KHR-1HVでマイクロマウス
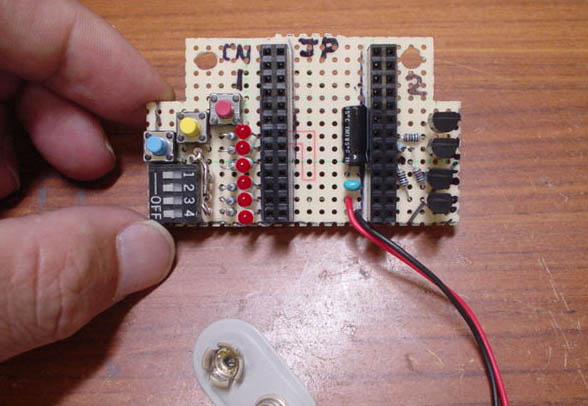
KHR-1HVでマイクロマウス競技に挑戦! KHR-1HVの自律化基板の製作をしました.DIP-SWで手ごろな大きさのものが無かったので強引にカット.

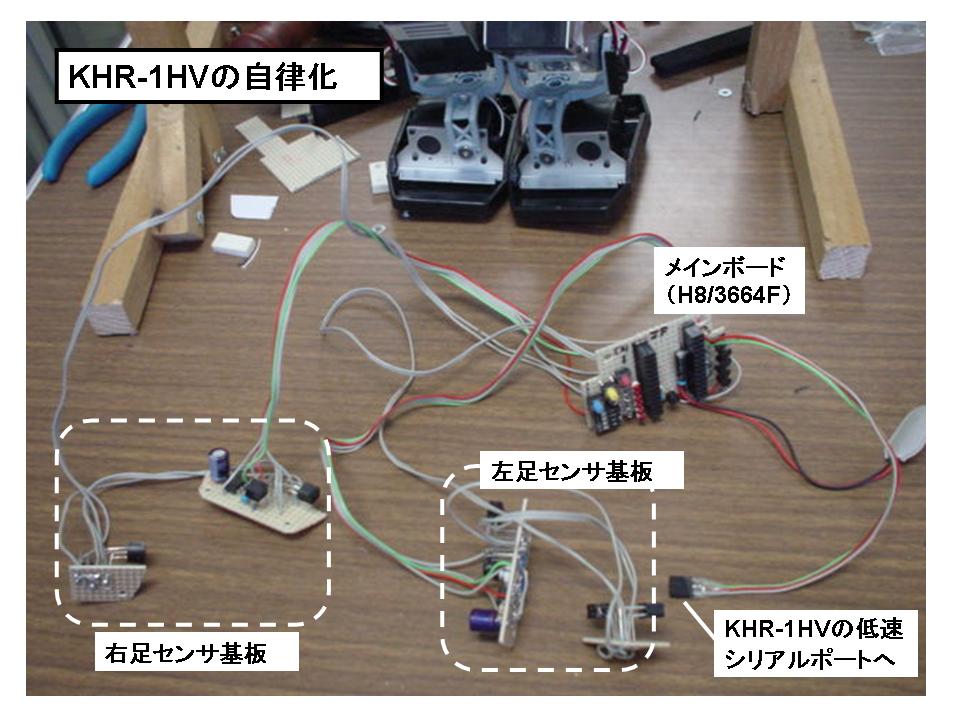
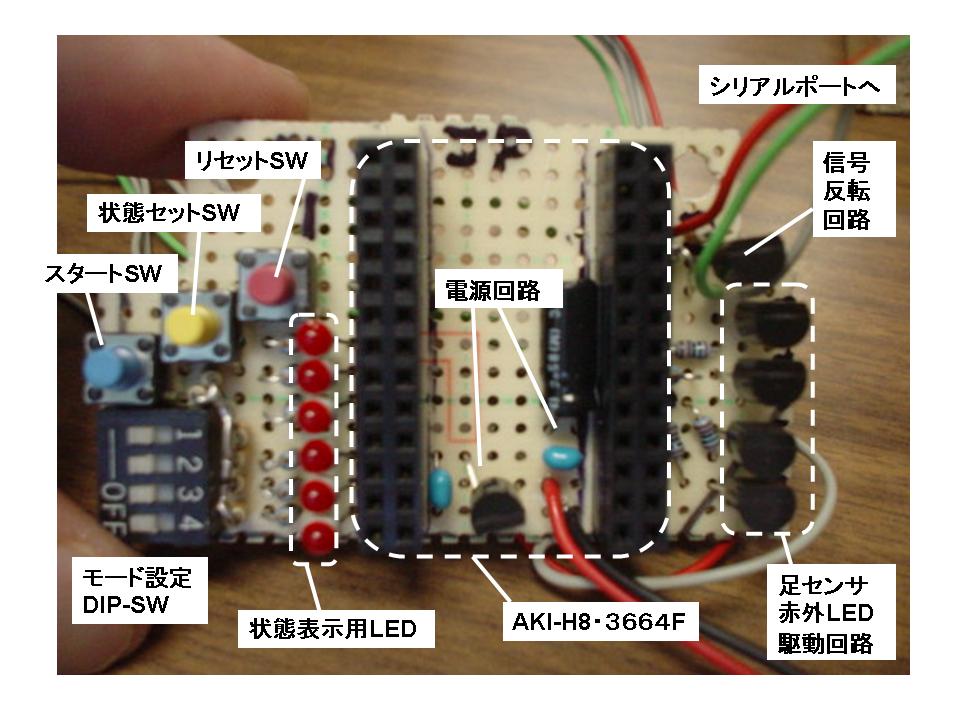
作った基板.メイン基板の回路構成は,モータ駆動回路を省いてハーフサイズ マイクロマウスの回路とほとんど同じです.
