Tricopterの製作
トライコプター(Tricopter)は正三角形である必要はないはず…
トライコプターはほぼ正三角形で皆さん作られているようですが、
前後わからなくなるし、後ろが原理的に非対称になるので、
正三角形に作る意味は多分見ためと調整のし易さなんだろうなぁ、と思って、
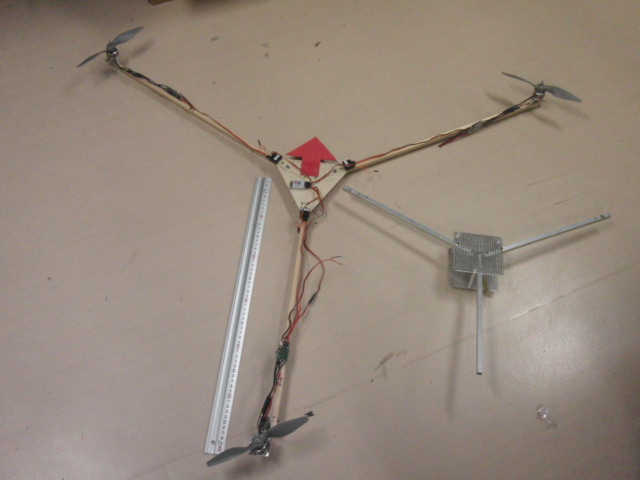
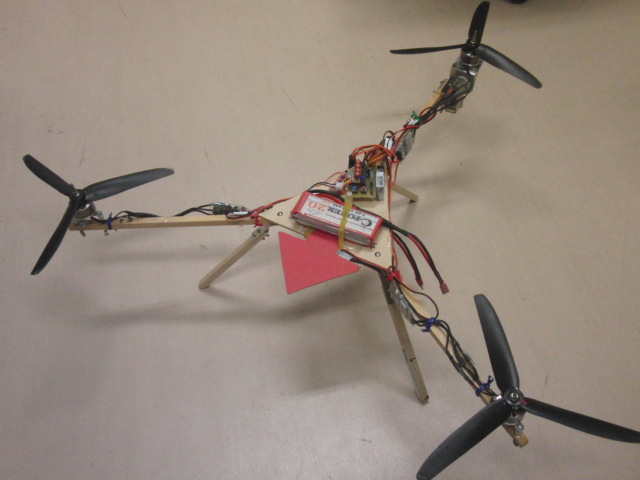
どうせならはっきり前後ろわかってお手軽な形に作ってみました。
飛行機しかまともに飛ばしたことない(ヘリはシミュレータとトイラジだけ)自分には、
この方が素直な気がします。
空撮やるにもどうせ前しか写さないし。
製作時間はここまで3時間。ほとんど目分量、現物あわせで急ぎの工作。
これから仕事が忙しくなるのであんまり時間がかけられません。
あとは、配線とサーボのミキシングをどうかけるかをぼちぼちやれば飛ぶか、
それとも落として壊すかも。
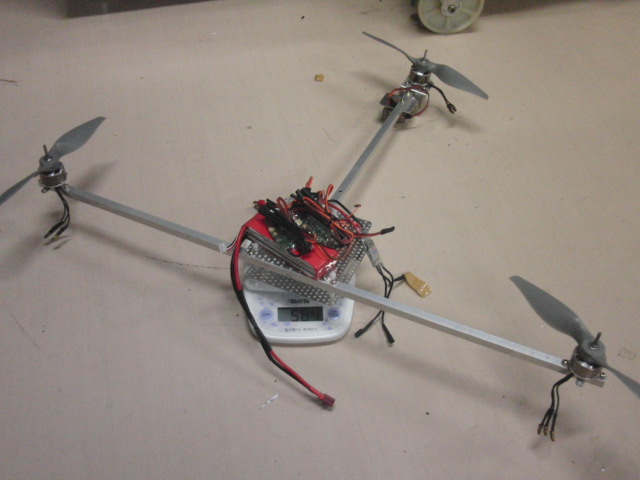
完成後の重量は600g弱くらい。
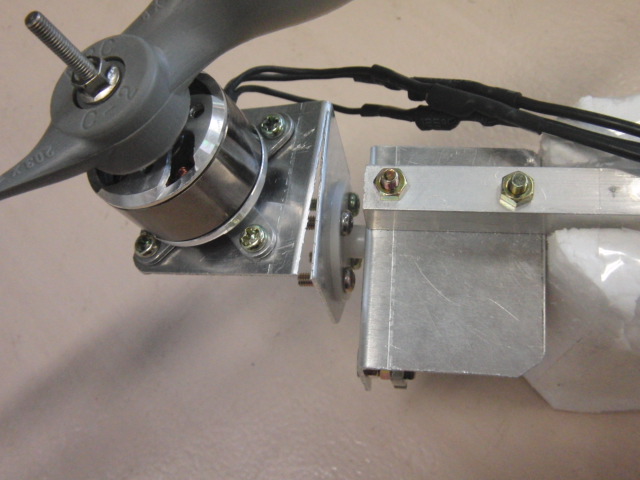
後ろはこんな感じ↓ 中型のプラサーボに直結なので、落としたら一発で壊れます、多分。

