自律飛行機(デルタ翼)
6軸センサ(3軸加速度センサとジャイロセンサ)の実験用に、飛行機製作
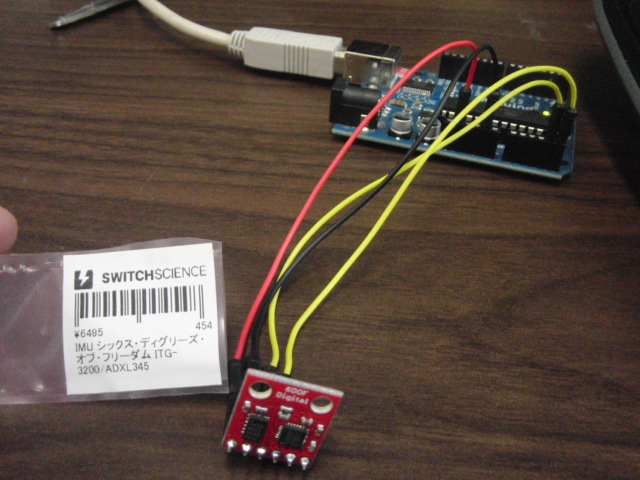
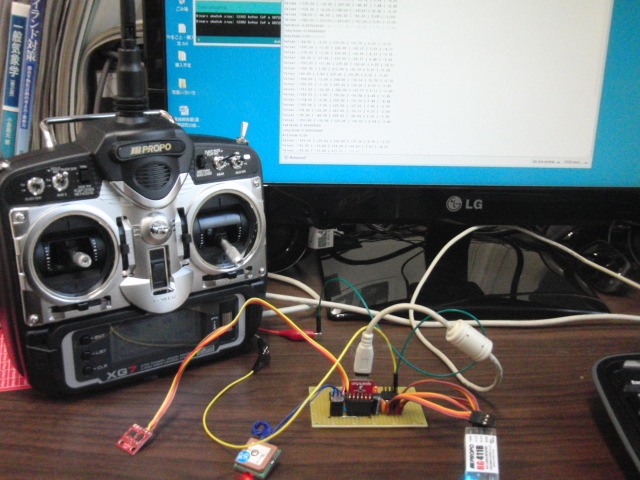
計6軸センサ(3軸加速度センサと3軸ジャイロセンサ)が一緒になった、シックス・ディグリーズ・オブ・フリーダムというのを入手しました。
ArduinoでI2Cで読み取り中↓
参考URL:
http://bildr.org/2012/03/stable-orientation-digital-imu-6dof-arduino/
これを使った何か、ということで制御が分かりやすそうな飛行機を急きょ製作。
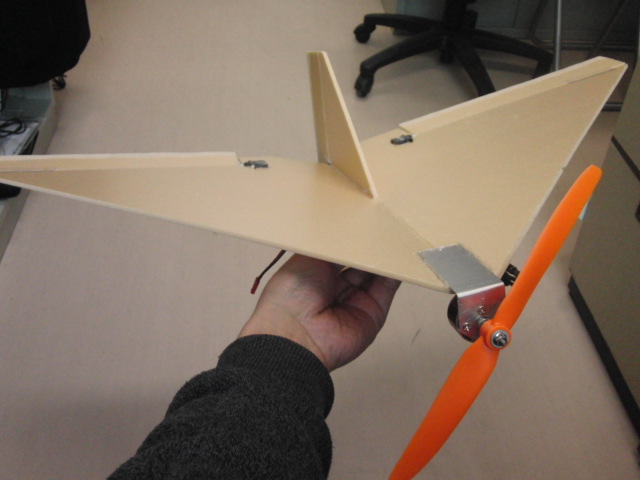
せっかくなので別の用途で使い回しがきくように、立つように作りました。
まず、飛ぶかどうかだけ試したら飛びました。ただし、重量(重量192g)に比べて小さいので速いです。板貼りつけて作っただけなので操縦が難しいです。モータやめて、まずはグライダーとして制御してみようかな…
-追記-
その動画を追加しました→ 即席デルタ翼機初飛行(強風中)
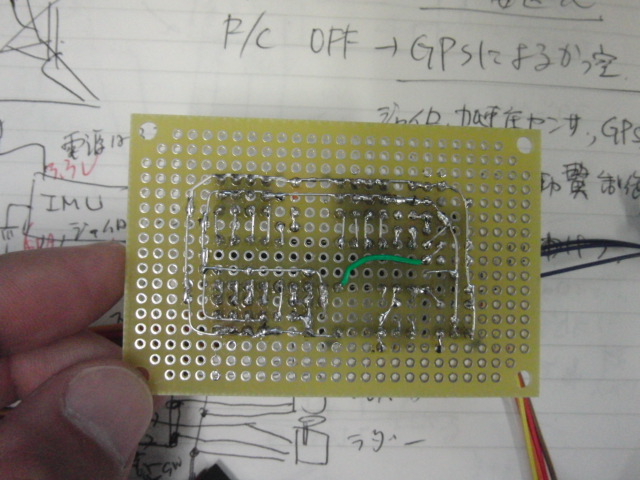
デルタ翼機の自律飛行の基板
