ロボトレース本体の製作
ロボトレースの製作その4,足回り
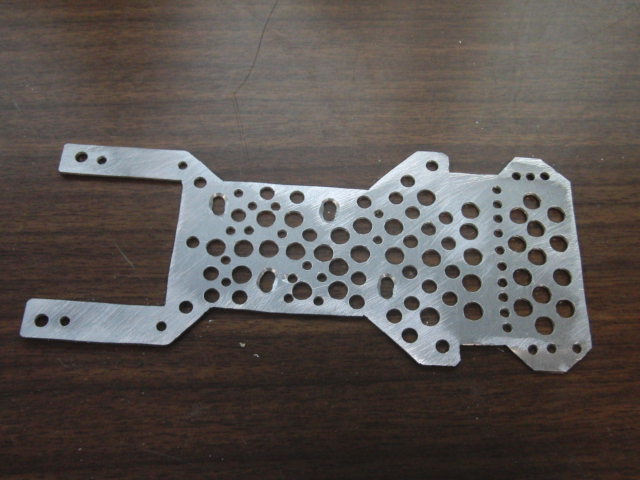
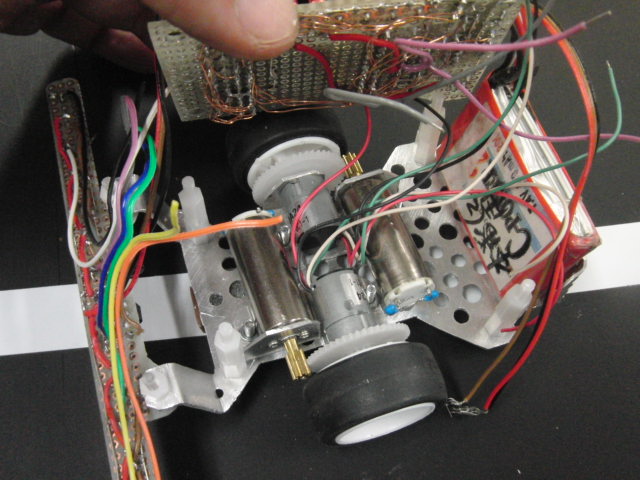
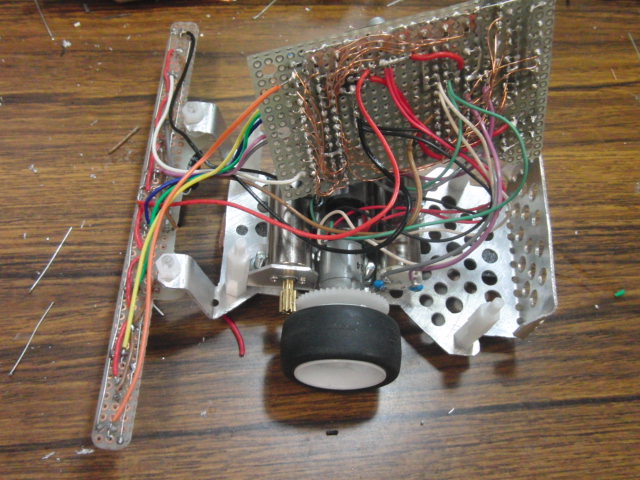
現物あわせで適当にアルミ板を曲げて穴あけて作りました.
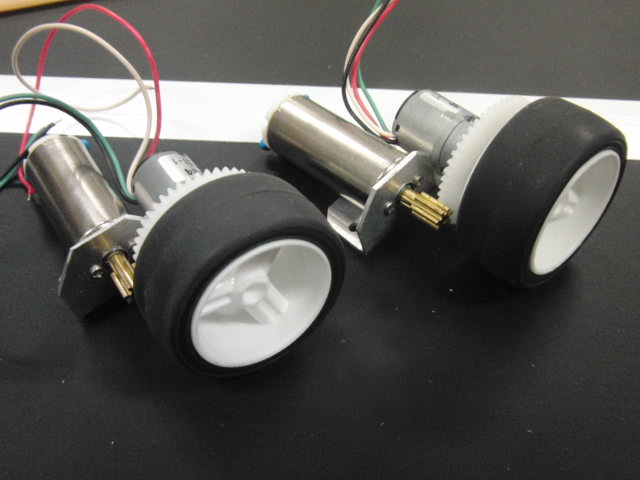
さてどんな風に組合わせようかな.
