ArduinoNanoEveryを使ったマイクロマウスの構想 その4
中国から郵便が来ました。

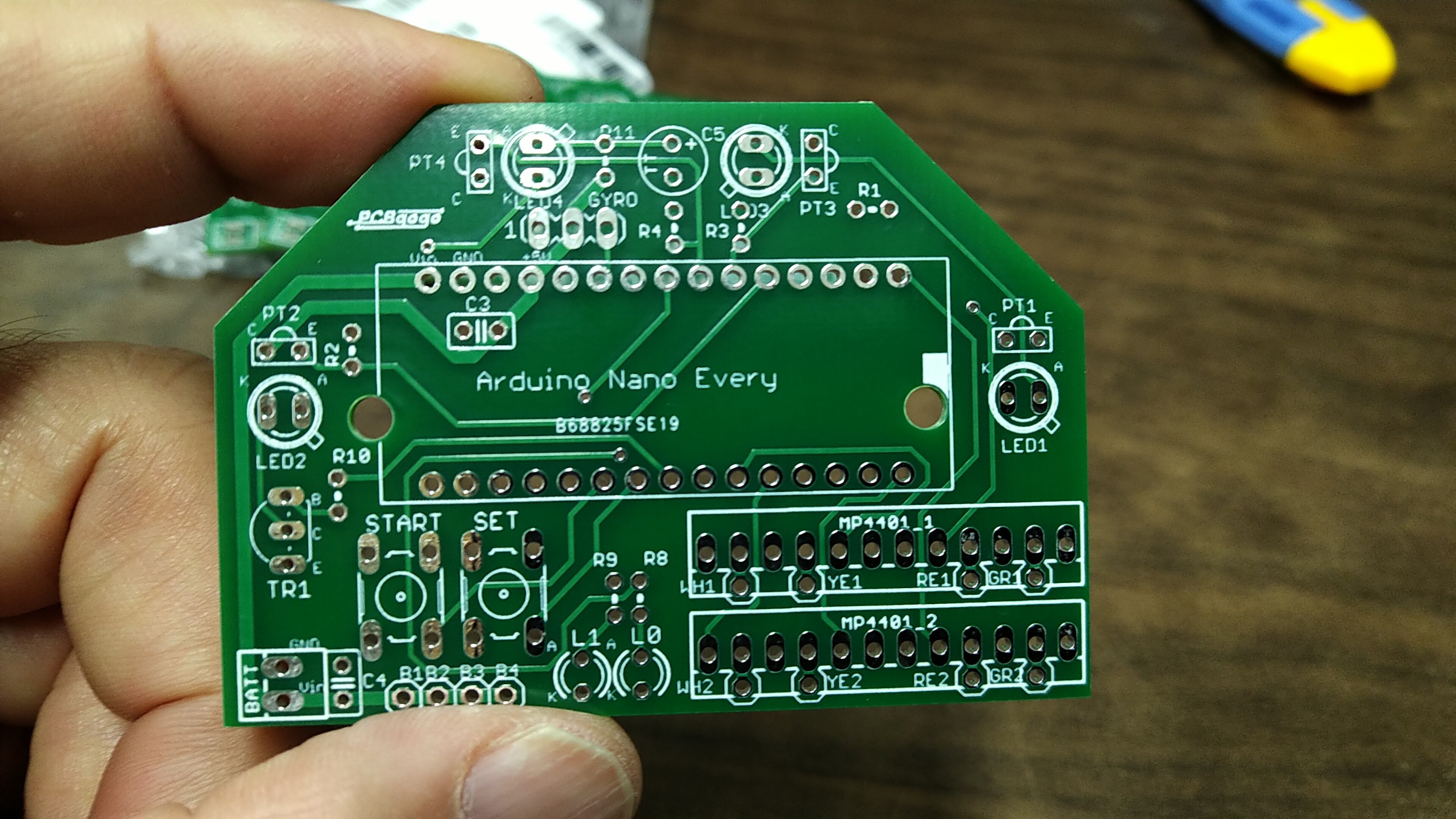
マイクロマウスの基板でした。以前書きこんだ、基板0円、送料のみのやつです。

開封したらPCBGOGOのロゴがこんなに控えめに。
もっと大きくて良かったんですが、場所がなかったせいでしょうか。申し訳ないです。


マイクロマウスの基板でした。以前書きこんだ、基板0円、送料のみのやつです。

開封したらPCBGOGOのロゴがこんなに控えめに。
もっと大きくて良かったんですが、場所がなかったせいでしょうか。申し訳ないです。


