2024年マイクロマウス九州地区大会
2024年マイクロマウス九州地区大会の暫定ページが公開されました。
第33回(2024年)マイクロマウス九州地区大会のご案内
中の人は、これから、学校や、会場予約や、主催、共催に書類を作って出してお願いしたりして、いろいろ大変のようです。
第33回(2024年)マイクロマウス九州地区大会のご案内
中の人は、これから、学校や、会場予約や、主催、共催に書類を作って出してお願いしたりして、いろいろ大変のようです。


固定傾斜ローター式カイトプレーン
昨年から製作してて初公開です。
以前のカイト付きマルチコプタとどこが違うかというと、これはスカイリモートさんのカイトプレーンのオマージュで、水平飛行に入ったら斜め前方推力のカイトプレーン。
効率は斜め推力の分ちょっと悪くて理想的な場合でホバリング時の2/(√3+L/D)の電力で飛行。
それでも通常のマルチコプタよりは断然省電力。
以前のカイト付きマルチコプタとどこが違うかというと、これはスカイリモートさんのカイトプレーンのオマージュで、水平飛行に入ったら斜め前方推力のカイトプレーン。
効率は斜め推力の分ちょっと悪くて理想的な場合でホバリング時の2/(√3+L/D)の電力で飛行。
それでも通常のマルチコプタよりは断然省電力。
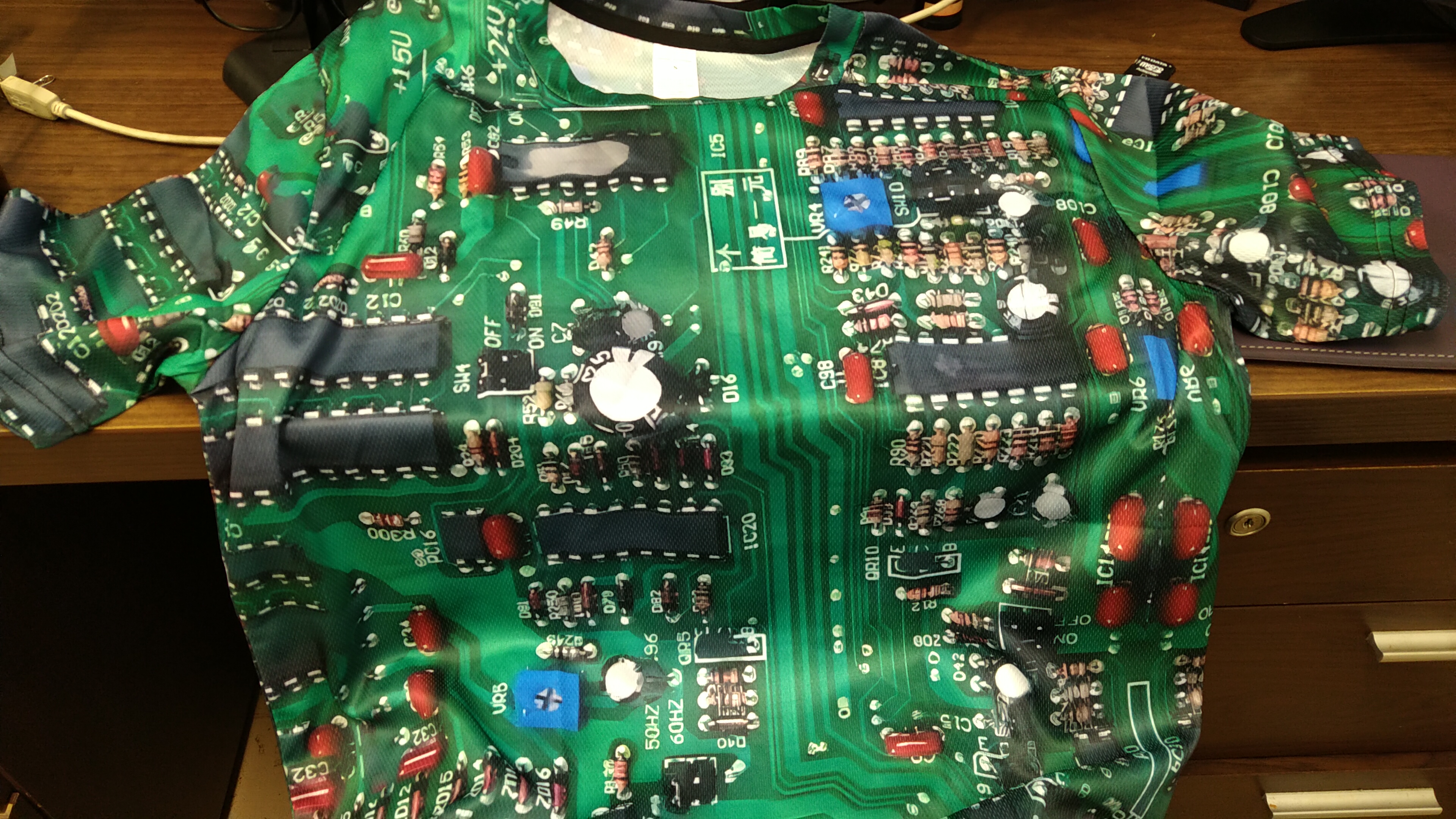
回路基板Tシャツ
なんだか派手なデザインのTシャツを頂きました。

