2重反転による球形飛行体
ベースの製作
二重反転ブラシレスモータの取り付けに風車のようなベース。こんな感じで、現物あわせてで板金加工。

発泡スチロール板をクロスした部分に取り付けます。
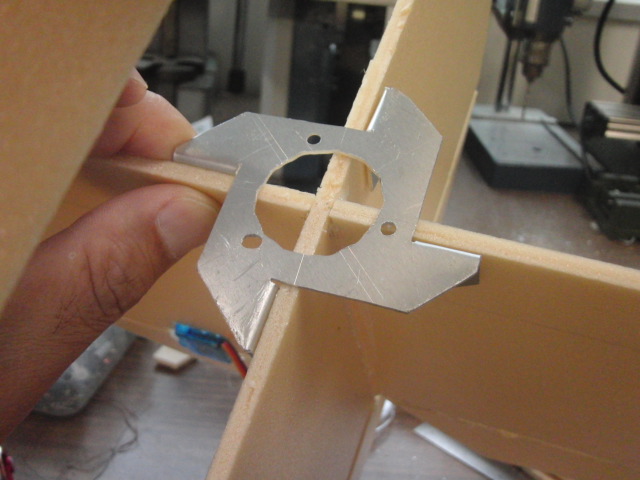
モータは中間の3個の穴で固定。上下が反対に回ります。

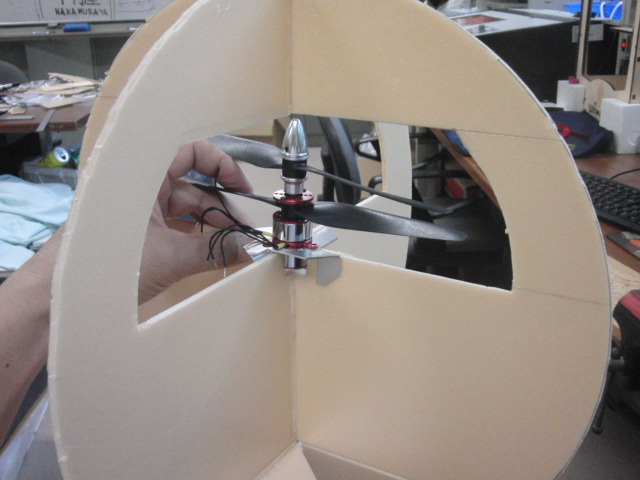
発泡スチロール板を少し掘り下げて、こんな感じの完成イメージ。
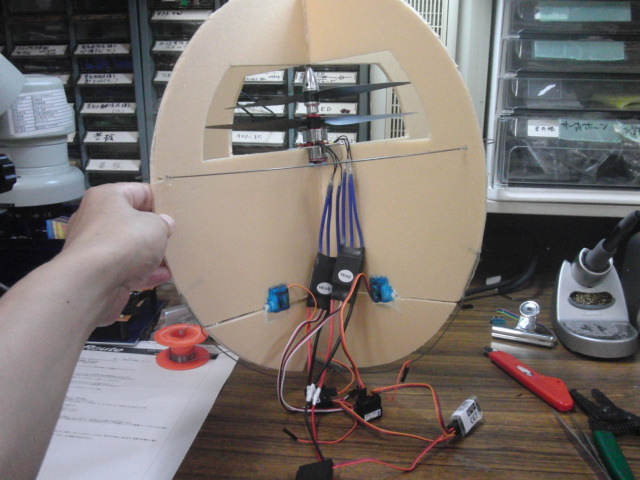
本体の製作途中経過
製作中。メカ固定すればすぐ、早ければ明日にでも飛ばせると思います。
この形で安定して浮くかどうかは重心位置と機体のバランスしだい、ジャイロも3個積んで安定化させますので、多分大丈夫でしょう。
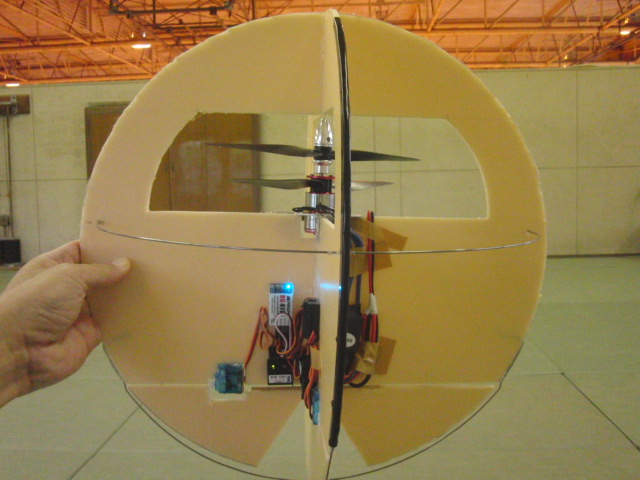
機体完成
R/Cで飛ばせます。とりあえず浮かせただけのテスト動画。
設定間違ってたところがあったので、操縦はできてませんが、ふわっと浮いて、操作に対するレスポンスは、普通にあります。
3セル800mAhのリポを積んだ状態で320g、バッテリーなしだと250g。
11.1V、5.6A(7C,62W)でホバリングしてましたので、飛行時間は理論値で8.6分ほど飛べる計算になります。
7.4V,7.2A(52.3W)でも浮いたので、この機体では2セルの方が効率が良さそうです。
制作費はプロポを入れても5万円弱くらい。
念の為に言っておきますと、自転もできることから対称性を最重要視し、プロペラのガードと尾翼の保護から行き着いた形状ですので悪しからず。
飛ばしてみたら・・・
ビュンビュンとはいかないものの連続で飛ばしてみた。その動画
二重反転ペラによる飛行体。現在は、
スロットル、エルロンー>モーターアンプ
ラダー、エレベーター>尾翼
で操縦しています。
スロットル、エルロンは送信機によるミキシングをかけてそれぞれのモータに力を配分していますが、ジャイロの信号はエルロンにしか入れていません。なので、ロールの安定化がかかろうとすると片側のモータのみ回転が変わるので上昇または下降も同時に入ってしまいます。
Vテールミキサーがあれば(今持ってない)1つのジャイロを両モータに分配できるので、ロールをもっと安定化させることができ、そうしたらびゅんびゅん飛ばせるようになると思います。
普通は垂直に安定で、尾翼を切ると斜めになって横に飛ばせます。
今の状態は重心が低すぎるので、斜め飛行からの回復を急に行うとお尻が振れます。
飛行時間を測るために連続でふらふら飛ばしてました。この前に1分弱飛ばしてるので、800mAh3セルリポで計9分弱は飛ばせそうです。
基本的には安定してるので、マイコンと9軸IMUを積めば上手く自律化出来るんじゃないかと思います。
いちおう完成!
贅沢に、プロペラ2個にそれぞれジャイロを組み込んでロールの安定をはかりました。これで思った通り飛ばせるようになりました。
2重反転による球形飛行体
これでいちおうR/Cの飛行体としては完成!
(マイコン搭載による自律化については別にまとめます)
おまけ、故障と修理
普通に回してただけですが、異音がしだしたので調べたら、固定部分が1箇所ポッキリ折れてました。