アルミでベースを作って組む? 基板を2枚重ね? 広い1枚基板で作るか?
ロボトレースの製作その5,センサ基板
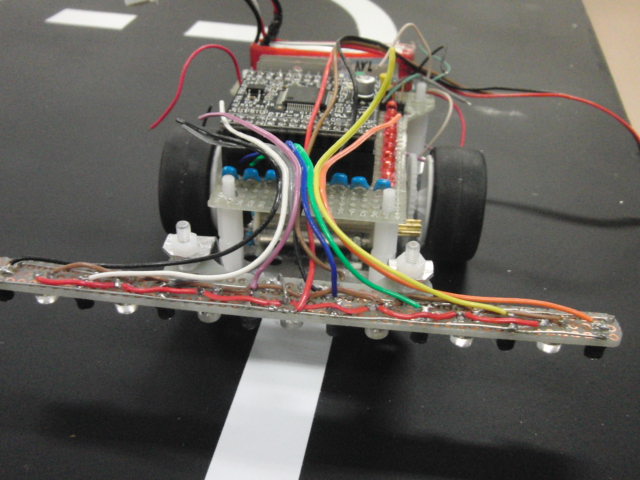
8個のアナログセンサを左右のマーカーの幅まで均等に並べて,その間に光源を置いてみました.こんな感じです↓
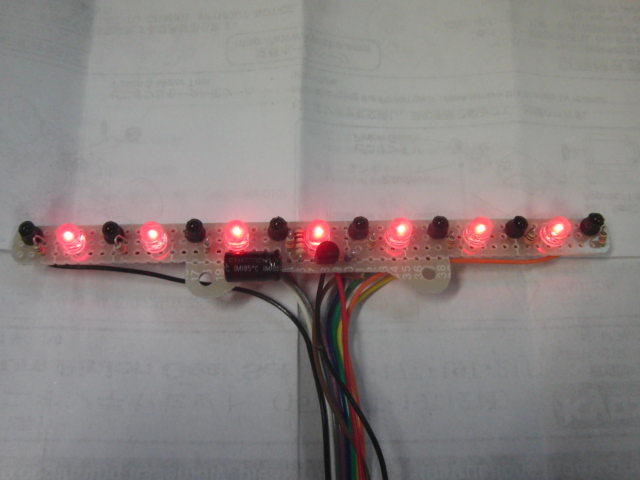
重心から離れたところで振り回されるので,軽めに作って10gでした.だんだんと形が見えてきました.
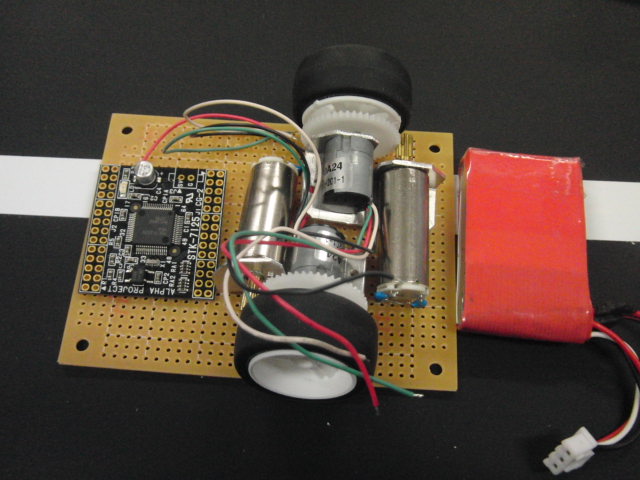
ロボトレースの製作その6,メイン基板作製中
重心は高くなりますがステアリング無しで小回りが利くように2枚重ねることにしました.