電子部品の載った回路基板のTシャツです。
卓球のチームの練習に着て行ってみました。
他人の来ているTシャツのデザインにはあまり関心ないようです、理系じゃないとピンとこないかも。
練習終わりに、製造業の会社社員の方に、自分は恥ずかしくて着れない、と言われました。
aliexpressとかTemuで買えるようです。
amazonにも似たようなものはありますが、1桁高いです。
回路基板3DプリントTシャツ
電子部品の載った回路基板のTシャツです。
卓球のチームの練習に着て行ってみました。
他人の来ているTシャツのデザインにはあまり関心ないようです、理系じゃないとピンとこないかも。
練習終わりに、製造業の会社社員の方に、自分は恥ずかしくて着れない、と言われました。
aliexpressとかTemuで買えるようです。
amazonにも似たようなものはありますが、1桁高いです。
回路基板3DプリントTシャツ
センサ・ケーブルの防水処理
先日の水温センサケーブル、水中に入れて、水深と水温の関係を測ろうとしたのですが失敗でした。
原因は、ケーブルに浸水してました。
これが、センサを取り付けた付近だけでなく、1mのセンサ間の50㎝位のところで切ってもしっかり浸水してる。

まさかと思って、ケーブル自体の浸水を疑って、しばらくぬるま湯につけてました。
さすがにケーブル自体が水を通すことはなさそう。
カタログ的には耐油性がある、と書いてあるし。