参考URL
http://rcexplorer.se/projects/TriV2/TriV2.html
http://rcexplorer.se/projects/tricopter/tricopter.html
http://www.blueskyrc.com/index.php?main_page=product_info&products_id=16

AR.Drone(エイアール・ドローン)【直送品・代引不可】
トライコプター(Tricopter)調整中
トライコプターの接続と送信機のミキシングのかけ方とジャイロの方向の基本形はできた。前二つのローターはお互い逆ピッチになるようにした。
左前ローターをスロットル、
右前ローターをエルロン、
後ろローターをエレベータ、
サーボをラダーに接続した。
スロットル→エルロン 100%近くから調整、
スロットル→エレベータ 100% 近くから調整、
エルロン→スロットル 100% でロール軸、
ジャイロはそれぞれのローターの動きを補償する方向に取り付けて感度調整、
後ろローターだけの反トルクはそう強くないようで、ヨー軸はラダーのトリムでわずかに傾けるだけでよかった。 これもジャイロで傾きに補正を入れた。
エレベータとラダーのミキシングをどのくらい入れるかは飛ばしてみないとわからない。不要かもしれない。
畳の上で調整して、ほんのわずか浮くくらいにはなりました。
バッテリー切れでいったん終了。
剛性が足りないのとローターのバランスが悪いので結構振動があり、ジャイロの誤動作もちょっと心配・・・
やっぱり後ろのサーボはちゃんと軸を作ってから取り付けたほうがよさそうです。特にここがブルブルしてます。
トライコプター(Tricopter)に足つけた。
配線して足つけたらこんな感じ。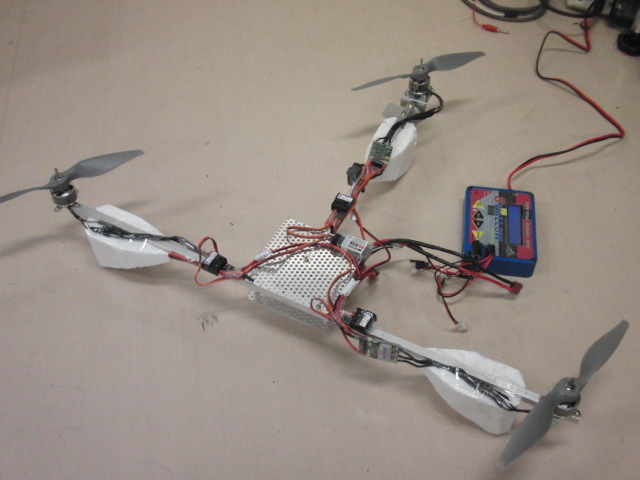
ー追記ー
勤務時間が終わってから調整再開。7.4Vではフル充電でぎりぎり浮くくらいだったので、11.1Vに 交換したら余裕のパワー。でも重心位置が変わってエレベータのミキシングの調整が変わって面倒。 やっぱり正三角形じゃないのは面倒かも…。
ちょっと浮きすぐ下ろしを繰り返して少しずつ安定してきた。
でもまだまだ飛んだとはいえない状態。
トライコプター(Tricopter)練習中。
飛行機の場合は進行方向に対してどう舵を当てるかというのを体が覚えてますが、 ヘリの場合は勝手が違いますね。テイルローターのところが弱く、回転を上げる途中で共振するポイントがありかなり振動します。 金属疲労を起こしていたようで、操作を間違えてぶつけた拍子に壊れました。
部品を作り直して、同じことが起こらないように補強。

