ロボトレースの製作前準備
ロボトレースの製作その2,センサの考察
他の方のロボットを見るとセンサは基板の裏側に下向きに取り付けられているのが一般的なようです.センサはアナログ,デジタルどちらもありのようですが,デジタルにすると読み取りが簡単で確実な半面,しきい値調整用のボリュームが必要になります.
一方,Ng Beng Kiatさんのページ(http://www.np.edu.sg/alpha/nbk/)で,Micromouse->Ning3 を見ると,センサが本体より崎に出て前を向いています.
これでラインがちゃんと認識できるのかが疑問で,実験してみました.
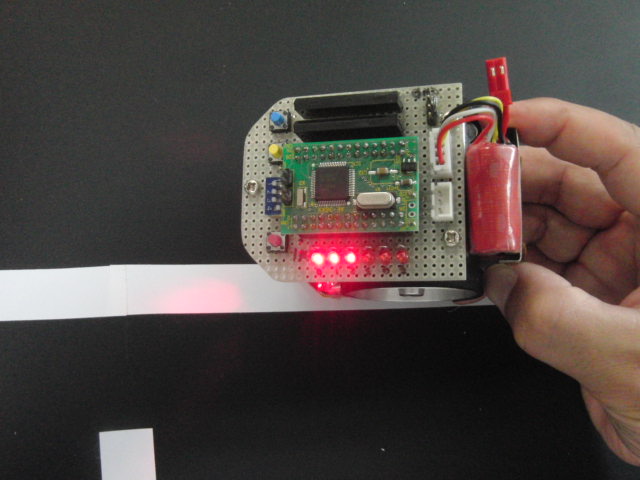
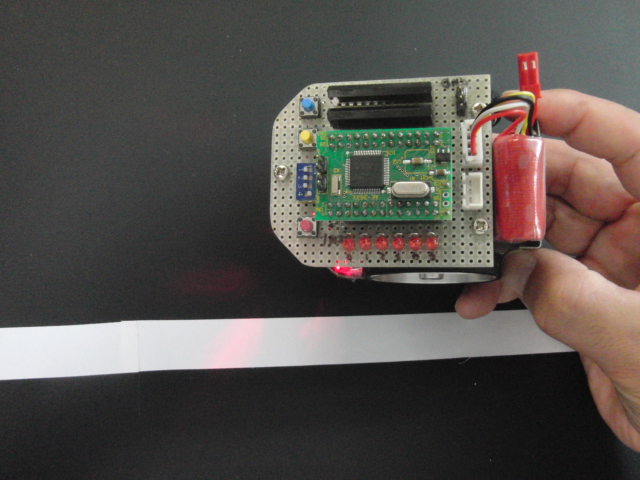
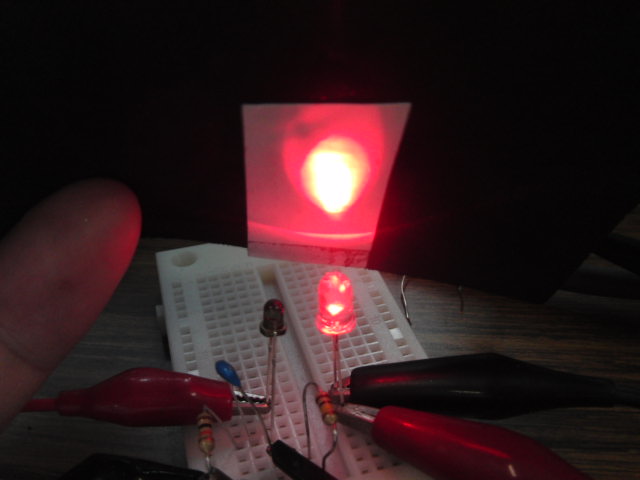
前に作ったマイクロマウスの左前の赤色LEDによる反射型のアナログセンサを使って白線の読み取りを行ってみました.以下写真2枚はマウスを少し持ち上げ,斜めに白線に光を当てて白線の検出をしています.
