HOME > ハードウェア
GPSロボットカーのハードウェア
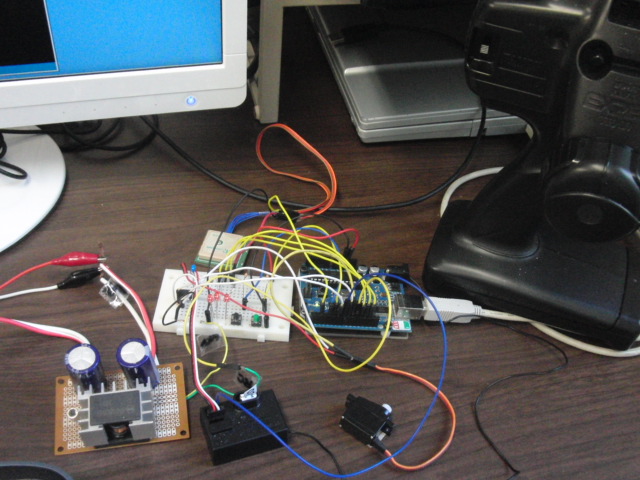
ハードウェア準備中
ソフトの大枠も出来て,ハードと接続して動作確認.
GPSの受信をしながら自動航行のためにサーボとモータを制御.
R/Cで強制割込み操縦.
Bluetoothを使ったシリアル通信でコマンド動作.
あとはユニバーサル基板に組んで,ボートに乗せてプログラムの調整.
できたら実地試験.江津湖か有明海へGo!

 ESP32 Wifi Bluetooth開発ボード |
 Arduino Nano Every |
 Raspberry Pi pico |
 FPGA XILINX Artix-7 |
コンテンツメニュー
- PICとは
- PIC関連リンク・参考書など
- PICの開発環境について
- MPLAB IDE
- HI-TECH PICC-LITE
- CCS社 PCW
- Wingcc
- 秋月PICプログラマー
- 赤外線送受信の実験
- 赤外線送受信(アナログ)
- ステップモータ制御
- PIC16F84Aでシリアル通信
- キッチンタイマー
- RC信号の監視
- プリンタ接続,PC-6021
- ポケコンでAVR
- I/Oとライントレースの実験
- Androidインストールメモ
- iPAQをiPhone風に
- App Inventor
- EKEN M001改造
- Android+Arduino
- 音声認識で動くロボット
- Bluetoothで送受信
- Bluetoothでロボット制御
- App Inventorサンプル
- App Inventorサンプル2
- RT-ADK/ADS
- Arduino+USBホストシールド
- ProcessingでAndroidアプリ
- ICカード分解(ETCカード)
- 赤外線リモコン受信モジュール
- PC9801(98note)分解
- 超音波加湿器の実験
- マイナスイオン発生器
- 回り続けるコマ
- 超音波小型カッター
- 電子レンジ用途外の使用
- 赤外線LEDの発光を確認
- 携帯テレビの延命措置
- 板金機とハンドプレス
- Edyカードの分解
- 100均のハトメで工作
- オープンキャンパス
- バスパワーメーター
- 3Dセンサモジュール
- マイクロシリアルサーボjコントローラ
- コアレスモータの結合
- レーザ式測域センサ
- GPS受信
- 掃除機分解
- アリの巣
- BSアンテナの分解
- サーボモータの実験
- 秋月のGPSモジュール
- 圧電振動ジャイロ
- 電子秤の分解
- 自分でエアコン洗浄
- 3角形のドライバー
- 動物撃退装置
- ホール素子,磁気センサ
- コテ先クリーナ
- 振動モータの分解
- PIXUS 50i 修理
- 磁気テープの磁性体を剥がす
- 1人前水出しアイスコーヒーの作り方
- CF-LV1のSSD換装
- AKI-H8 3048F メモ
- H8タイニー(3664)メモ
- 3664でLCD表示
- H8TinyでA/Dの実験
- H8TinyでPWMの実験
- μITRON
- H8で超音波センサの実験
- AKI-H8用書込みスイッチ
- 昔作ったマイクロマウス
- プロッタプリンタ
- ラジコングライダー
- KIROBO
- インドアプレーン
- 即席ラジコンボート
- IJEロボコン2008
- プリント基板露光器
- プリント基板作製
- SUMO MAN
- 大人の科学4ビットマイコン
- EAGLEでガーバー出力
- EAGLEの使い方メモ
- Gainer mini
- 金属探知機の自作
- 簡易カーブトレーサTr専用
- タイマーコンセント
- 8x5,8x8フォントエディタ
- VBでRFIDタイムスタンプ
- 卓上ファンの自作
- LED Cube (3x3x3)
- 自作3Dシステム
- 卓球マシンを循環式に
- CNCで基板加工
- 加速度をBluetooth送信
- くるくる飛行体
- スマートLCD
- ラジコン飛行機でFPV
- 反応速度を測るシステム
- 軽量なGPSロガー(16g)
- エフテック社のキット
- 製作前のあれこれ
- テスト用迷路の製作
- 回路試作
- ハーフサイズマウスの製作
- モータ駆動テスト
- センサを使った走行
- 左手法,拡張左手法
- 最短走行
- 競技に向けて
- おまけ,タイム自動計測
- マイクロマウスクラシック
- Pi:Co
- DCマウス
- 教材用マイクロマウス
- ITRONでマイクロマウス
- Arduinoでマイクロマウス
- mbedでマイクロマウス
- ブレッドボードでArduino
- Arduino書込機の自作
- Arduinoで温度計測
- Arduinoで倒立振子
- AVR超入門
- AVRをシリアルポートで書込み
- Arduinoで低周波発振器
- Arduinoで簡易オシロ
- AVRオシロスコープ
- 8x8LED電光掲示板
- AVR ISP抵抗値どこまで
- 物理実験用簡易計測器
- Metaboard
- V-USB
- アナログ文字入力表示装置
- さいもじ
- V-USBでHIDデバイス
- ArduinoでRFID
- ArduinoでFeliCa
- 超音波レンジファインダー
- Ethernetシールドメモ
- 移動ロボプラットフォーム
- 太陽光追尾装置
- SMSモニタリングシステム
- 微弱無線モジュール
- 1対多シリアル通信
- LEDデジタル時計
- SMS受信forPC
- 残像LEDディスプレイ
- RFIDで計測
- 微弱無線モジュール
- Arduinoの演習
- Da Vinci 32U
- DaVinciで外部割込み4本
- ボール&ビーム制御実験
- 気圧センサLPS331AP
その他の情報
関連リンク
(荒れたら消します)
(確認頻度低いです)