それから、いまのままだと、テイルの荷重が小さく、前2つのローターに荷重がかかりすぎているので、 均等に近くするため普通に正三角形近くに直そうと思います。
(前のローターは逆ピッチのまま)
基板削りの待ち時間中、作業途中で止まってたトライコプターの修正をしました。
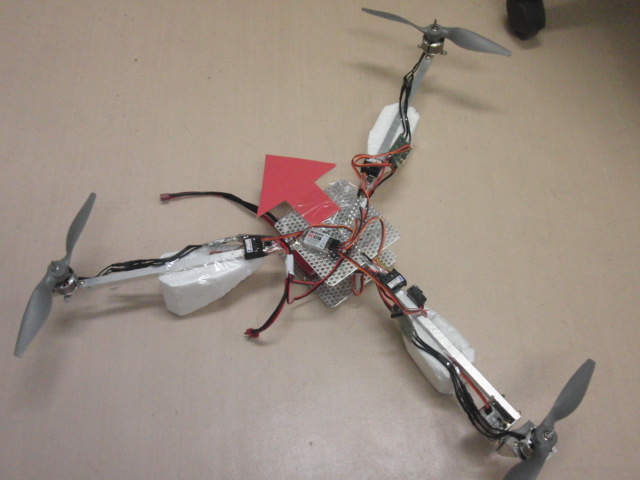
バランスが悪かったので正三角形に近い形に長さを調整。尾翼の傾き調整用サーボの固定板が風を乱していたので、 90度回転して取り付け直し、足もプロペラの投影面にかかっていたので内側に付け替え。試しに室内で回してみたら安定性が増した様子。近いうちに広いところで飛ばしてみます。

雨が続いてて外で飛ばせないので、細かい工作。
これ↓
透明テープで貼りつけてできあがり。

トライコプター作り直し
これまで作ったものは、ジャイロの感度を上げるとハンチングをおこし、 感度を下げると安定が悪く、操縦が極端に難しくなりました。大きくすると安定性が増すそうなので本体を作りなおすことにしました。
木の棒を買ってきてサーボやアンプのケーブル長で最大の大きさになるように作り直し。
あとちょっとのところ、電源ラインを接続してケーブルをまとめれば完成。
トライコプター、ちょっとだけ浮いた
本体を木組みで大きく作りなおして、安定性が増して、ちょっとだけ浮きました。ジャイロの調整と送信機のミキシングとトリム調整すれば、もうちょっとで飛ばせそうです。

動画はこんな感じ
トライコプター(tricopter)R/Cは完成でいいかな?
トライコプターをまた飛ばしました。いちおう飛んだのでR/Cは完成ということにしときます。このあと操縦ミスで落として壊してしまいましたが。それもすぐ修理できたので、あとは地道に操縦練習します。

トライコプターの動画
自作トライコプター(Tricopter)改良
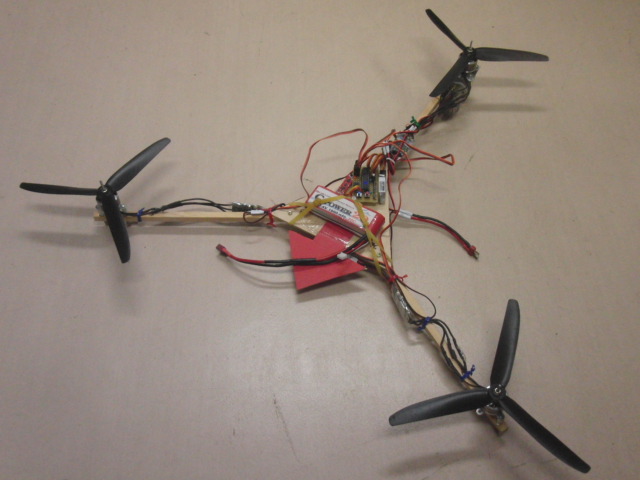
完成したと言いたかったところですが、大きくて置き場所を取るので、トライコプターを改良してみました。棒を切ってサイズを半分に。GWSの3枚ペラでサイズが一つ大きいものを調達。
低回転で浮きがよくなり、振動が減って、ジャイロのレスポンスも良くなり、電池のセル数も減らして軽くなりました。
普通のジャイロ4個と送信機のミキシングだけでも、 以前苦労していたのがなんだったんだろう、って思うくらいに安定してます。

