ハーフサイズマウスの製作
以下,日記の形でまとめてあります.最後に完成したマウスの回路図を公開.夕方からちょっと,ハーフサイズ(1/2)マウスの製作
有って無いような設計図,というかスケッチ.
旋盤とかいろいろ買いましたが,結局のところ現物合わせで適当に工作. 金切りバサミとニブラが活躍しました.

ステッピングモータの軸も長いのでマジックで適当に印をつけてギコギコ.

やっと1個切れました.

こんな感じで組合わせます.

タイヤをつけると適当に空けた穴も隠れます. 下が浮いてますが,タイヤは旋盤で径を小さくして,肉厚を薄くする予定.
迷路に置いてみると,いい感じでしょ.
ステップモータにタイヤを直結するなら機械的な加工はほとんどいらないし, 小さい分強度も必要なさそうなので,こんな感じでハーフ1号機は行きます...
今日はホイールを削りました.
ツクモロボット王国で買ったホイールを削りました. このホイールは削って直径を合わせるにはいいです.
OリングタイヤホイールセットM30314/1S
まず,棒にM5のメネジを切って治具をつくり,タイヤをネジで固定して, カリカリ削りました.

タイヤホイールの加工
1/2サイズ マイクロマウス のタイヤホイールの加工ができました.加工前後.
ミニ旋盤に慣れて力加減が分かってきたので, のホイールは割と早く削り終わりました.

ホイールの下には1mm弱の隙間があります. ここに2.5mmのスポンジゴムを貼る予定です.
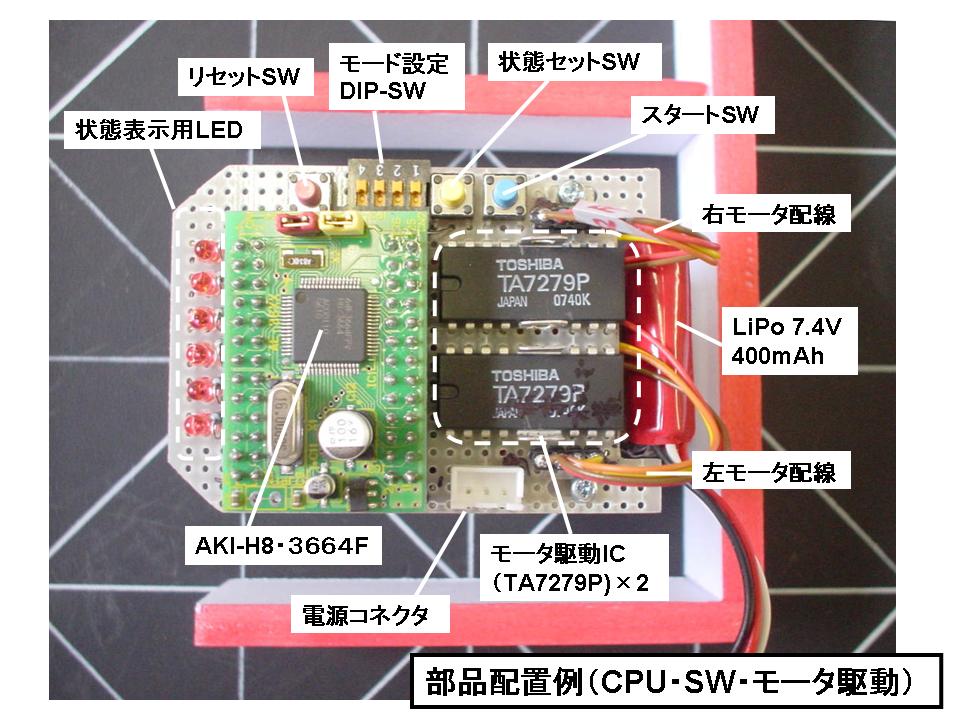
ハーフサイズマイクロマウスのT形基板
基板加工中です.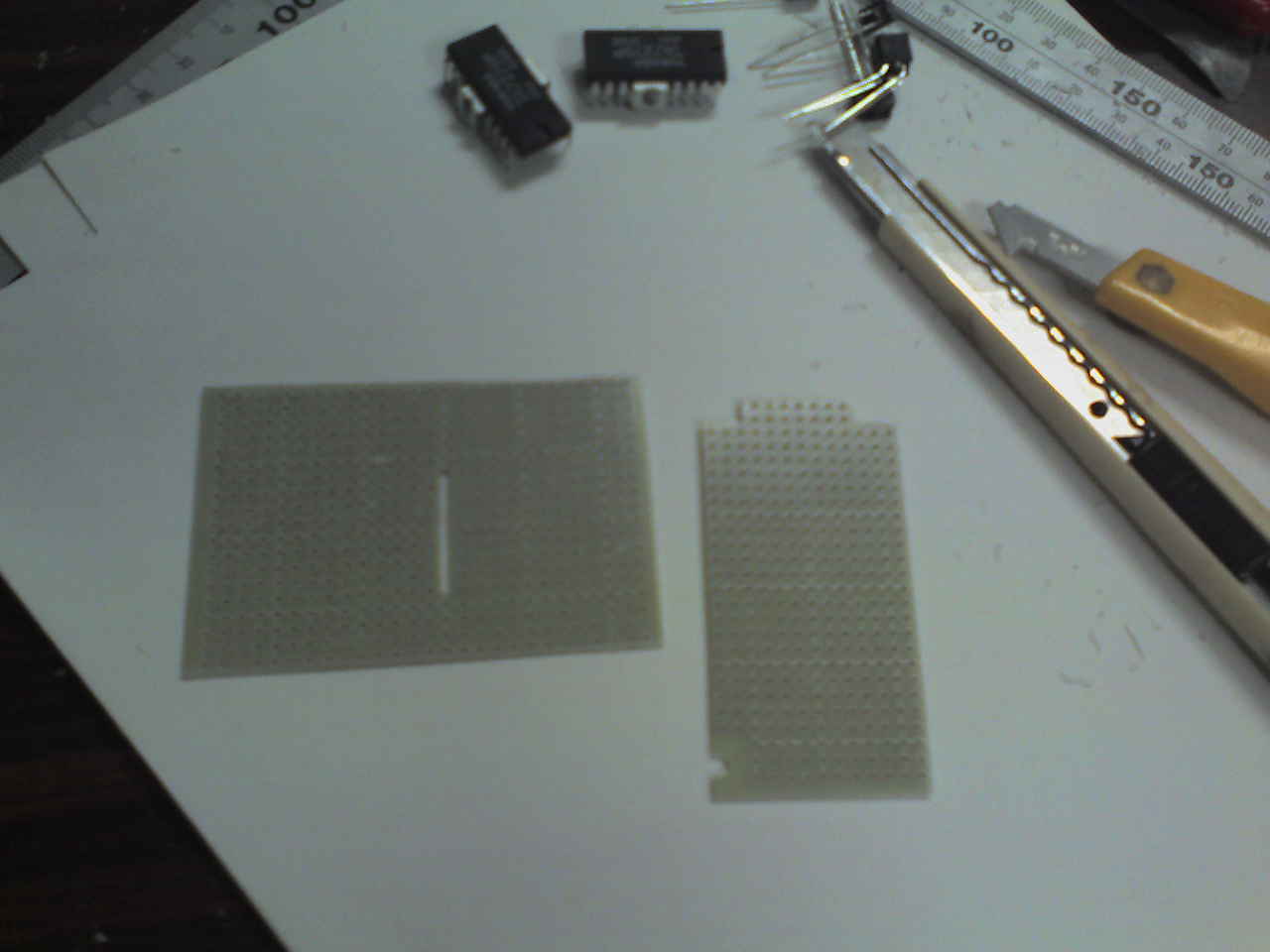
瞬間接着剤とキャタライザーで一発接着.

出来上がりはこんなイメージのT形基板です.
これに部品が全部乗るかなぁ・・・?