白線上の場合↓
白線外の場合↓
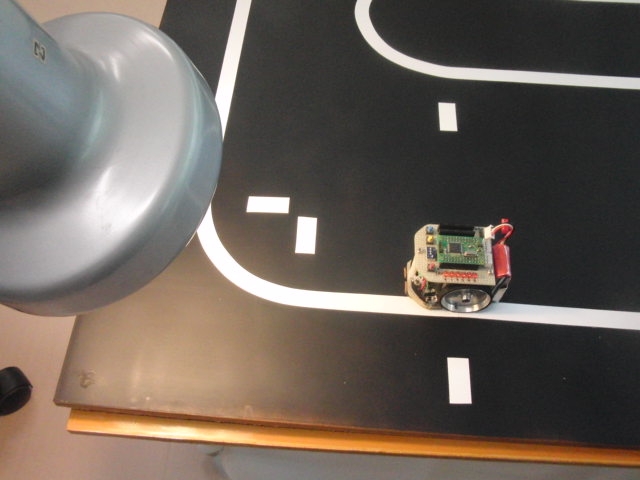
周囲の明るさについては,白熱電球なら至近距離で当てても影響ありませんでした.
というわけで,マウスで使った回路をそのまま利用しても良さそうですし,至近距離なのでOPAMPも省略していいかもしれません.(アンプとボリュームの在庫もないので好都合!)
こんな感じで手持ちの部品で作ってみることができそうです.
ロボトレース用光センサの実験の動画
ロボトレースの製作その3,センサの考察の続き(追記あり)
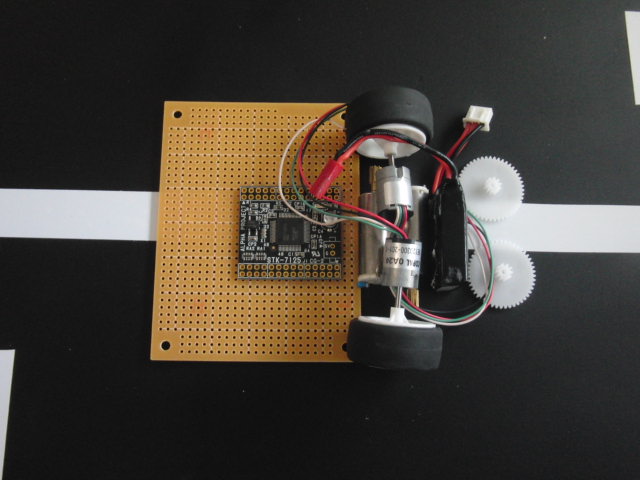
テスト回路はこんな感じで簡単に.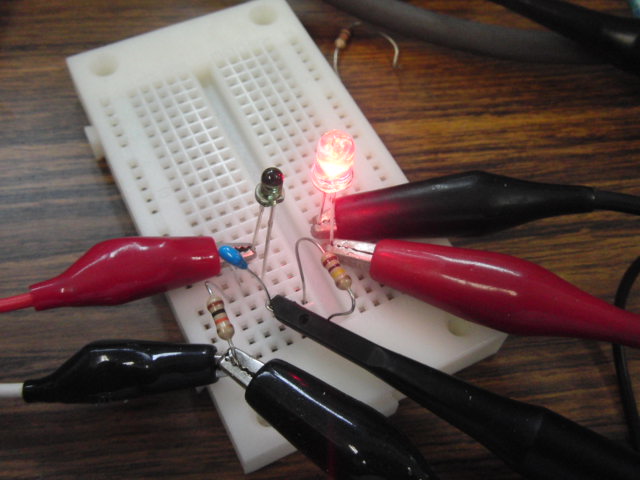
フォトトランジスタを横に並べてアナログ値でラインの位置検出をしようと思ったのですが,スポットが小さくて検出範囲が狭すぎるので...
カットして磨いてみました.研磨は歯磨き粉使用.