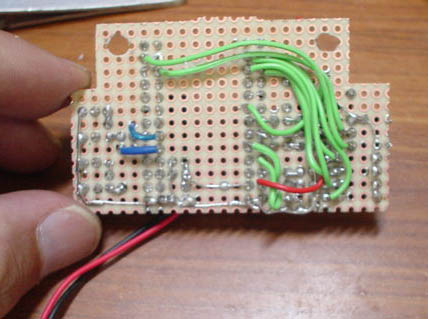
基板の裏面.
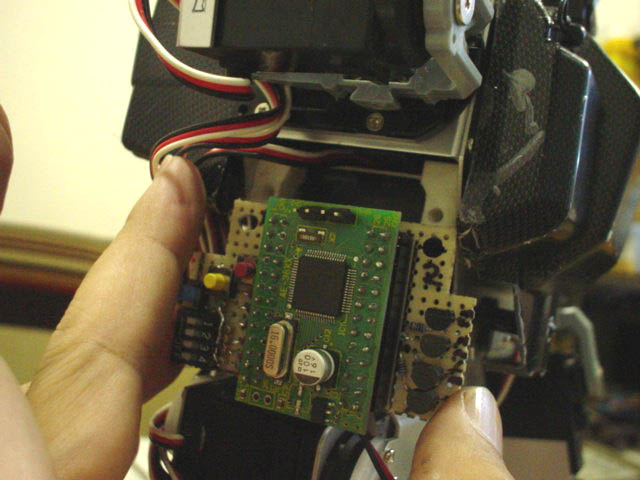
右脇に仕込みます.固定用の部材も着けました.
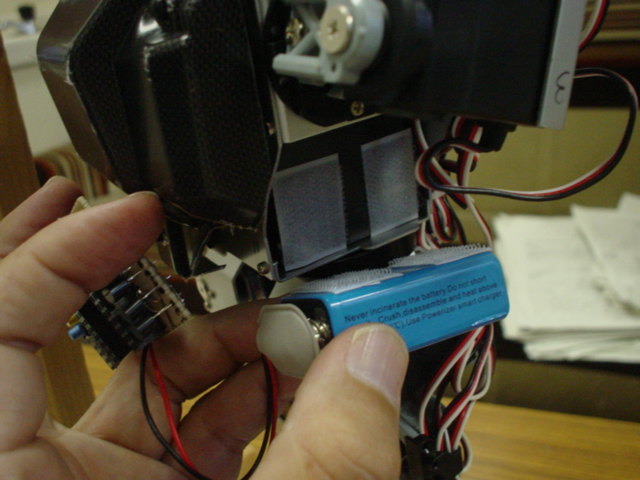
電池は左脇.マジックテープで取り付けます.
