トライブレイドコプター
ちょっと変わった飛行体を作ってみました.モノコプター(Monocopter),バイコプター(Bicopber 例えば,BladeStar)などありますが,このように3ロータを回して自転しながら飛ぶトライコプターはネットを検索しても見当たらなかったので作ってみました.
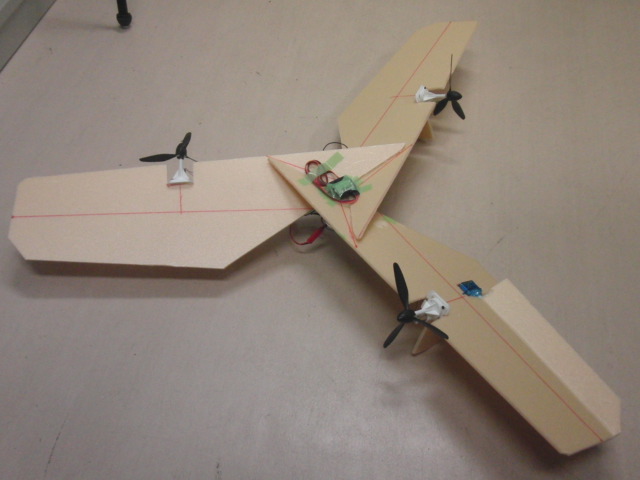
自称,トライブレイドコプター( TriBladeCopter ).既に誰かが作って名前をつけてたら教えて下さい.
今後は浮くだけでなくて,地磁気センサを使って方位を検出しながら横方向の操縦ができるようしてみます.
こんな形にした利点は,翼面積をかせぎ,十分な浮力を得て,安定性も高くなるように,自転スピードがあまり速くならないようにして操縦の応答性を余裕をもたせられないかと思ってです.この回転速度なら普通のサーボのレスポンスで十分に操縦できると思います.
動画はこちら,トライブレイドコプター
--追記--
高度が低いと地面効果で安定しているのですが,1mくらい上げるとふらつきがはじまります.尾翼の1つにサーボとジャイロを加えてみると安定性が増しました.写真も改良したものと入れ替えてあります.
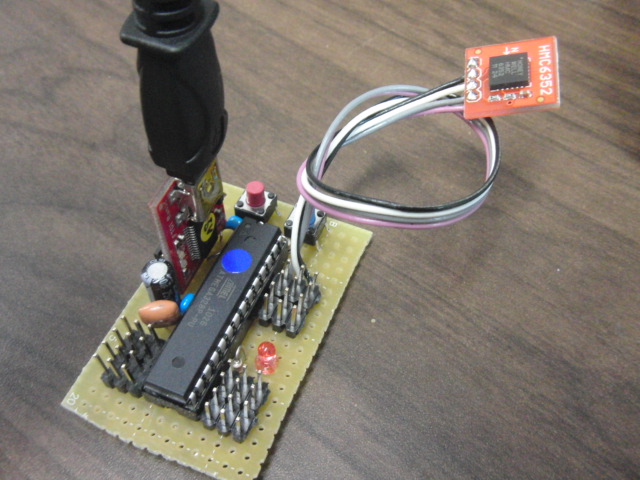
ArduinoによるRC飛行機コントロール基板をまた作った.
昨日の飛行体のコントロール用の基板が完成.重さは約15g.Arduinoのブートローダーが乗ったATmega328Pを使って, I2Cとシリアル通信,受信機4ch,サーボ4ch,アナログ入力4ポート, スイッチ入力,リセット,表示用LED1個が乗ってます. このパターンで作っておくと,お手軽にRC機器をマイコン制御できるので,同様なものを何個も作ってます.基板を外注しておいてもいいのかな.
写真は書き込みとコンパス受信テスト,20Hzで方位をシリアル通信で送ってきてます↓
トライブレードコプター(仮称)が操縦可能になりました.