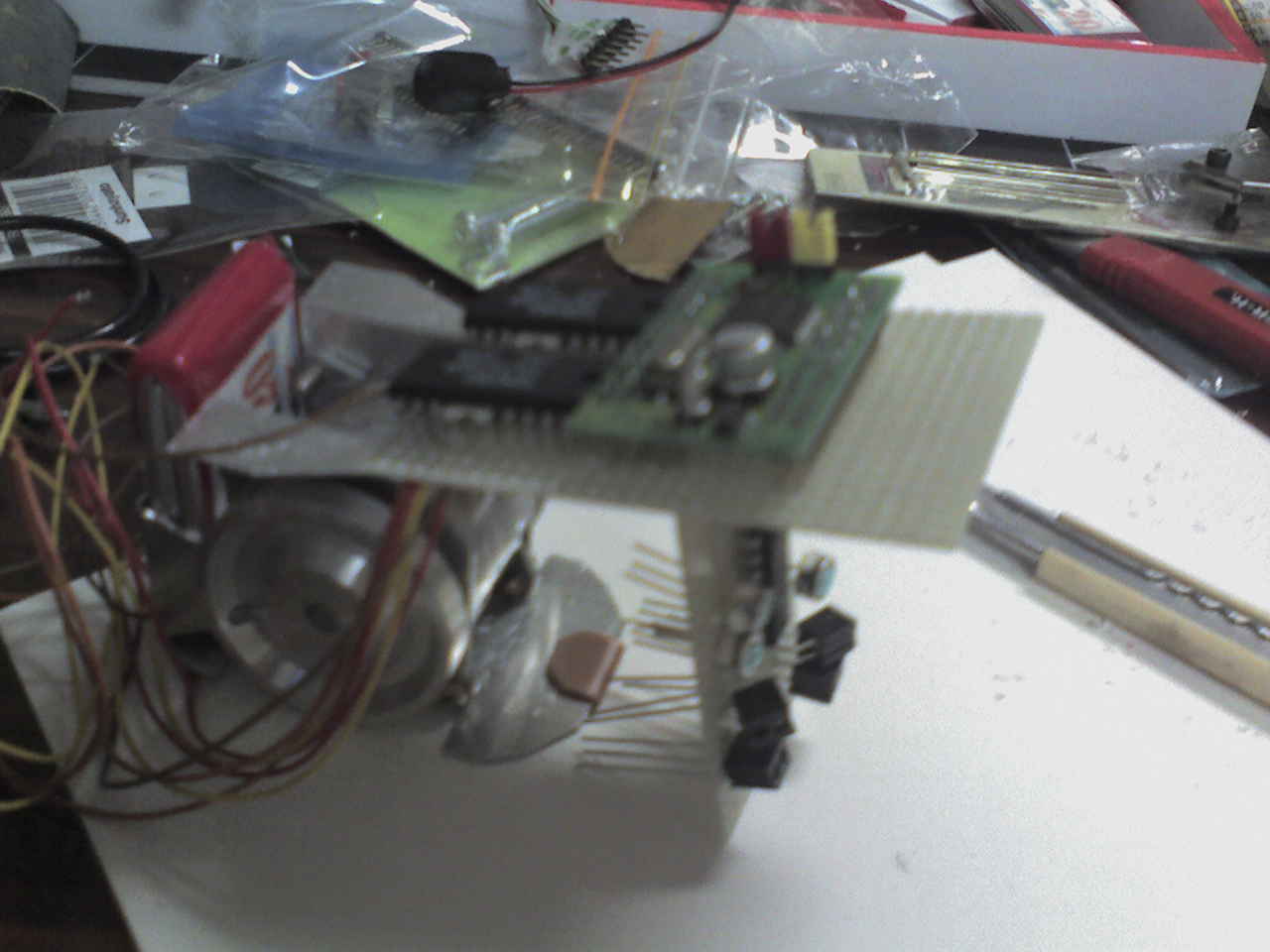
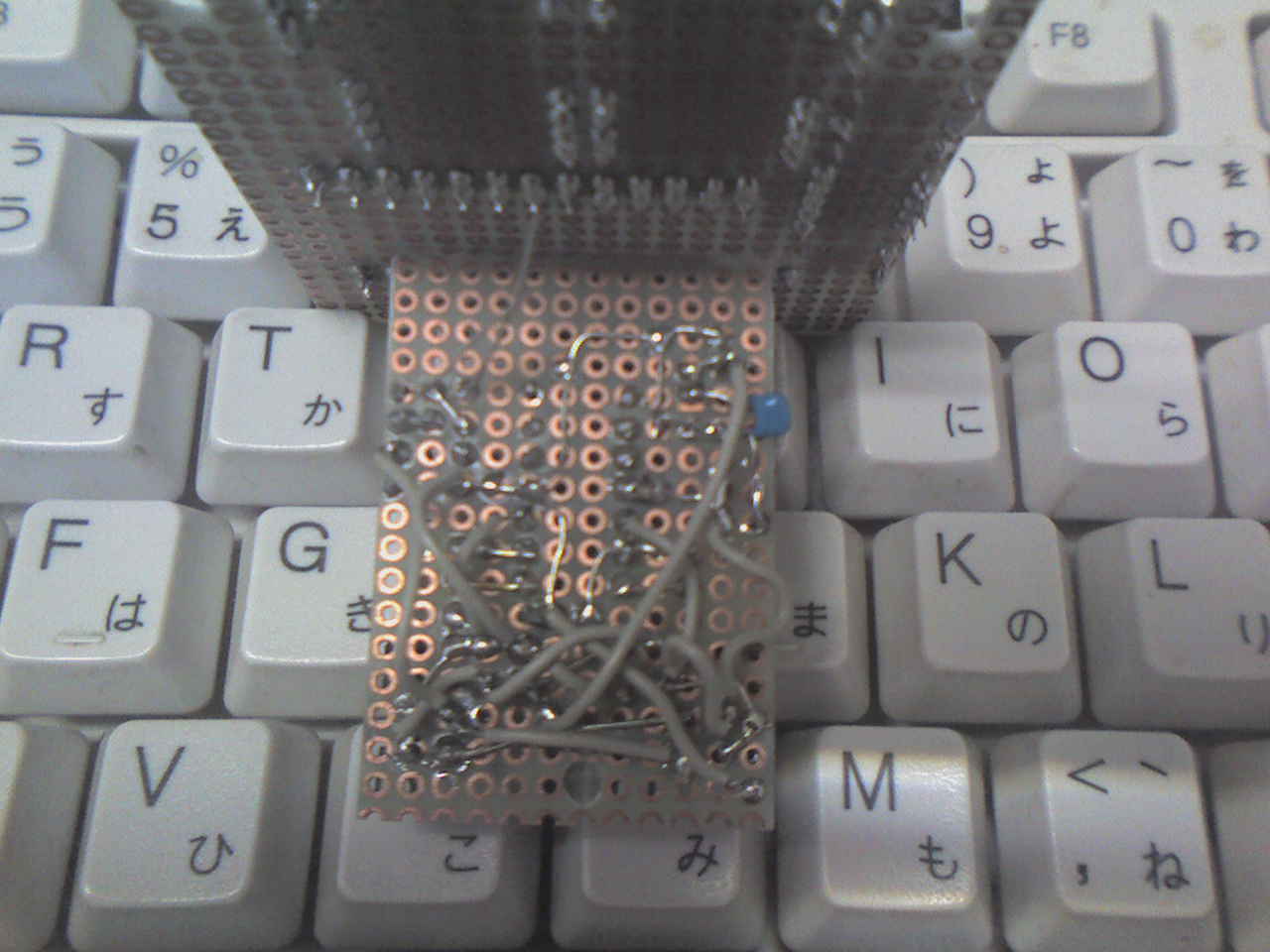
半田付け中
ハーフサイズマイクロマウスの半田付け中. ユニバーサル基板