-追記-
とは言っても、ピタっと止まるわけではなく、それなりの安定性しかないので、 次はマイコンを組み込んで制御してみるつもり、基本的にはクワッドと同じ考え方で行けると思います。こっちは完全自律を目標とせず、RCメインでコントローラを組んでみます。
トライコプターのコントローラ自作中
GWSのコントローラが何にも悪い子としてないのに燃えてしまいました.これを機会に,以前作ったトライコプターのコントローラを自作してみることにしました.
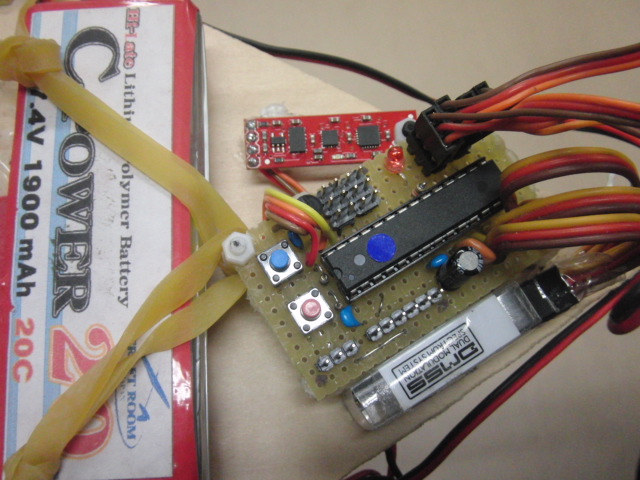
以前は,ラジコン用のジャイロを4つ使って安定化して飛ばしたのですが, 今度はマイコンと9軸センサ(9DOF)を使って自律安定性を高めてR/C制御する形に変えたいと思います.その様子↓
コントローラ部分拡大.アナログ入力ピンに4つのボリュームを搭載して制御係数を可変できます↓
ちゃんと飛ぶかなぁ...?
それから,全部自作してみるのは楽しいけど結構大変なので,こちらのサイトのグループに参加させて頂くことにしました.(直接知ってる人は一人しかいませんが)
Japan ArduCopter Group
トライコプター進捗,突発的な暴走の原因は・・・・
モーターを回してると突発的にモーターが暴走して,危険な状態に.だんだんとその頻度が上がって,しかもモーターの回転数が高いほど頻度が高い.
制御係数をいじっても止まらず,制御係数0でもだめ.
もしやと思って試してみたら原因が分かりました.
ボリュームで比例係数を調整できるようにしていたのですが,振動でボリュームの値がふらついていたのです.半田不良か,接触不良か,ボリューム内部の接点の問題か?
いずれにせよ,スロットルオフの時にボリュームの設定値を読み取り,モーターが回っている時は一定の制御係数を使うようにしたら暴走はなくなりました.
これで結構時間を食ったのですが,原因が分かってよかったです.
ずいぶん安定してきましたが,まだ手放しでは飛ばせない状況.初飛行はあと2-3日後.
トライコプターに足つけた.
ちょっと浮いたのともっと浮かせたのでは調整が違うので,持ち上げようと思って足つけた.ちょちょいっと端切れを加工.

こんな感じで裏面にネジ止め.
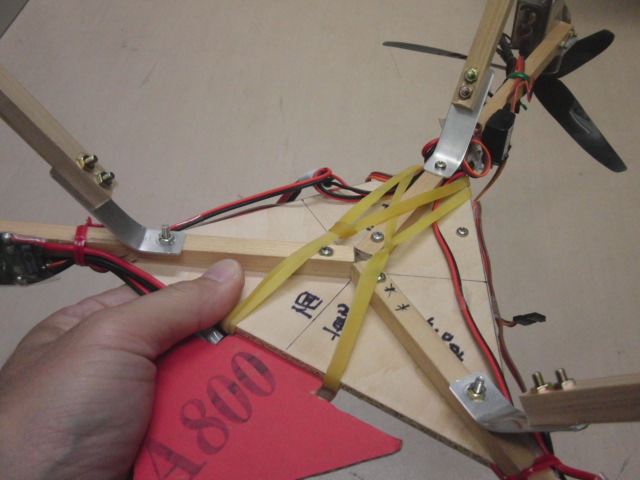
いい具合に足が付きました.軽くクッションもあって良い感じ.

 ESP32 Wifi Bluetooth開発ボード |
 Arduino Nano Every |
 Raspberry Pi pico |
 FPGA XILINX Artix-7 |