メイン基板は主要部品をできるだけ詰めて配置し,チップ抵抗を裏面に使ったりして省スペースします.
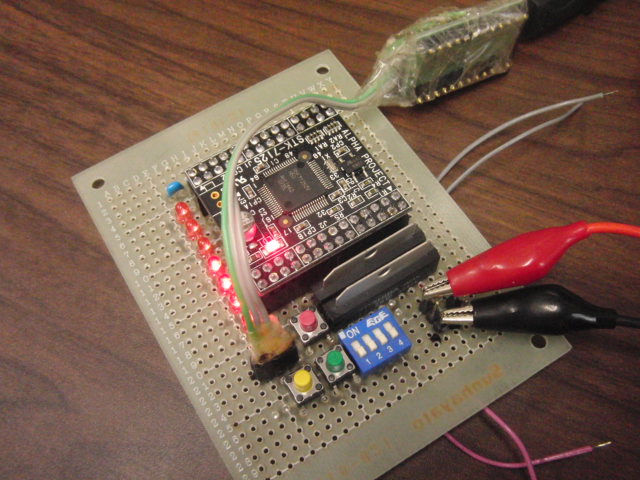
--追記--
ボードの書き込みとLED点灯だけはできました↓
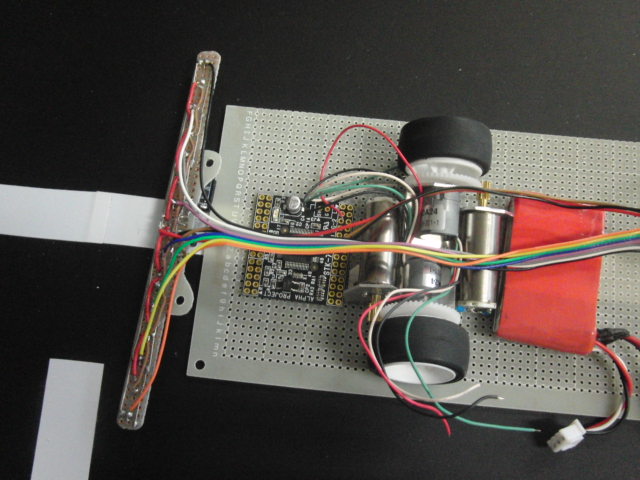
ロボトレースの製作その7,ボディの製作(追記)
現物合わせて目分量で適当な感じでAl板を切り出し,必要以上に強度があったので,穴をずぼずぼ開けて軽量化.
曲げてモータやセンサ基板の仮止め.
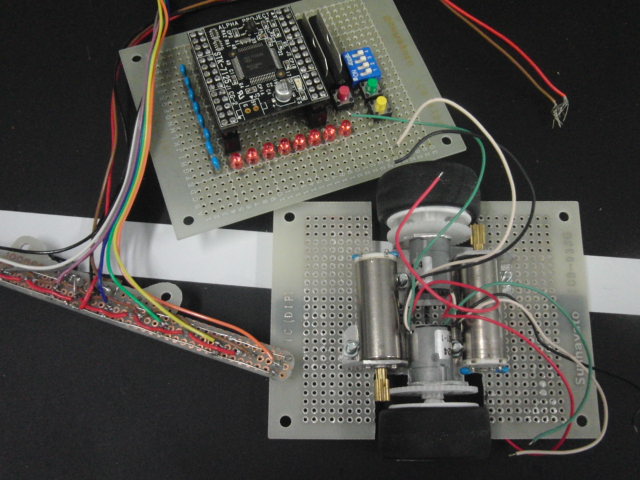
完成イメージはこんな感じ.