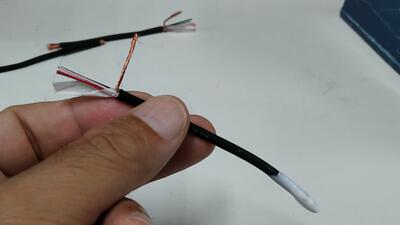
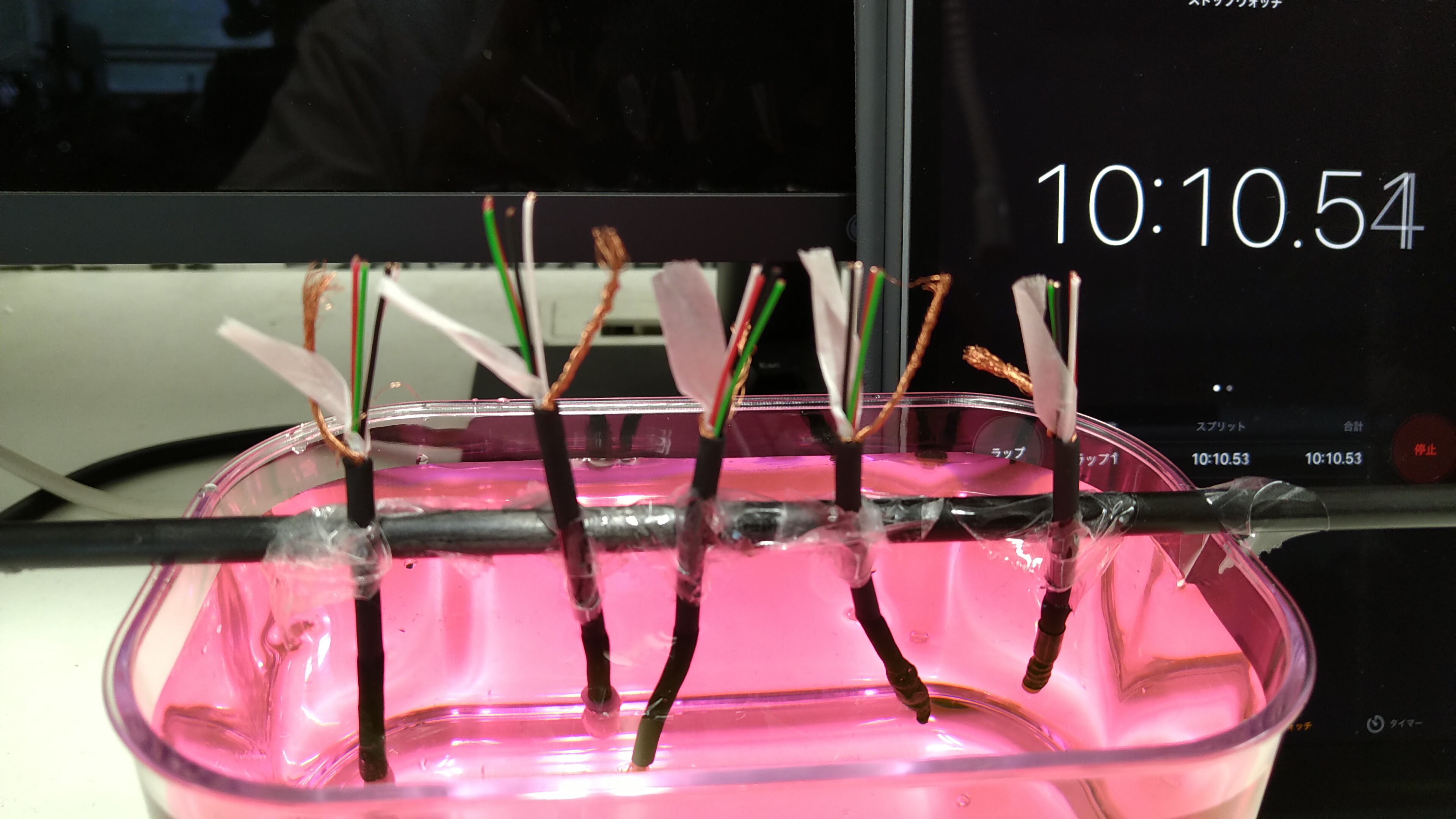
やっぱり先端の処理に問題あるだろうということで、いくつか試料を作成。
エポキシ樹脂封止、ホットボンド、自己融着テープ、熱収縮チューブ。

インクで色を付けた水に入れました。
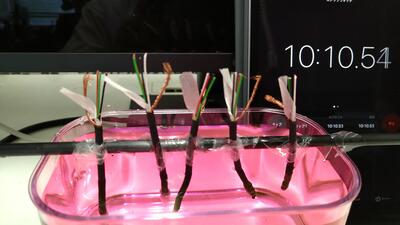
何も処理してないものも比較に入れると、数分で水が上がってきました。
未処理、熱収縮チューブはすぐに浸水。
ほか、エポキシ樹脂封止、ホットボンド、自己融着テープは一晩たっても浸水なし。

