作り始めるまで
つくばチャレンジ2008を見てきました朝の飛行機に乗ってつくばについたのは、11:30ごろ。 つくばチャレンジはすでに始まっていて、リタイヤ続出でもう終わるところでした。
数台の走行を見て終わり。
ずうずうしくも丁重に、ピットに入って出走者の方々にお話を伺って来ました。 何が原因でリタイヤしたか、とか気の毒ですが一番知りたいところなので聞いて みたら、皆さん嫌な顔をせず教えてくださいました。
結局、距離を測るとか、障害物を避けるとか、GPSの信号の処理とか、 機械的な故障とか、段差や傾きを補正してまっすぐ走るとか、 基本的になことが結構難しいようです。
センサもいろいろ複合的に使っているのかと思ったらそうでないものもありました。 ちなみに、ロボットの現地への輸送はどうしているかも聞いてみましたが、 皆さん車で運んで来ているようです。
というわけで、来年チャレンジしてみます。 さすがに九州から車でというわけには行かないので、 陸送か、また、分解してカバンに入れて運ぶか・・・?
(先日のIJEロボコンは分解して手荷物で運びました) 目立つようにある程度大きくないといけないそうですが、 タイヤだけは大きく作って後は小型軽量化してあとは風船でもつないどきますか。
GPSのデータ(予備実験)
GPSからターミナルソフトでデータを読めるそうなので,読んでみました. こんな感じです.(自宅でデータ取りましたので一部伏せています)
GPSってすごいですね.
なぜなら,断熱材なし築30年以上の我が家の中に電波がビンビン入ってきます. シリアルで読み込んだデータによると最大13個の衛星が捕捉できているようです.
今日はちょっとGPSのことをあれこれネットで見てました.
それからM-241とi-gotUを同時にPCに接続し両者を比較してみました. M-241はデバイスのプロパティで見たボーレートでは変な文字を吐き出して いたので,ボーレートを変えてみたら上手くMNEAが読めました.
お金があれば高価なGPSを買ったほうが使えるんでしょうが,電波が届かなけれ ば意味がないので,安価なGPSと他のセンサを組合わせて使うことを考えます. 他のセンサといっても,高価なレーザ式測域センサには手がでないので, 安価なUSBカメラでがんばってみるか・・・

【新発売】【小型!GPSデータロガー】 USB i-gotU(GT-120) トラベルロガー【お買い物マラソン1217】
とりあえずOpenCV
前に書いたHSPのマニュアルを一通り読みました. 小中学生相手に,HSPを使ったゲームプログラミングの公開講座なんかうけそう ですね.しかし,一から画像処理のライブラリを書くのも大変そうだし, 言語が頭の中でごちゃごちゃになりそうなので, 前に読んだ本にちょっと紹介してあったOpenCVを使ってみることにしました.
あれこれやったらサンプルのプログラムがビルドできて動いたので, やっぱりこっちで試してみます.
OpenCVインストールのメモ
OpenCVのサンプルを動かしてみただけですが.
なかなか面白いです.子供も大喜び.
↓顔認識.正しい結果か誤認識か?