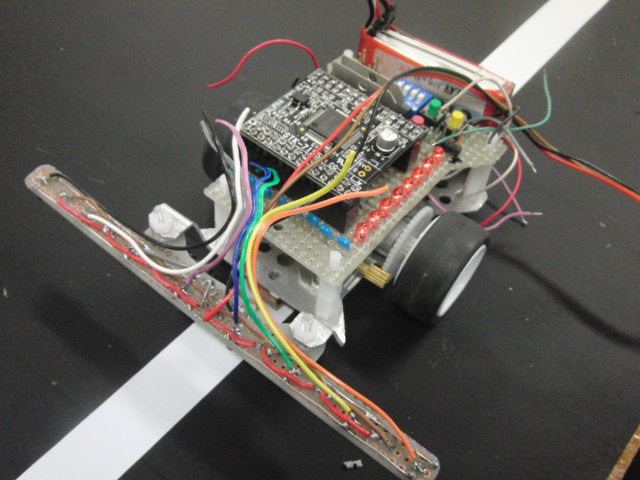
センサの高さや角度はAlを曲げて調整するつもり.
150gちょっとです.バッテリーはもう少し小さくても良さそう.
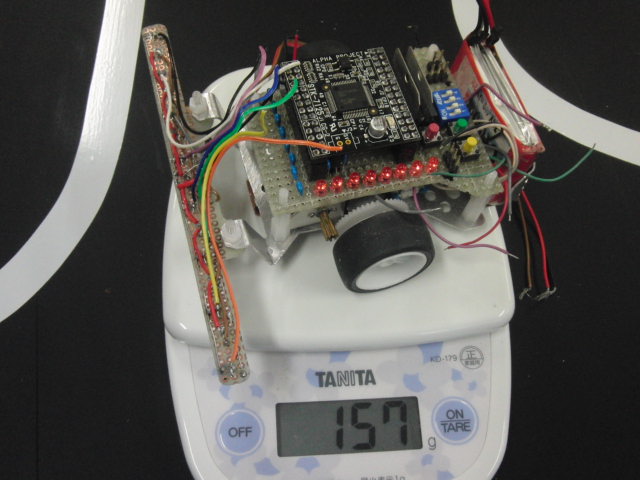
さて,次に時間がとれれば配線してハードは完成できると思います.
重量に比較して強力なモータとバッテリーを積んでいるので,スピードは出そう.
でも問題はソフト.どこまで制御できるのか...
回路にもちょっと不安があったりしますが,考えないことにしておきます.
--追記--
配線完了.
安全のためにモータへの電源スイッチをつけたら重量増になってしまいました.軽いバッテリーに乗せ換えたら146g.寸法はW:135mm,L:110mm,H:35mm(突起部含まず)

ロボトレースの製作その8,ハード完成
ハードウェア機能の確認まで終わり,エンコーダを逆に付けてたりモータを逆に付けてたりしたので修正して,やっぱりTA7291の電圧ドロップ(or内部抵抗?)が大きくてモーターのパワー十分に出なかったりしていますが,とりあえずハードは完成.
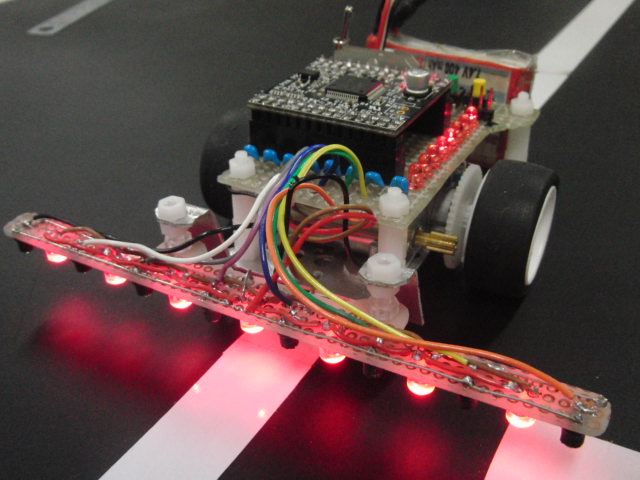
ロボトレース,センサの動作チェックの動画.
A/D変換で読み込み,しきい値を決めて対応する場所のLEDを点灯させています.

 ESP32 Wifi Bluetooth開発ボード |
 Arduino Nano Every |
 Raspberry Pi pico |
 FPGA XILINX Artix-7 |