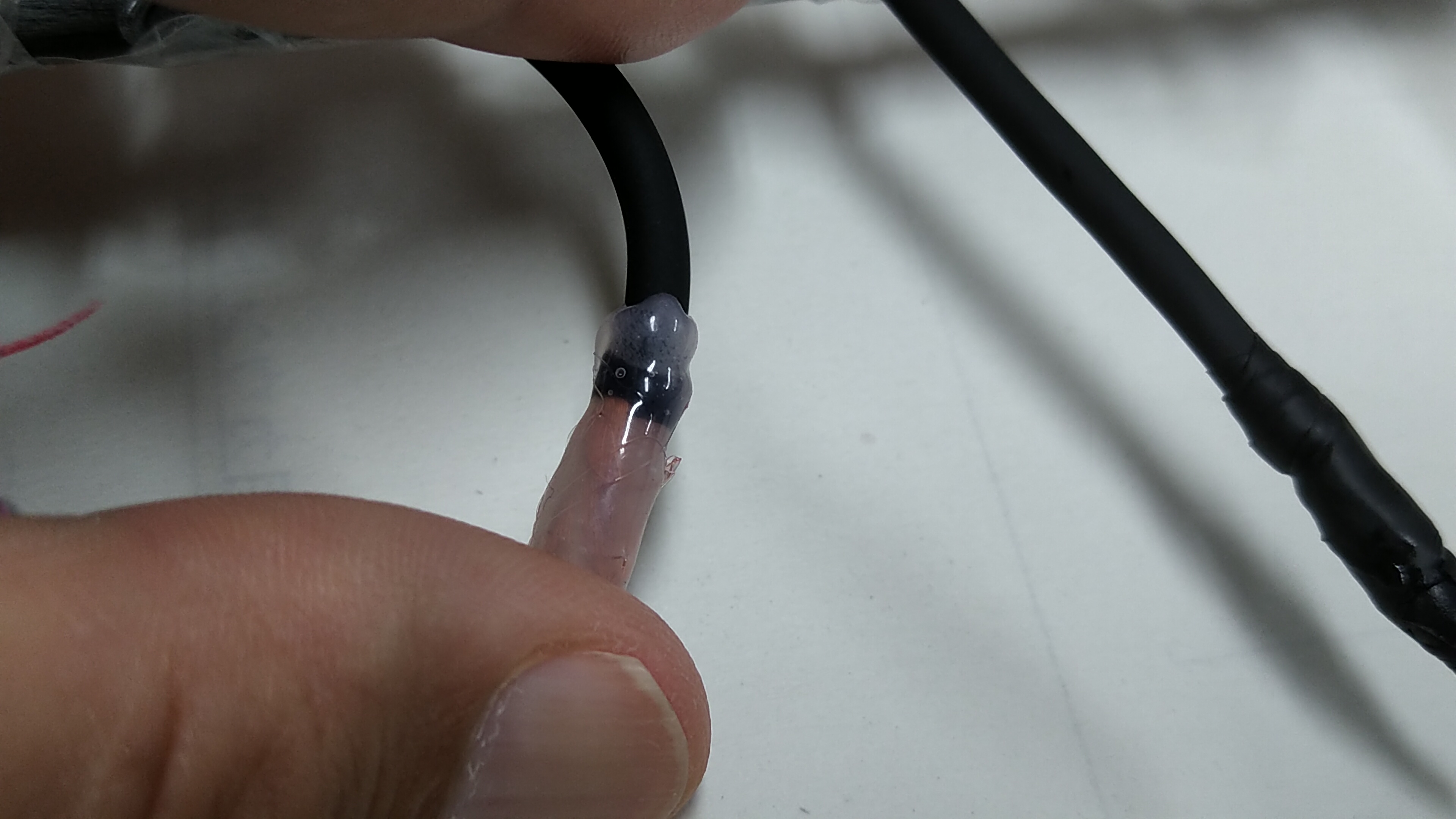
ただし、ホットボンドはケーブルとの接着が悪いので屈曲させると剝れて隙間ができてきます。