デルタ翼機の自律飛行の基板を作りました。ラジコンの受信機の信号をいったんマイコンを通してサーボに伝えます。R/C時も6軸IMUのジャイロを使って安定化、自律飛行時にはGPSの位置情報によって制御できるようにするつもり。
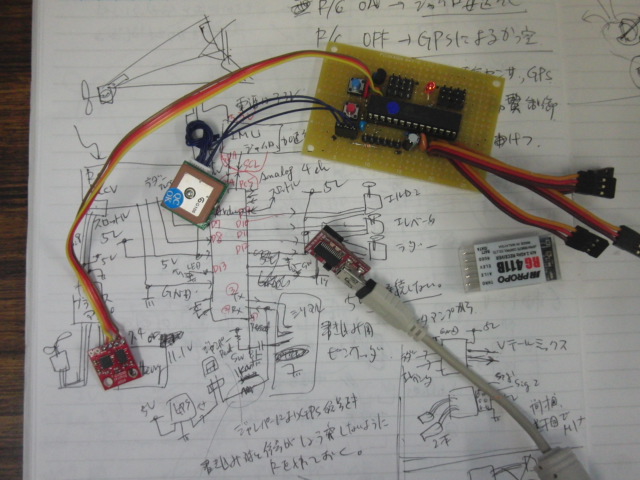
裏面はこんな感じ、部品配置を考えながら作ったので、わりとすっきりした配線でできました。
こんな感じでソフトウェア開発。
デルタ翼機のIMUによる安定化
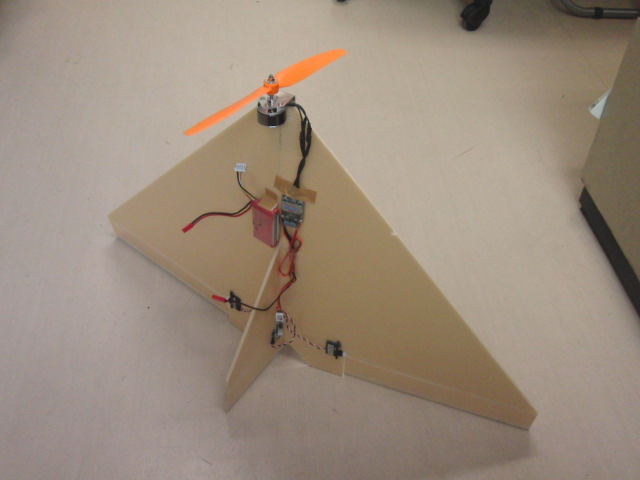
6軸IMU(3軸加速度と3軸ジャイロセンサ)による安定化をさせるために、デルタ翼機に組み込んでみました。(自律飛行のためGPSも搭載しています)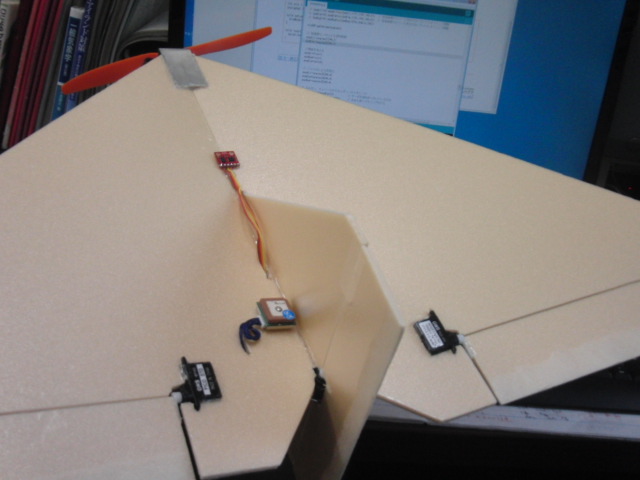
裏から見たところ↓
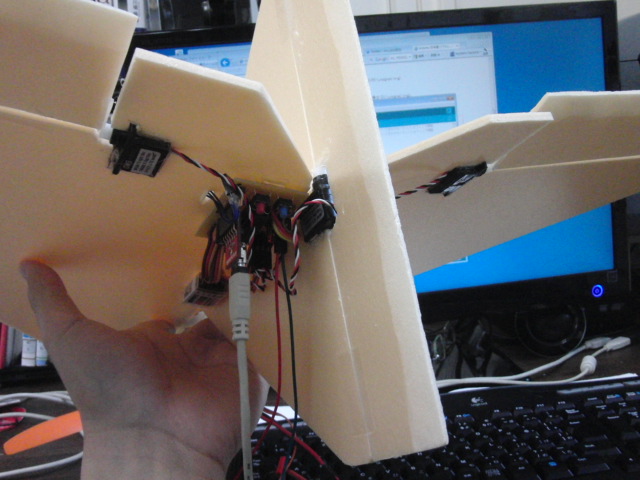
傾けたり揺らしたりして、動作確認したら制御はかかっているようです。
その動画ー> デルタ翼機、IMUによる安定化のテスト
次に、手投げで滑空させてみました。翼面荷重が大きいので伸びませんが、まっすぐ滑空してくれました。
その動画ー> デルタ翼機、IMUで安定化して滑空テスト