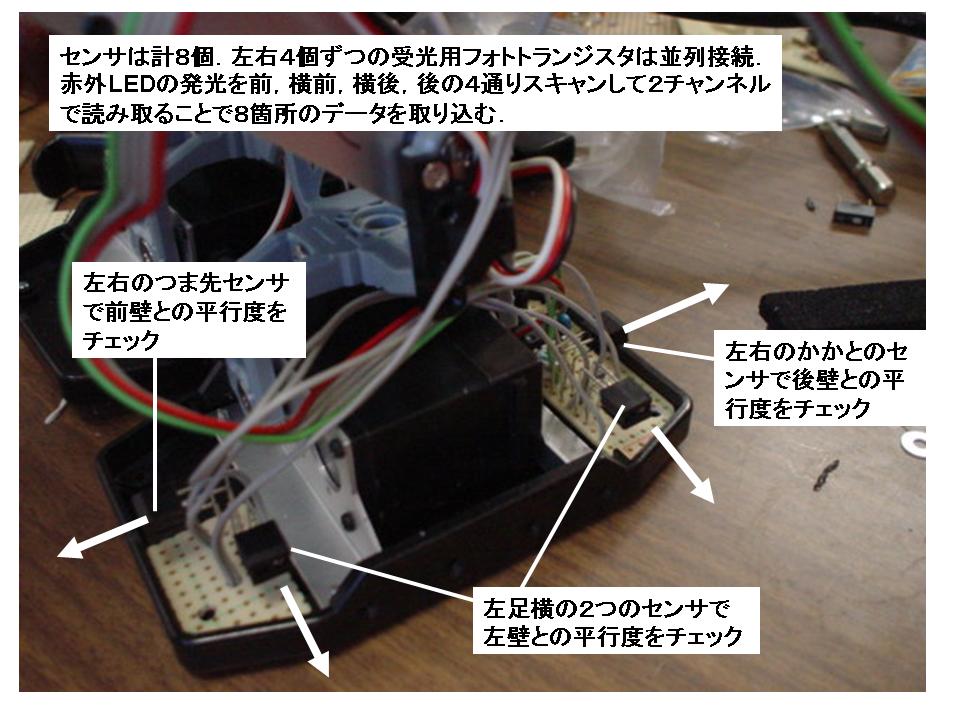
左右の足にセンサを計8個つけました. メイン基板は右脇,左右の足に直接配線を渡すのも不恰好なので,センサを 並列化しました.多分大丈夫だろうと思ってテストなしに回路を作りましたが, 動かなかったら書き直します.
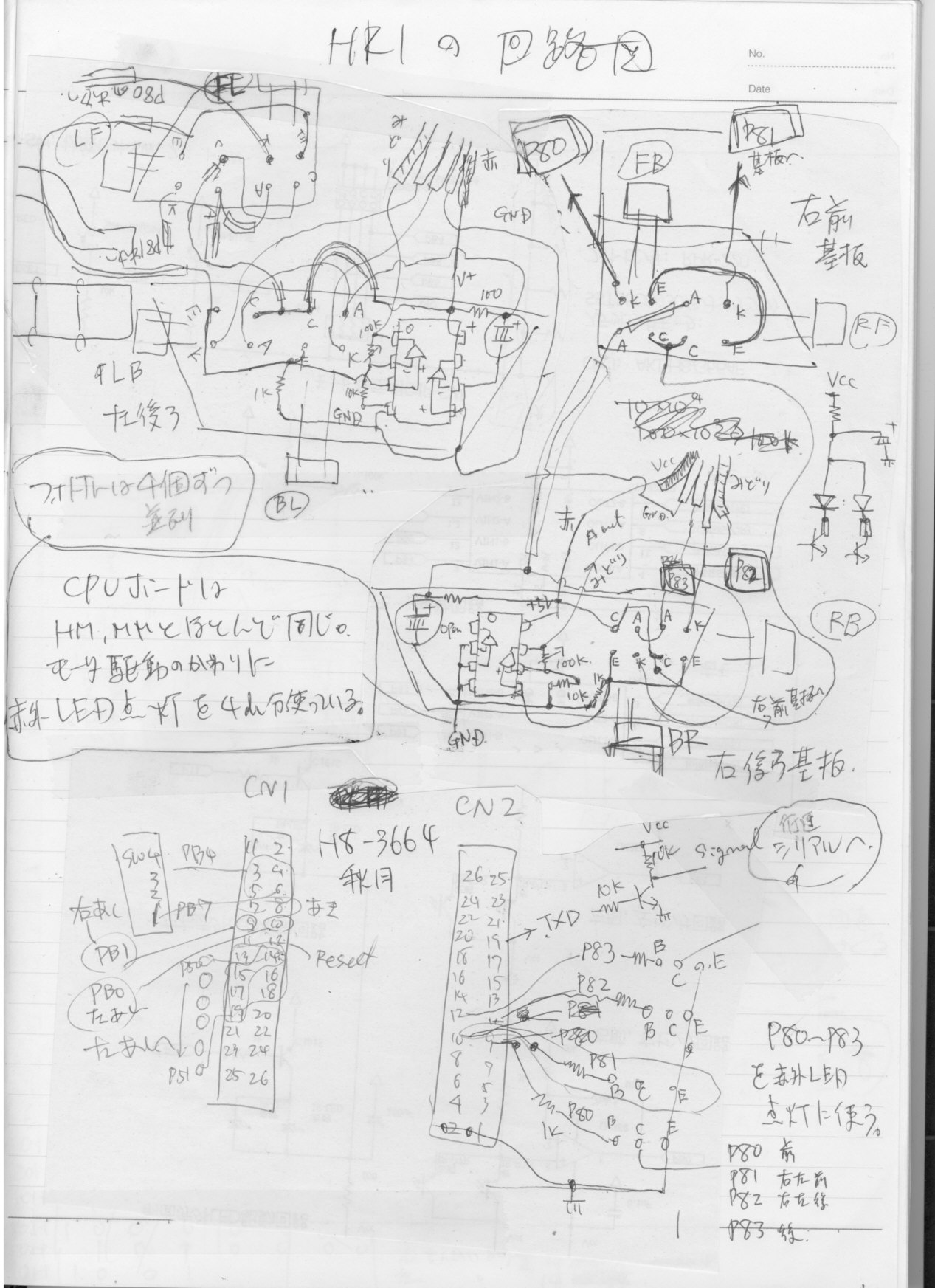
回路図
モーション作成
KHR-1HVで一区画前進させてみました. 歩くたびに誤差が出ます.どうやら足裏の滑り具合と, ジャイロセンサの補正が誤差の原因になっているようです. ジャイロは転ばないためにはいいですが,どの程度補正がかかるかは きまってないので,補正は最小限にかけて使うことにします.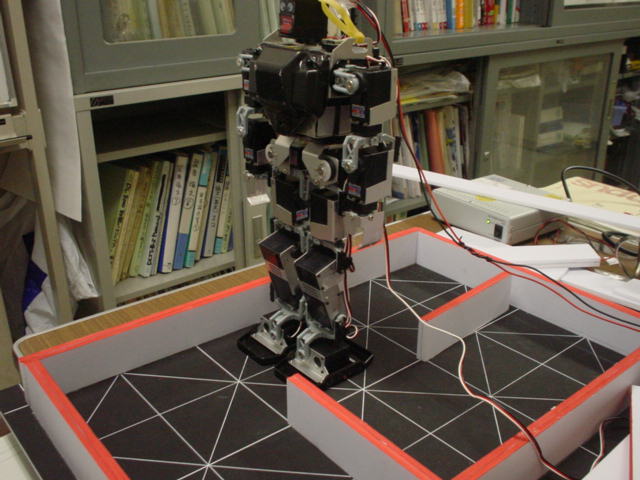
1区画前進の動画.
更に,後退,左サイドステップまで. サイドステップはかなり誤差でます.