ただし、エポキシ樹脂も同様。

自己融着テープは意外と浸水なし、屈曲させても変化なし。

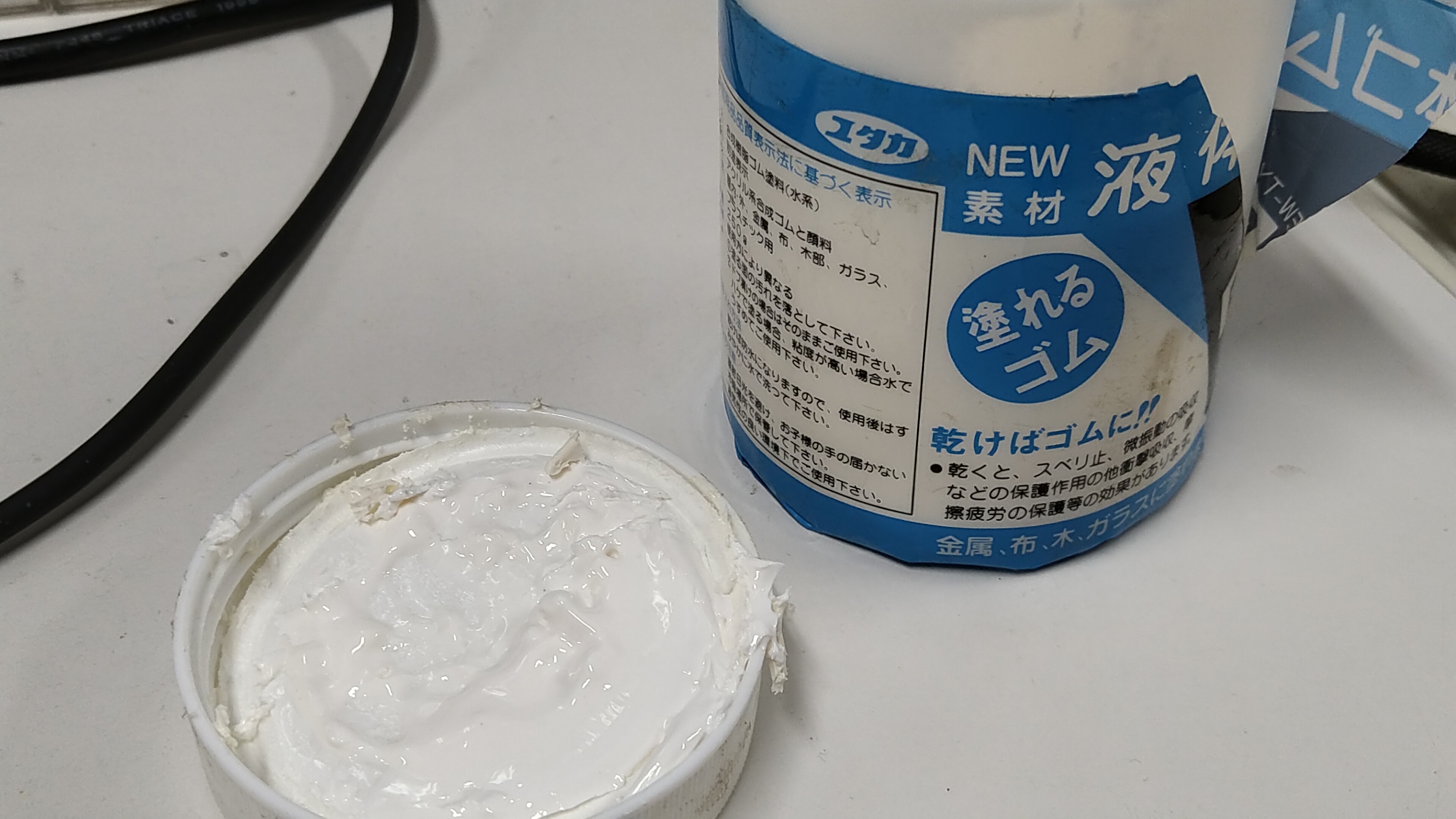
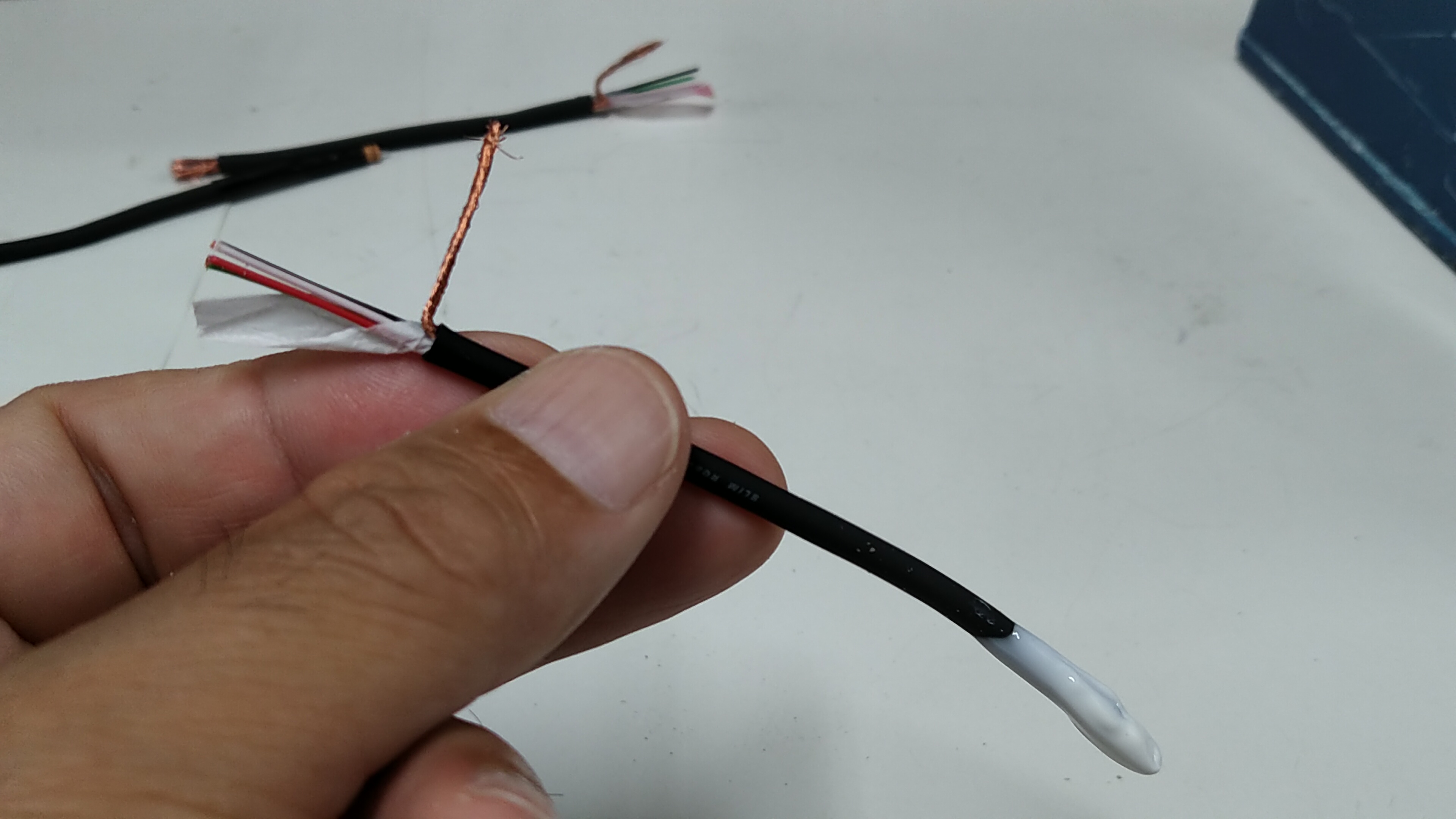
もう一つ、塗れるゴムというのも持ってるものの中から見つけたのでテスト。
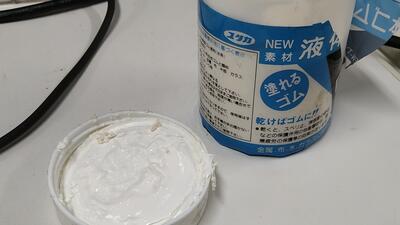
しっかり乾かしてしまえば耐水性はあります。
ただし、中途半端な感想だと、水でふやけて浸水。もともと水性なので水は通すということでしょうか。
原因は、ケーブルに浸水してました。
これが、センサを取り付けた付近だけでなく、1mのセンサ間の50㎝位のところで切ってもしっかり浸水してる。