受信機の4chの信号をマイコンで取り込もうとすると負荷がかかりすぎて(パルス幅計測待ち?)サーボがばたつく現象があり、ラジコン操縦はまだやってません。
解決策探し中の参考URL↓
http://www.arduino.cc/cgi-bin/yabb2/YaBB.pl?num=1254958909 http://diydrones.com/profiles/blog/show?id=705844%3ABlogPost%3A38393&commentId=705844%3AComment%3A38978 など。
デルタ翼機、R/Cとマイコンによる自動操縦切り替え
ArduinoでR/Cとマイコンによる自動操縦の切り替えをしてみました。R/C信号をpulseIn関数で連続で監視するとサーボがバタつくので、100ms毎に割り込みでR/C信号を監視するようにしたらバタつきはなくなりました。
R/Cのレスポンスが0.1秒遅れますが仕方ありません。
R/Cの送信機側のスイッチを切ると自動操縦(今は安定化した水平飛行)に切り替わります。
R/Cによる操縦より、自動操縦優先でパラメータを決めました。
その動画→デルタ翼機、R/Cとマイコンによる自動操縦切り替え
まだまだ続きます・・・

 ESP32 Wifi Bluetooth開発ボード |
 Arduino Nano Every |
 Raspberry Pi pico |
 FPGA XILINX Artix-7 |