断面を見ると接続部分はほんの少し。設計に問題ありな感じもありますが、軽さとパワーを追求した商品だからギリギリのところなんでしょう。
取り付けやネジの緩みなどで一部に力がかかったり振動のストレスをかけてしまったのかもしれません。

交換も修理も無理だと思いますので、接着してみました。
これじゃ回らないんじゃないの? って思われますが。

ベタっと着いてたのは、実はエポキシの硬化の保持用にホットボンドで止めていたもの。 いったん形が決まったら、ホットボンドをはがして、接続部分にモリモリにエポキシを再充填。これでなんとか固定できるでしょうか…?

1日たったので、組み上げて回してみました。強度的に不安はありますが、固定はできたようです。
しかし、先の方のプロペラの振動が大きく軸ブレもひどいです。多分これも異音の要因だったようです。回しているうちにどこか緩んだのか、軸ブレも根本が折れた原因かもしれません。
分解修理しようとしましたが、軸が打ち込んであるようでキツく、抜けません。無理すると余計悪くしそうなので、簡易的な対処を考えて、セロハンテープでプロペラのバランスを取ってみました。すると、振動が収まったので、今後はできるだけ低回転で使うことにします。
広告↓

motorTmazo二重反転 ブラシレスモーター EDCR-221613d

 ESP32 Wifi Bluetooth開発ボード |
 Arduino Nano Every |
 Raspberry Pi pico |
 FPGA XILINX Artix-7 |