教育用GPSロボットカーキット
GPSロボットカーキットの製作過程の記事をまとめました.GPSロボットカーキットの基板、もうちょっと
週末は基板設計。こんな感じで作成中。あとちょっと修正したら完成。 ATMega328Pの左上にセンサ等接続できるようピンヘッダを配置しました。 超音波センサで障害物回避とか、エンコーダで速度制御にも対応できます。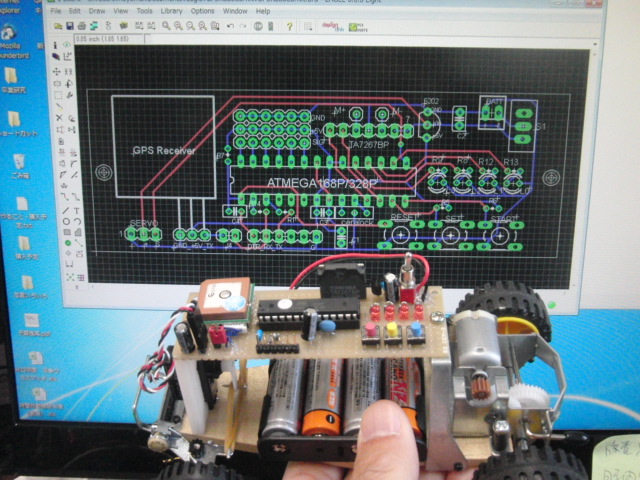
GPSロボットカーキット計画、ソフトほぼ完成
ぼちぼち作ろうと思ってたら別件で急ぎの予定が入ったので集中してソフト作り ました。こんな感じです↓ 赤、リセット 黄色、セットスイッチ 青、実行スイッチ LED、2進4桁表示 プログラムモード 0:サーボテスト サーボが右と左に各1秒ずつ振れてニュートラルに戻る 1:モーターテスト 実行スイッチでモータ正転、セットスイッチでモータ逆転 2:GPSテスト GPSからシリアル出力を受けてLEDが1秒おきに点滅 右端1個点滅、GPS捕捉なし 右2個点滅、GPS捕捉済み 3:ウェイポイントのセット セットスイッチを押すたびにその場所をウェイポイントとして追加 0-15で最大16箇所のウェイポイントを設定可能 設定は、EEPROMに記録するので、電源を切っても残る。 4:ウェイポイントクリア ウェイポイントをクリア、EEPROMもクリア 5:GPS走行 ウェイポイントの0番から呼び出しながら走行 ウェイポイントに指定距離(3m)以内に近づいたら1秒停止。 走行中に次のウェイポイントまでの距離をLEDで2進表示。 6ー:以下未設定 PCつながずにポイントを覚えさせて走らせるので、お手軽です。 あと、パラメータ調整とかすれば出来上がり。 問題点としては、やっぱり電池の減りが早い。 GPSの精度があんまり良くないので、なかなか難しいです。GPSロボットカーキット計画、ハード完成
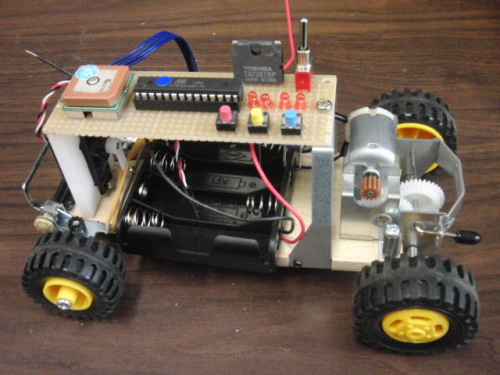
夕方から今までかかってハンダ付け作業。 想定した形にはできたけど、秋月さんから買ったのGPSモジュールGT-723F が想定以上に電流を食ってる。触ると熱くなってるくらい。そのせいで電池の減り が早い。 モータ回すと電圧ドロップしてマイコンが落ちる。 既に電池が減ってるからか?模型モーターが電流食い過ぎるせいか? ほか想定外の寸法ミスも見つかった。 どうしようか悩み中・・・ -追記- キャパシタ追加したり、電源のとり方を替えたりしたら、全機能が動作できるよう になりました。 電池の消耗が早いのは、ゴム引きリンケージで角度が付いている時の電流消費が 予想以上に大きかったこともあります。実際の走行では、舵角は小さく、切ってる 時間も長くないはずなので、多分問題なし。 これまで作ったプログラム元に修正・調整してたら多分ちゃんと動きます。 あとは専用基板も作る予定。
タミヤのバギーカー工作キット、改造計画着々と進行中
昨夜組み立てた、バギーカーを今日はステアリングだけラジコンに改造してみた。サーボの部分を拡大。輪ゴムでお手軽にリンケージできます。
基板を切って使用する部品を載せてみたところ。 これならすぐできそうだから、動くところまで頑張るかな・・・。
BUGGY CARで来年度の構想中
タミヤのBUGGY CARを大量購入しました。これ↓
早速組立て。30分で完成。 子供なら45-60分かな。
ギヤは2段階。早い方だと結構激しいです。 その動画ー>TAMIYA BUGGY CAR 何をしたいかというと、こんな感じで動かしてみたいのです↓
GPSロボットカーキットの基板到着
注文していた基板が到着しました。近いうちに部品を載せて、 前に作ったユニバーサル基板と取り替えます。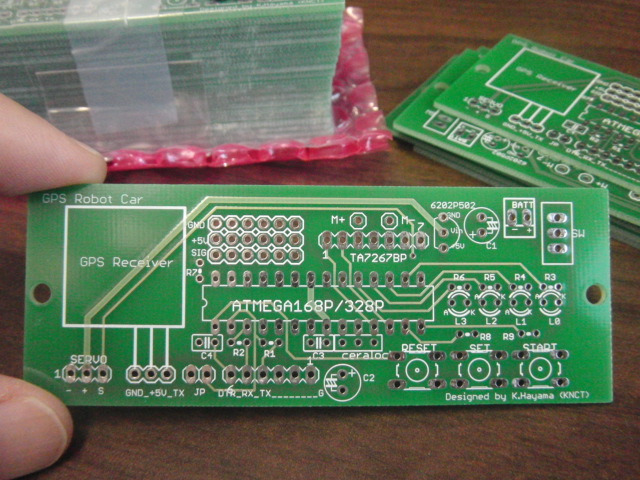