にきちきちで部品を並べて裏で配線を作ってるので まさにスパゲッティー状態です. 間違えたら,見つけるのに苦労しそう.途中経過(センサ部分)↓
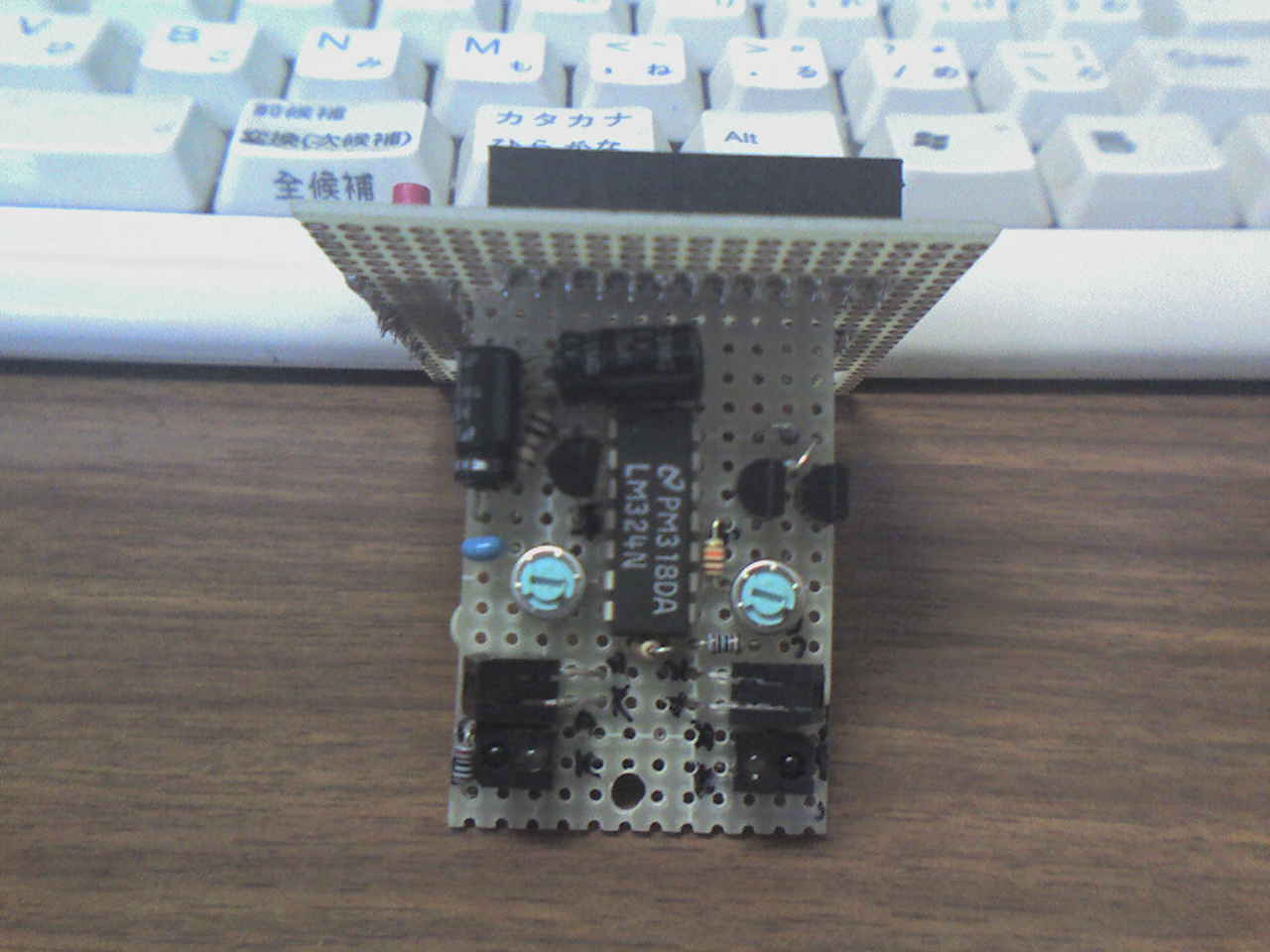
ハーフサイズマウス ハードウェア完成
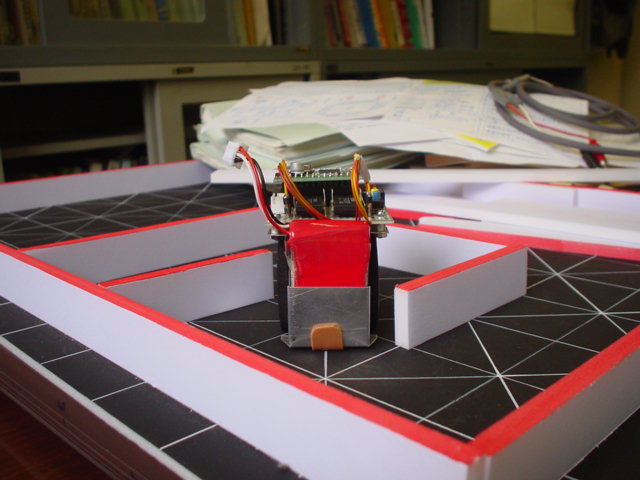
ハーフサイズマウスのハードウェアが一応完成しました. (一応というのは,ちょっと不安材料があるから)迷路に置いたところ.