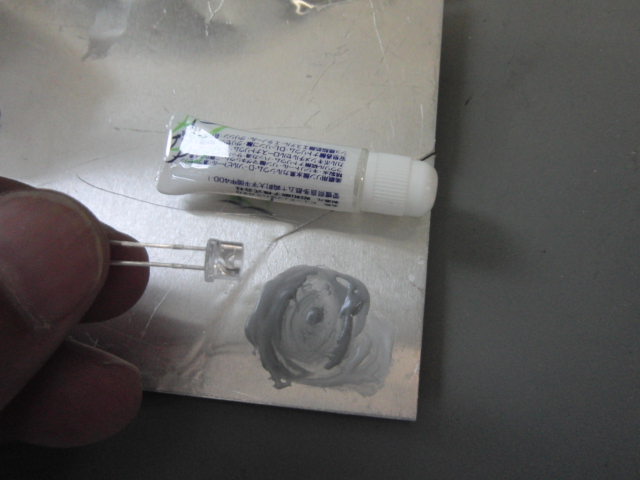
無指向性の光源になりました.想定どおり!

--追記--
これだけ作りました.

--追記2--
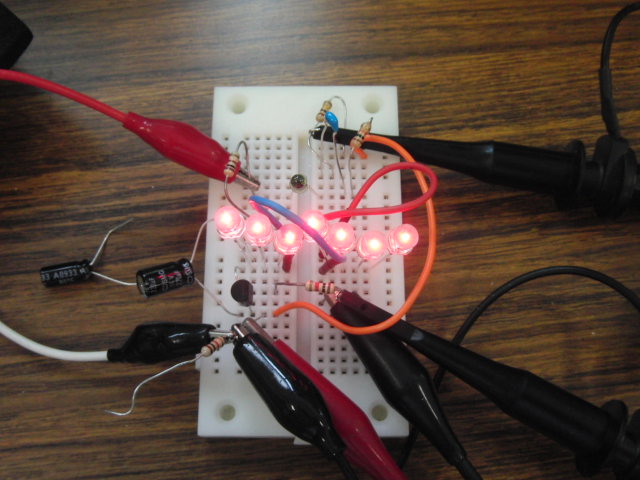
LEDを7個同時に点灯する回路のテスト.
全部並列でも問題なく点灯.
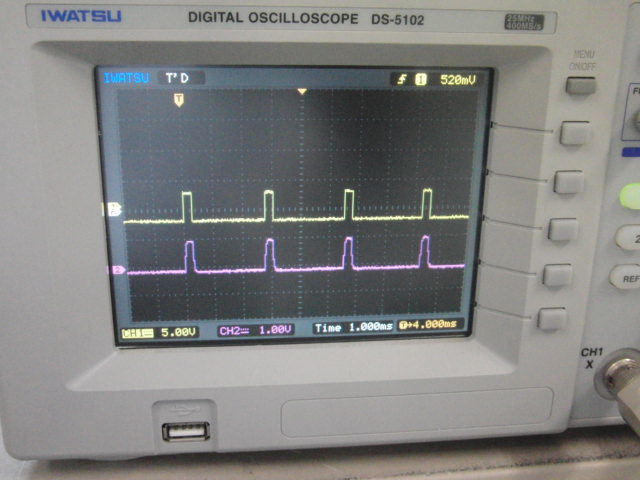
波形:前に白い紙を置いたとき.
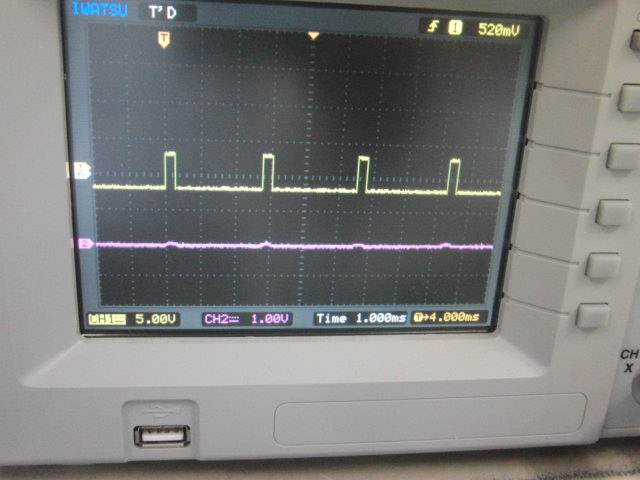
波形:前に何も無いとき(横からの光を受けて小さな信号がある)
広告↓

【送料無料】ライントレースロボット入門

 ESP32 Wifi Bluetooth開発ボード |
 Arduino Nano Every |
 Raspberry Pi pico |
 FPGA XILINX Artix-7 |