1区画後退の動画.
1区画左サイドステップの動画.
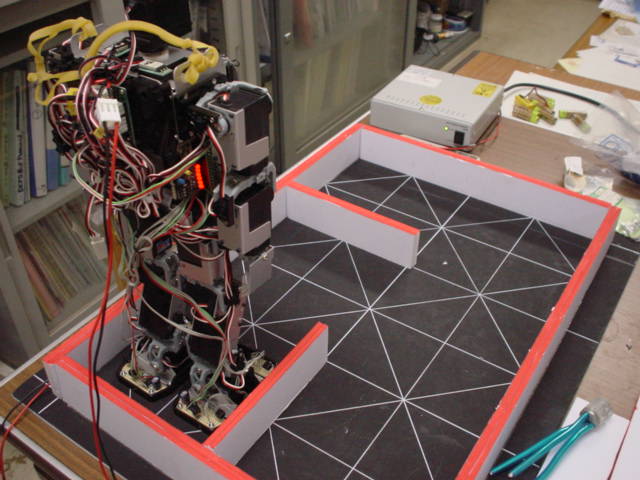
自律化したKHR-1HVにマイクロマウスのテスト用迷路を歩かせてみました.
モーションが不完全なのと,一部バグもあるようなので,
サポートしながら歩かせている動画です.
16×16迷路での歩行↓
KHR-1HVで迷路歩行
動画をご覧になれば分かるように,まだまだです... マイクロマウス九州地区大会に出場し,5-6区画歩いたところで倒れそうに なってリタイヤしました.
悔しいので,再調整して全国大会に出場するつもりです.

KHR-1HVパーフェクトセット

 ESP32 Wifi Bluetooth開発ボード |
 Arduino Nano Every |
 Raspberry Pi pico |
 FPGA XILINX Artix-7 |