水中スラスターの推力を測ってみた。
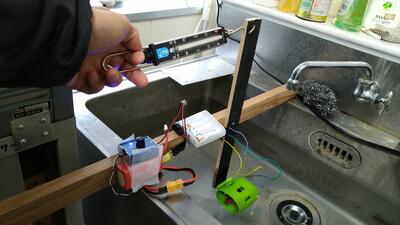
折角なので、簡易的な推力測定を行ってみました。
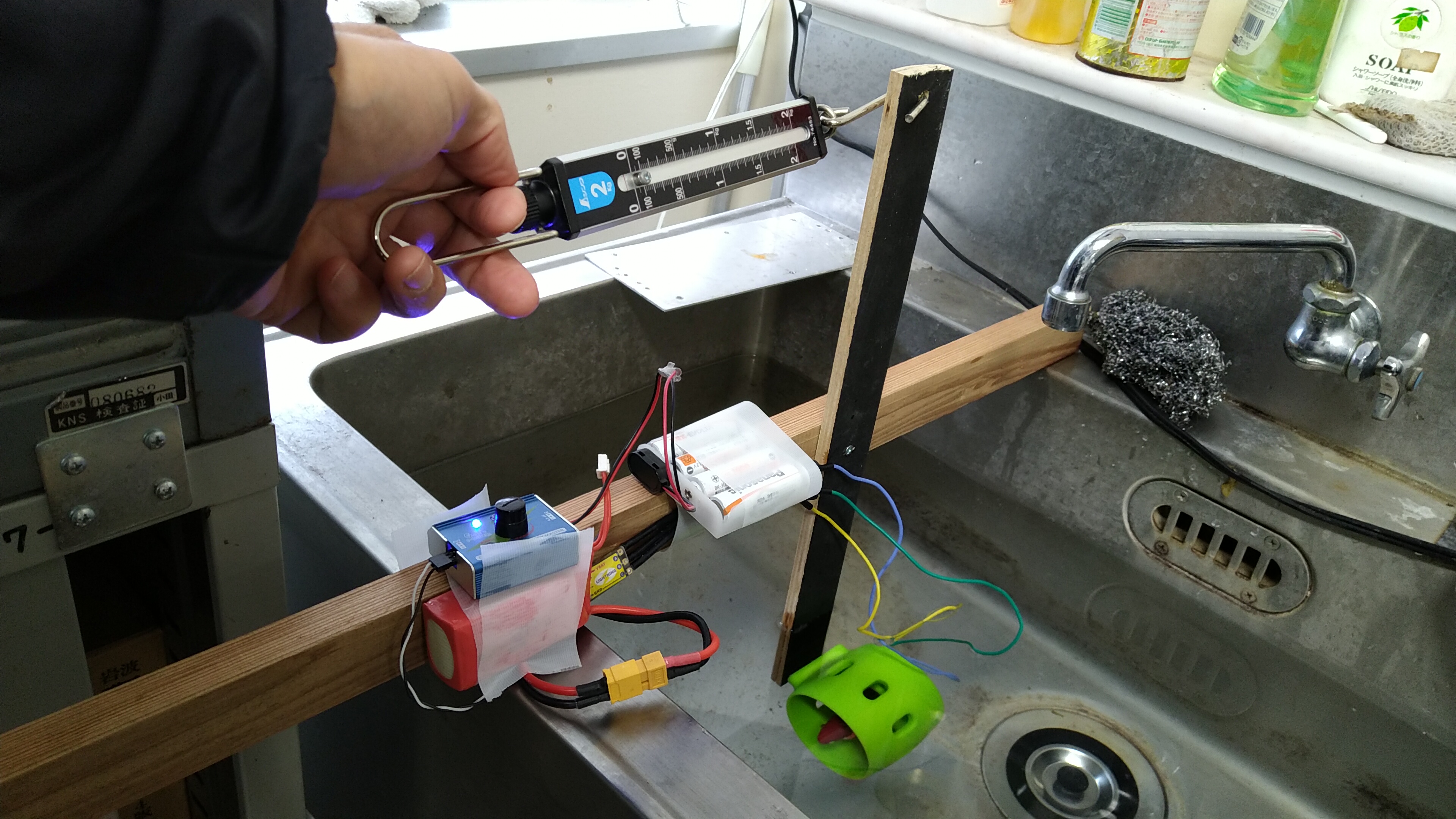
適当な端材をねじ止めして、ばねばかりで引っ張ります。
実験動画はこちら。
3セル11.1V,1.4Ahのリポバッテリーで最高まで上げて約800gの推力が出ました。
アンプは6セル45Aまで行けるので、この数倍は推力が出せるでしょう。
購入はこちら。
