移動ロボプラットフォーム
お手軽な自律型移動ロボットプラットフォーム,その1
これ買いました↓この機種を選んだ理由はココ↓ モータがむき出しなのと,4本の支柱が立ってます.あと,安いことも.
ただし,支柱の高さが前後で違います↓
なので,こんなふうに曲げ機で曲げて↓
穴を開けてこんな感じに固定↓
駆動回路とPC等置く場所を作るため2段重ねに↓
Androidタブレット置いてみました↓

【当店ポイント2倍】【Joshinは平成20/22年度製品安全対策優良企業 連続受賞・プライバシーマーク取得企業】ワイルドボア タムテックギアシリーズ No.4【56704】 【税込】 タミヤ [タミヤ タムTワイルドボア]【返品種別B】【smtb-k】【w2】/※ポイント2倍は 01/04am9:59迄お手軽な自律型移動ロボットプラットフォーム,その2
ジャパンロボテックさんのエンコーダ付モータが届きましたので,続きの工作. まず,カラーを外します↓駆動部分のカバーを外すとモータが露出します↓
邪魔な棒をニッパーでプチン↓
モータを外すとこれだけ大きさが違うんですが・・・
当たるところを削れば誤差範囲です↓
モータの軸径も2.5mmで少し太かったですが,交換用ピニオンの穴を少し 広げて問題なし↓
以上で,エンコーダ付モータに換装できました.
次回はいつになるか分かりませんが,シリアル通信の制御系が出来たらまた 報告します. 本格的なものはZMPさんのページへ↓ http://www.zmp.co.jp/robocar/index.html
お手軽な自律型移動ロボットプラットフォーム,その3
Arduinoを使って2相エンコーダによる回転の方向とカウント.スケッチはこれだけ. A相で割り込みをかけてB相で回転方向を検出して,カウンタをアップ・ダウン しています.
その動画
お手軽な自律型移動ロボットプラットフォーム,その4
Arduinoっぽく,ブレッドボードに回路を組んでみました. といっても,R/Cカーのサーボとアンプを使うので,エンコーダ以外のところは, 配線は電源を適当に分配するだけ.USB接続でよければタブレットPCを載せて接続してハード完成!
Arduino-BTを使うなら,5V電源回路をブレッドボードに載せて配線 すれば多分OK. シリアル通信でモータとステアリングを制御する動画
お手軽な自律型移動ロボットプラットフォーム,その5
制御用のコマンドをいろいろ追加しました. こんな感じ↓ // r: ステアリング少し右 // R: ステアリング右いっぱい // l: ステアリング少し左 // L: ステアリング左いっぱい // f: 中速前進 // F: 高速前進 // b: 中速バック // B: 高速バック // n: ステアリングニュートラル // N: アンプニュートラル // u: ステアリング左に1段階 // d: ステアリング右に1段階 // U: アンプ減速またはバックへ1段階 // D: アンプ加速へ1段階 // e: エンコーダ値読み取り // E: エンコーダリセット // g: 角度読み取り // G: 角度リセット // s+数値: ステアリング値を直接出力 // a+数値: アンプ値を直接出力 // p+数値: エンコーダ指定値まで移動(正,負とも可) // v+数値: 定速度制御(正,負とも可)お手軽な自律型移動ロボットプラットフォーム,その6
Arduino-BTに変えて,ブレッドボード上に3端子レギュレータで5V電源 を配置して接続. USBと同様にBluetoothでコマンド制御できて,いちおう初期の目標は 達成できました.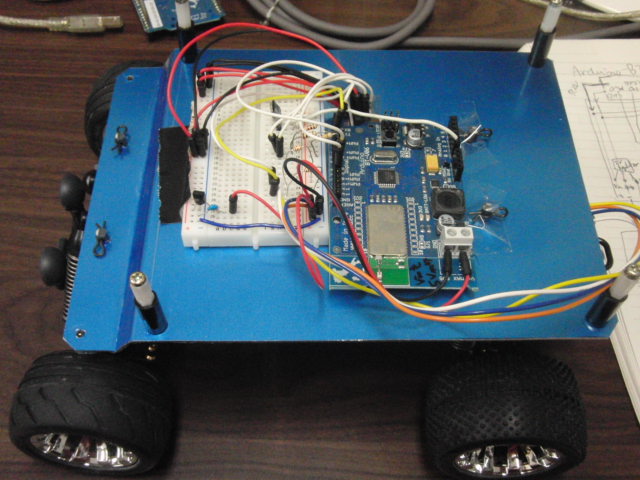
お手軽な自律型移動ロボットプラットフォーム,その7
よくある例ですが,Androidの加速度センサを使って移動ロボットを制御する アプリを作って動かしてみました. 右に傾けるとステアリングが右に切れます.左に傾けるとステアリングが左へ.
左右と同時に前後に傾けると自由に動かせます. その動画→ Android controlled R/C Car Androidの加速度センサによる移動ロボット制御のアプリ(App Inventor)のプロジェクトファイルのダウンロードはこちら
7インチタッチパネルAndroidタブレットDAWA D7
送料区分:小【HSG】MIDX5A(MID700)ブラック Google Androidタブレット




 ESP32 Wifi Bluetooth開発ボード |
 Arduino Nano Every |
 Raspberry Pi pico |
 FPGA XILINX Artix-7 |