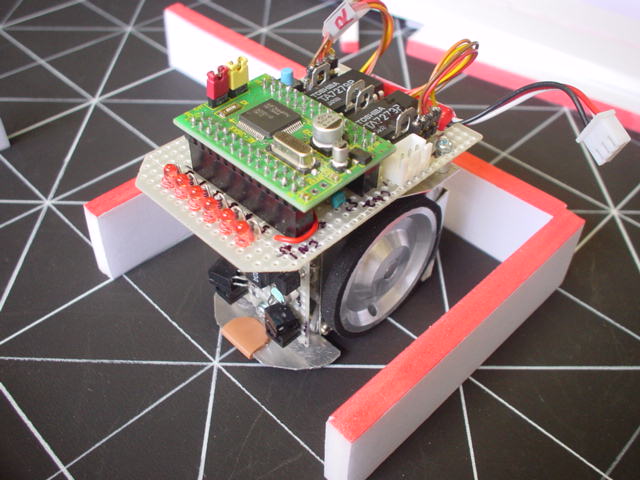
ぎりぎり斜め幅に収まってます.
足回りの幅は43mm,長さ69mm(5mm短縮可)
高さは突起部のぞいてH8の基板面まで65mm.
重量197g です.
ツェナーダイオードを使った電圧モニタ回路
バッテリー切れに気づかず,LiPoを傷めてしまったようなので, 電圧モニタ回路を追加で作りました.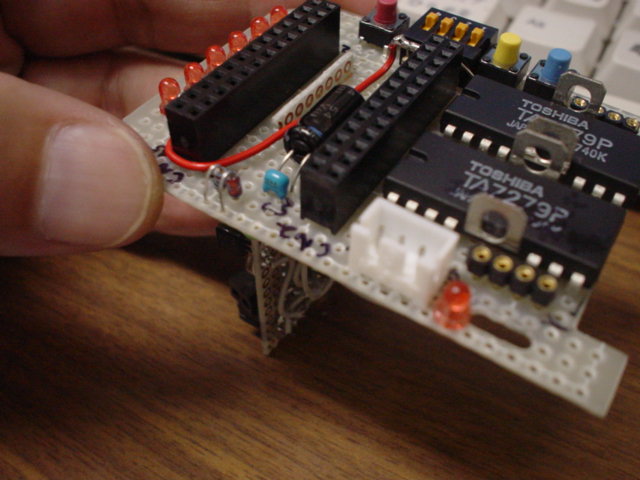
6.2Vのツェナーダイオードと1kΩ抵抗(写真に写ってる親指横に縦に並んだ 2つ)とLED(電源コネクタ横)が直列に接続され,電源に並列に接続さ れています.
LEDは定格電流で2V近くのドロップがあるので,電源が約8VでLEDが暗め に点灯します.電圧が落ちるとスーッと暗くなり7Vでは完全に消灯します. 急ごしらえの割には,LiPoの定格近くでLEDの明るさが面白いように変わって 良い感じです.
回路図






 ESP32 Wifi Bluetooth開発ボード |
 Arduino Nano Every |
 Raspberry Pi pico |
 FPGA XILINX Artix-7 |