GPSロボットカーキット完成
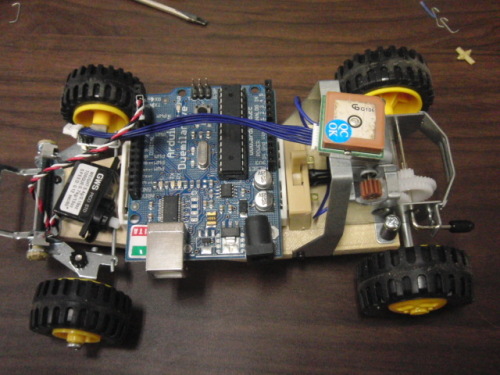
話が飛び飛びですが・・・ 先日できた基板に部品をはんだ付け、試作機に基板を載せ替えました。 マイコンもサーボもGPS受信も問題なくできて、これでキット完成。 いい感じでしょ↓市販の工作キットと、ちょっと改造と、ハンダ付けと接続、組み上げなんですが、 一般的な中学生にはちょっと難しいかも。高校生以上くらいの電子工作ネタで 使えそうです。 --追記-- 実際に走らせてなかったので、走らせてみたら、細かい問題発生。 プログラムの修正をしていたらなぜか設定した座標がおかしくなり、半日悩んだら 、標準の関数を使ってるのにある条件の時にポインタの扱いがおかしくて、座標の 配列のところまで悪さしていたもよう。文法的な間違いはなかったので、えらく手間 取った。 結構厳しい点もあった。使用してるGPSの精度が悪いのである程度の速度で動い てないと、正しい方位を出さない。なめらかな平地なら問題ないけど、ガタガタの 路面だとあまり速度が出ずに方位をとれず、まともに走らない。 ベースの車体が良ければ問題無いので、良しとしましょう。
GPSロボットカーの教材,進展(追記と動画)
あとちょっとの所で止まっていたGPSロボットカーの教材について, (エントリーはこちら↓) http://plaza.rakuten.co.jp/cpu4edu/diary/201203210000/ お尋ねがあったのでちょっと手を加えてみました. 残ってた問題は, ・モータドライバの内部抵抗が大きくてモーターが回りきれてない ・速度がでないために,GPSの方位が正しく得られない の2点でしたが, モーターをミニ4駆のモータ(アトミックチューンモーター)に変えてみました. すると見違えるように力強く走りだし速度も方位取得の問題も解決できそうです. こちら↓の性能比較だと,ノーマルモータのトルク10g-cmに比べて 14g-cmあるそうです. http://www.tea-league.com/web/mot.htm近いうちに屋外試験をしてパラメータ調整してそれなりに走るようになったら, 配布や工作教室などの活用の場を考えたいと思います. --追記-- やっとそれなりに動くようになりましたので動画をアップします. GPSロボットカーキット,試走 ウェイポイントを2箇所設定しており蛇行しながらもウェイポイントに向かって走ります. ウェイポイントに到達すると一旦停止し次のポイントに向かい最後は停止します. 簡単なプログラムですがこのままでも直進の微調整,舵角の比例値,舵角の最大値を 適当に調整すればもう少し蛇行がおさまるはずです. プログラムで更に改善の余地もあります.
GPSロボットカーキット,配布準備
POM板の切り出しと加工,タミヤのバギー工作基本セットの部品加工をして・・・とりあえず3セット準備中. 足りない部品の調達が間に合ったら,来週開催される測位航法学会のH25年度 全国大会で評価用に提供する予定.詳しくは現地で共同研究者のI先生にお尋ね ください. 学会の開催案内→ http://www.gnss-pnt.org/taikai25/

キット配布と基板配布
Make Faire Tokyo 2013 でキット配布と基板配布したので, 組み立てのリンクを貼っておきます. 楽天ブログ内にソースやpdfは置けませんので,マニュアルやソース・ファイルは こちらから↓ http://lab.irie-lab.net/GRSCC/

 ESP32 Wifi Bluetooth開発ボード |
 Arduino Nano Every |
 Raspberry Pi pico |
 FPGA XILINX Artix-7 |