まさかと思って、ケーブル自体の浸水を疑って、しばらくぬるま湯につけてました。
さすがにケーブル自体が水を通すことはなさそう。
カタログ的には耐油性がある、と書いてあるし。

やっぱり先端の処理に問題あるだろうということで、いくつか試料を作成。
エポキシ樹脂封止、ホットボンド、自己融着テープ、熱収縮チューブ。

インクで色を付けた水に入れました。
何も処理してないものも比較に入れると、数分で水が上がってきました。
未処理、熱収縮チューブはすぐに浸水。
ほか、エポキシ樹脂封止、ホットボンド、自己融着テープは一晩たっても浸水なし。

ただし、ホットボンドはケーブルとの接着が悪いので屈曲させると剝れて隙間ができてきます。
ただし、エポキシ樹脂も同様。

自己融着テープは意外と浸水なし、屈曲させても変化なし。

もう一つ、塗れるゴムというのも持ってるものの中から見つけたのでテスト。
しっかり乾かしてしまえば耐水性はあります。
ただし、中途半端な感想だと、水でふやけて浸水。もともと水性なので水は通すということでしょうか。
雨漏り...
雨漏りするから来い!と実家から呼び出し。
上ってみると瓦に苔。

上の方にもあちこちと。

見た目ではっきりズレた瓦や割れた瓦はないんですが、苔が生えているところがあって雨水の回り込みの可能性もある。
とりあえずできることとして、ブラシやスクレイパーで苔を落として掃除。
上ってみると瓦に苔。

上の方にもあちこちと。

見た目ではっきりズレた瓦や割れた瓦はないんですが、苔が生えているところがあって雨水の回り込みの可能性もある。
とりあえずできることとして、ブラシやスクレイパーで苔を落として掃除。