とりあえず誰からもご指摘が無いのでトライブレードコプター(仮称)で製作の続き.コントロール基板を乗せました.操縦の原理は,前に紹介した自転式の飛行体と同じ考え方で,地磁気センサを使って回転中の自機の方位をモニタし,回転に合わせて可動翼を動かして回転面を任意の方向に傾ける.また,不用意な傾きに対してジャイロで補正をかけて安定化をミックスしています.
上面には,ジャイロと地磁気センサ↓
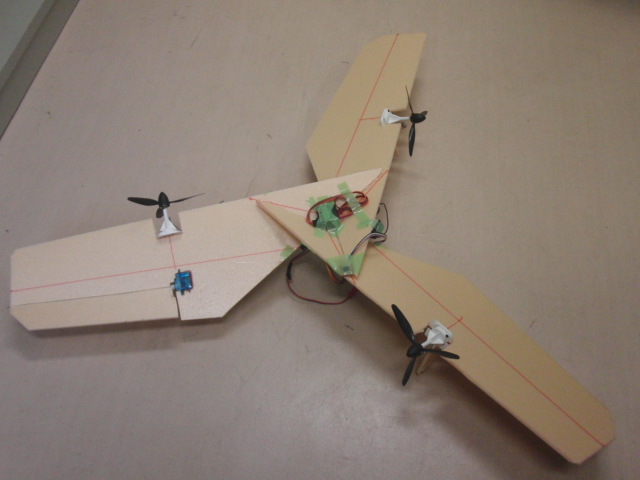
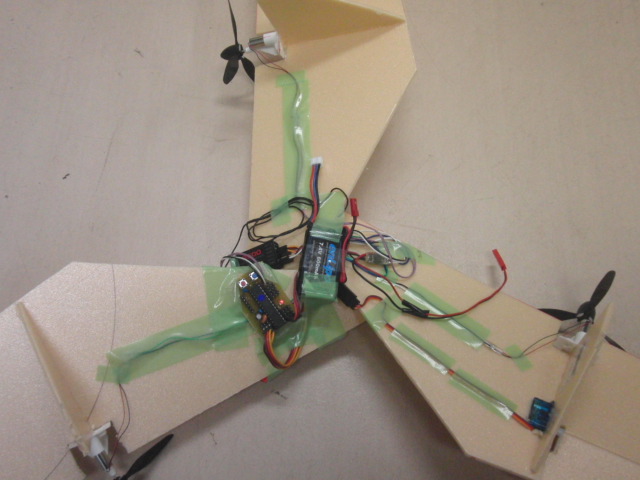
下面に基板とバッテリ,受信機↓
飛ばして見たら,任意の方向への移動が可能でした.
しかし,幾つか改良点が見つかりました.とりあえず原理的な検証はできたので,おいおい改良していきます.
その動画→ Tri-blade-copter(飛びながらゆっくり左右に動かしています)
モータ焼けた...
トライブレードコプターの電源には,マイコンの電源電圧や手持ちのアンプの関係で,7.4VのLipoを使ってたのですが,案の定モータが焼けてしまいました.本来は3.7Vのモータで定格の倍の電圧をかけて,電流も1A以上流していたので時間の問題だったのですが結構早く焼けてしまいました.でもこの機体構成で安定性に関する実験をあとちょっとしたいので,数個モータを買い足して飛ばしてみることにします.モーターを消耗品みたいに焼きながら使うのは気がひけますが,安価で手頃なギヤダウンユニットがなかなか見つからないので.
あとは,構成部品と機体を出来るだけ軽量化して負荷を減らすくらい.
広告↓

【送料無料選択可!】Arduino+Bluetooth Androidプログラミング サブボード「シールド」で機能強化! 小型マイコンにつないだ外部アクセサリをスマホで制御 (I/O) (単行本・ムック) / 丸石康/著 鈴木圭介/著 仲見川勝人/著 IO編集部/編集

 ESP32 Wifi Bluetooth開発ボード |
 Arduino Nano Every |
 Raspberry Pi pico |
 FPGA XILINX Artix-7 |