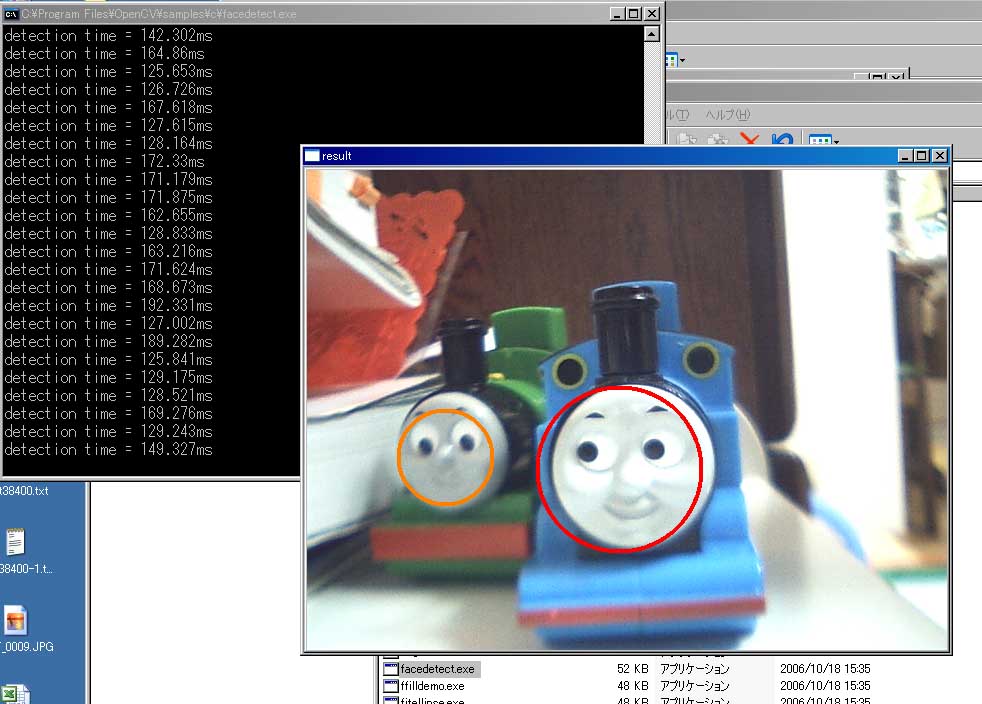
同じ.exeファイルを2重に開いて2個のUSBカメラでそれぞれ認識でき ました.
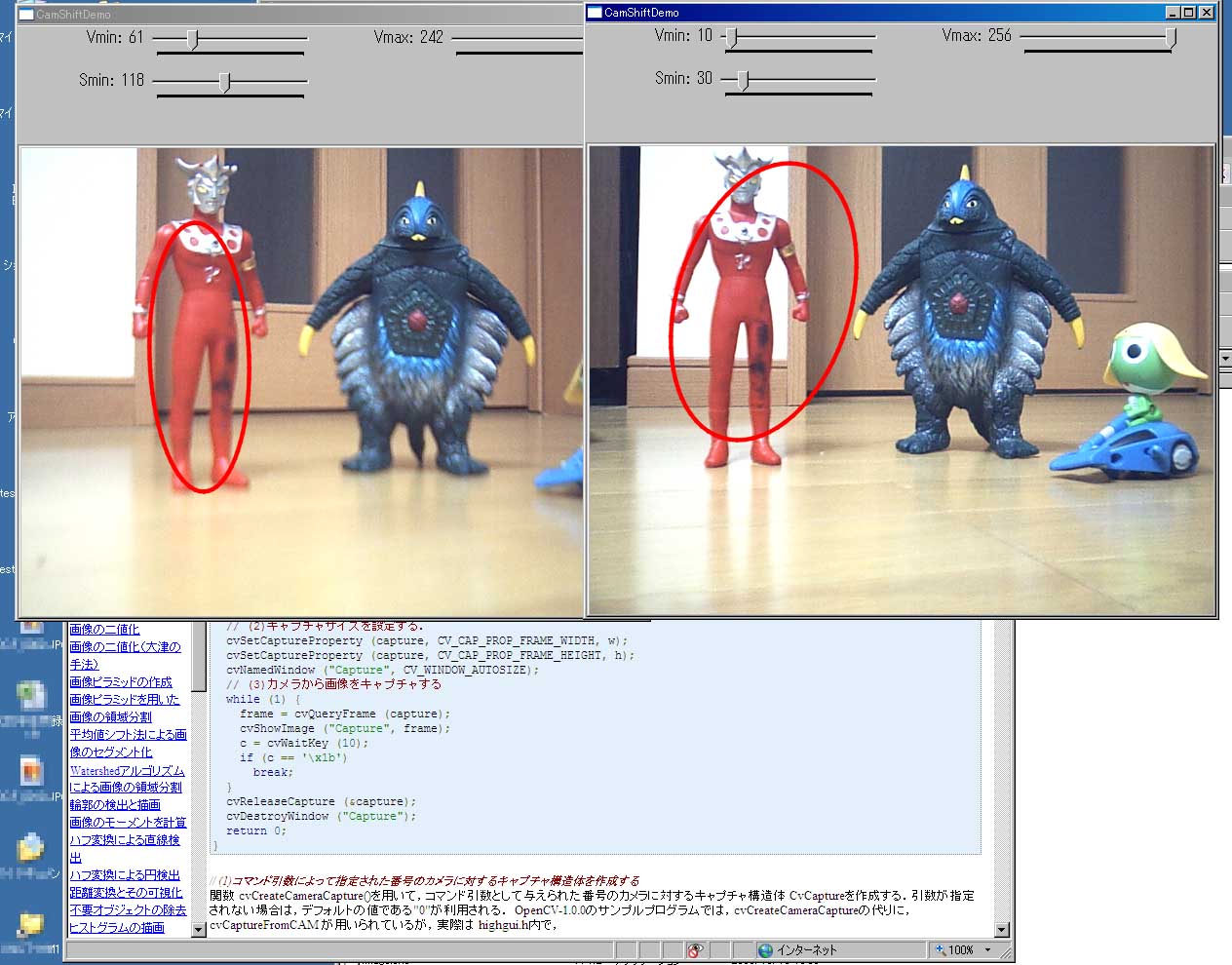
その後,ちょっとプログラムを組んでみました. USBカメラ2台を接続してそれぞれから画像を取り込んで表示させてみたり...
USBカメラ2台の画像で距離マップ作成
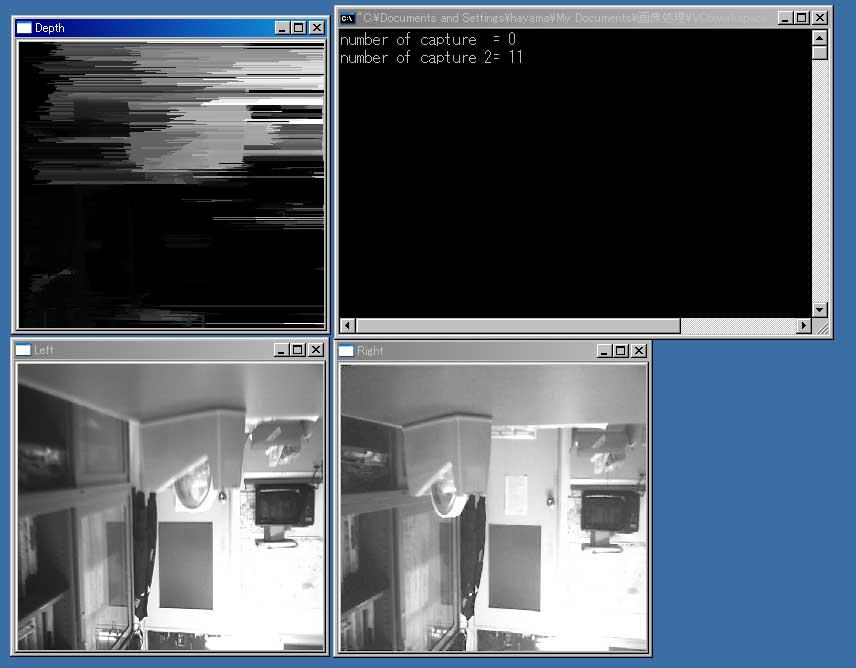
USBカメラ2台の画像を取り込み,OpenCVのサンプルを使って, 距離マップを作成して表示してみました.あまり綺麗な画像ではないですが,近くに置いたものだけ認識しました. カメラをきっちり位置あわせして,パラメータの調整をしないといけないようです.
完全な距離マップは自分には必要ないので今日はここまで.

OpenCV(シーヴィ)プログラミングブック

ロボットの目をつくる

 ESP32 Wifi Bluetooth開発ボード |
 Arduino Nano Every |
 Raspberry Pi pico |
 FPGA XILINX Artix-7 |