ソフト作成,その1
つくばチャレンジの試作ロボット動作チェック 今日は学校の寮の日直. 寮監室にロボット,電源,工具一式持ち込んでつくばチャレンジの試作ロボットの 動作チェック. マイコンボード接続OK. スイッチ類OK,エンコーダ動作左右OK. タイマが動いてないのでプログラムをチェックする. その後,もう一方のシリアル通信の確認をして,モータ駆動できたら足回りの動作 確認完了. 後は適当に駆動系のコマンドを作って書込むだけ. --追記-- タイマが動いてない原因がわかった. intprg.c の中を書き換えるのを忘れてた. --追記2-- シリアルポート動作確認. DIP-SWの半田不良見つけた. --追記3-- PC->SH7125へのコマンド送信.レスポンス確認. PC->サーボコントローラの制御確認. PC->SH7125->モータドライバ,何か信号を送ってるものの,動作 不具合.計測機器がないと無駄に時間を取りそうなので止め. --追記4-- PC->SH7125->モータドライバ,左右モータ動作確認. PC<-SH7125<-エンコーダ読み取りOK. ハード的には予定した動作確認完了. 次はSH7125を介したコマンドをいくつか作ったらPC上のプログラムに 移行できる. 少々手間取った原因はほとんど接続ミスと接触不良だった・・・ 分かってしまえば簡単だが,SH7125の初めて使う機能のプログラムに誤りが あると思い込んでたので疑ってかかってたので,見つけるのに時間がかかった. PCからのコマンドで車輪が回ってる動画つくばチャレンジの試作ロボット,ちょっと改良
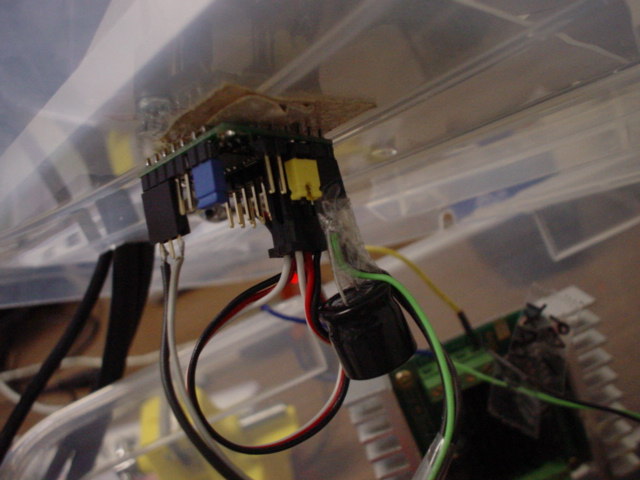
サーボは結構電流を食うので, シリアルサーボコントローラに最初に信号を送った途端に電圧が落ちて 上手く起動しないことがありました. なので,1000μF16Vの電解コンデンサを直近に接続.不恰好だけど,誤動作がなくなりました.
つくばチャレンジの試作ロボットのコマンド作成
モータを動かすコマンドをいくつか作りました. ・エンコーダリセット(0000H,1000Hの2種) ・エンコーダ読み取り(左右) ・モータドライバへデータ直送 ・モータ規定動作(停止,前,右旋回,左旋回,後ろ,・・・など) ・モータ規定動作(同上,低速) ・指定距離移動後停止(倍率×4) ・指定距離移動後停止(倍率×256) まで. 問題は,モータドライバにコマンドを送っても,ドライバが受信失敗する時が あること. 送ったコマンドとエンコーダ値の変化とを照合して,状態監視する仕組みが 必要そうです.GPSからシリアルでデータを取り出してみたら・・・
GPSからシリアルでデータを取り出してみたら,文字列がつらつら出てきたので, Webで調べたらNMEA-0183フォーマットというものらしいです. 参考URL http://bg66.soc.i.kyoto-u.ac.jp/forestgps/nmea.html その中から必要な情報を取り出すアプリをVB6で作りました. こんな感じ↓たいしたプログラムじゃないですが欲しい方はどうぞ 持ってるのはこれです↓
[即納]値下げ!【送料・代引手数料無料】【LCD画面付き!GPSデータロガー】M-241 GPSロガー秋月電子通商の3Dセンサー(TDS01V)モジュールをVBで・・・
秋月電子通商の3Dセンサー(TDS01V)モジュールをVB6で動かしてみ ました.(VC++でも.netでもなく今どきVB6,これしか使えないもので)また適当なプログラムですが欲しい方はどうぞ. ポートはCOM2固定,左から順番にボタンを押して動かします. こちらからダウンロードできます(TDS01control)
互換バッテリー?
ちょっと悩んだこと. 学校で使ってるノートPCのバッテリーがへたってるのでバッテリーだけ買おうと 思っていたら,丁度業者さんが来られたので見積もりをお願いした. ノートPC自体はもう5年前の生産終了品で中古なら市場価値ほとんどなし. 定価がいくらかネットで検索してみたら,互換バッテリーが定価の半値以下で ぞろぞろ出てきた. 互換バッテリーも校費で買えなくもない. でも,校費で注文するなら高くてもメーカー純正品を頼むべきなのだろうか. 校費の元は税金. 自分的には限られた予算枠でいろいろ買いたいけど, 安い中国製の互換バッテリーを買うのが税金の使い道として妥当なのか? 高くても国産(海外工場かも?)純正品を買って,まず国内に税金を還流させる べきなのか? --->結局純正品を購入しました.UHG-08LXをVBで動かしてみました.
HOKUYOのレーザ式測域センサ UHG-08LXをVisualBasic Ver6,VB6で動かしてみました. こんな感じで使ってみます↓アプリの画面コピー↓
ダウンロードできます, UHG-08LXをVBで制御 データ点数が多いので1回5秒程度かかってます. VBだとデータ点数を減らさないと厳しいです.
モータをPCからSH-7125マイコン経由で制御するマイコン側は作っていた のですが,PCで制御するプログラムを作ってませんでした. なので最低限の機能確認だけVisualBasicで作りましたこんな感じで↓片目をつぶってふらふらしながら歩いていたら・・・ 同僚が不審に思って声をかけてきました. 何をやってたかというと,ロボットの気持ちになって廊下を歩いていた, つもり.
考えれば考えるほど難しいです... 今日はGPSの専門家のI先生(Y高専)とディスカッション. いろいろと教えていただきました. 週末と今日の成果はこんな感じ↓メインの画面に配置されたボタンから各種センサを呼び出しで 個別のセンサを使った動作を確認しながら作っていくつもり. いまGPS単独を使ったモータ制御を思案中.


 ESP32 Wifi Bluetooth開発ボード |
 Arduino Nano Every |
 Raspberry Pi pico |
 FPGA XILINX Artix-7 |