ボート水中モーター、Funien 1000KV水中ブラシレスモーター時計回り4ブレードプロペラ付き12-24V防水電気モータードライブエンジン(RCベイトボートネストシップ用)
適当な端材をねじ止めして、ばねばかりで引っ張ります。
実験動画はこちら。
3セル11.1V,1.4Ahのリポバッテリーで最高まで上げて約800gの推力が出ました。
アンプは6セル45Aまで行けるので、この数倍は推力が出せるでしょう。
購入はこちら。
ボート水中モーター、Funien 1000KV水中ブラシレスモーター時計回り4ブレードプロペラ付き12-24V防水電気モータードライブエンジン(RCベイトボートネストシップ用)
水中スラスター購入しました
先日ネットで見つけた水中スラスターを購入しました。
ダンボール箱で到着。
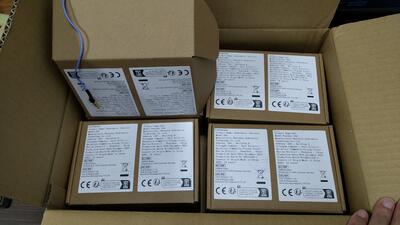
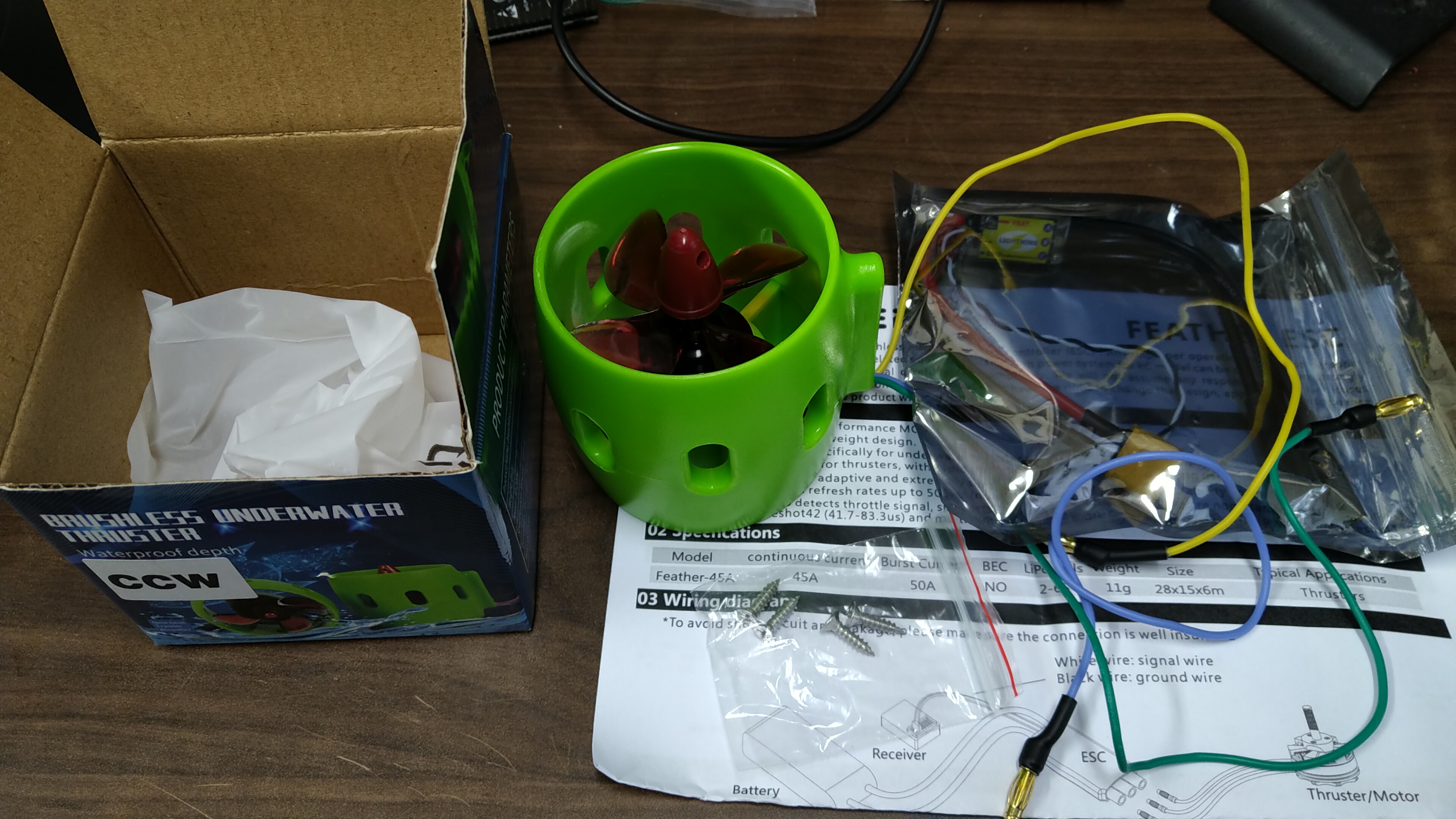
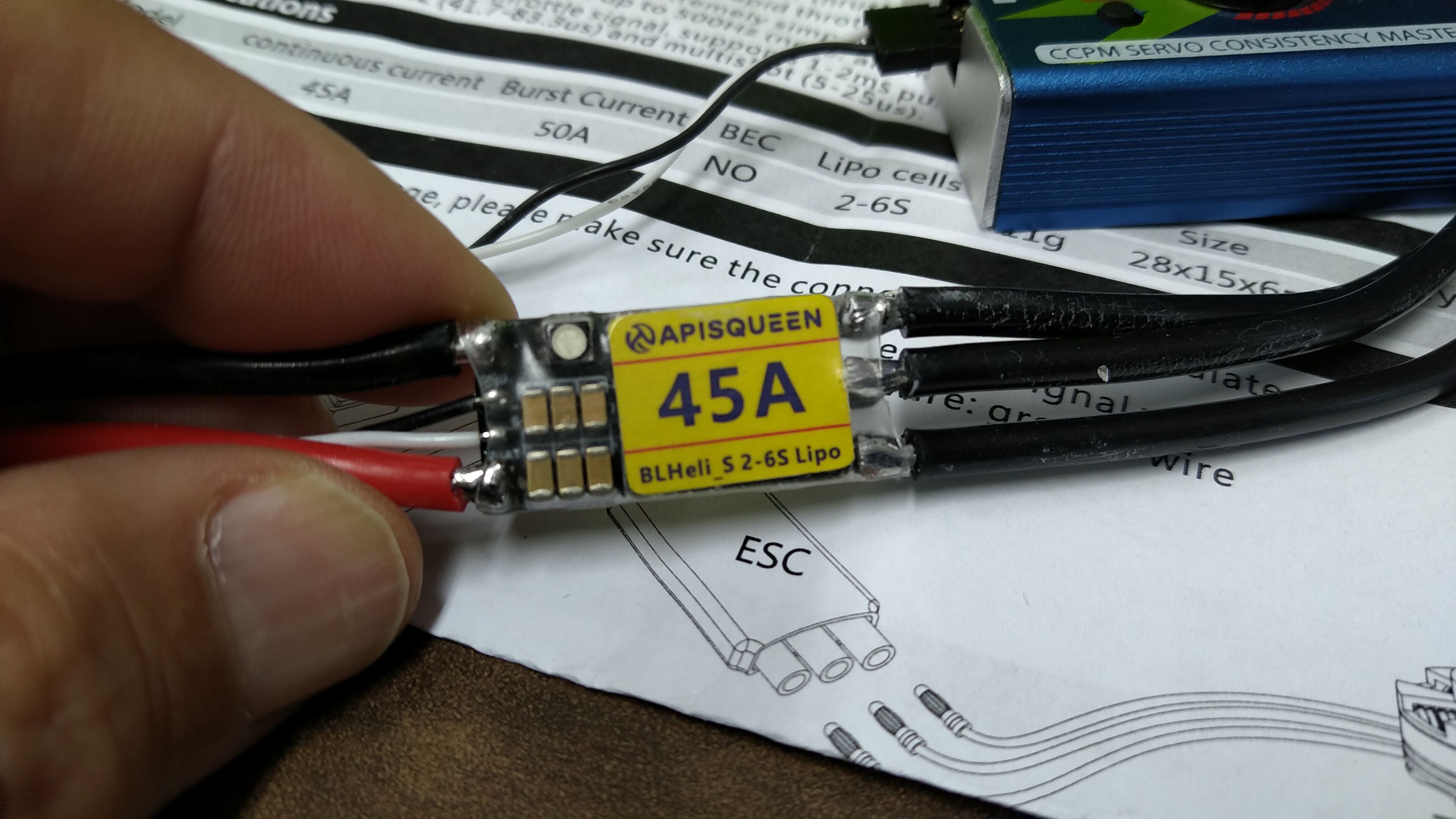
内容物は、スラスター、ネジ、ESC、説明書。

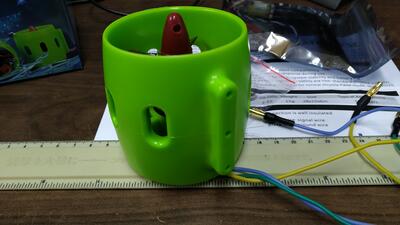
サイズ感とネジ取り付け部分はこんな感じ。外形70㎜です。
モーター裏面の接続部分は防水。

ESCは45Aで双方向に回転できます。

動画はこちら。
BECがついてないので、サーボコントローラを左いっぱいに絞った状態で接続。それからボリュームを回していくと、サーボがセンターくらいで初期化のビープが鳴ります。その後は、ボリュームを左右に回すと、スラスターが正逆転。
最後にサーボコントローラをスイープさせると、スラスターの回転も交互に回転してます。
もちろん、電源投入時にサーボコントローラをセンターに合わせておくと、最初からセンターで初期化されます。
購入はこちら。
ボート水中モーター、Funien 1000KV水中ブラシレスモーター時計回り4ブレードプロペラ付き12-24V防水電気モータードライブエンジン(RCベイトボートネストシップ用)
ダンボール箱で到着。
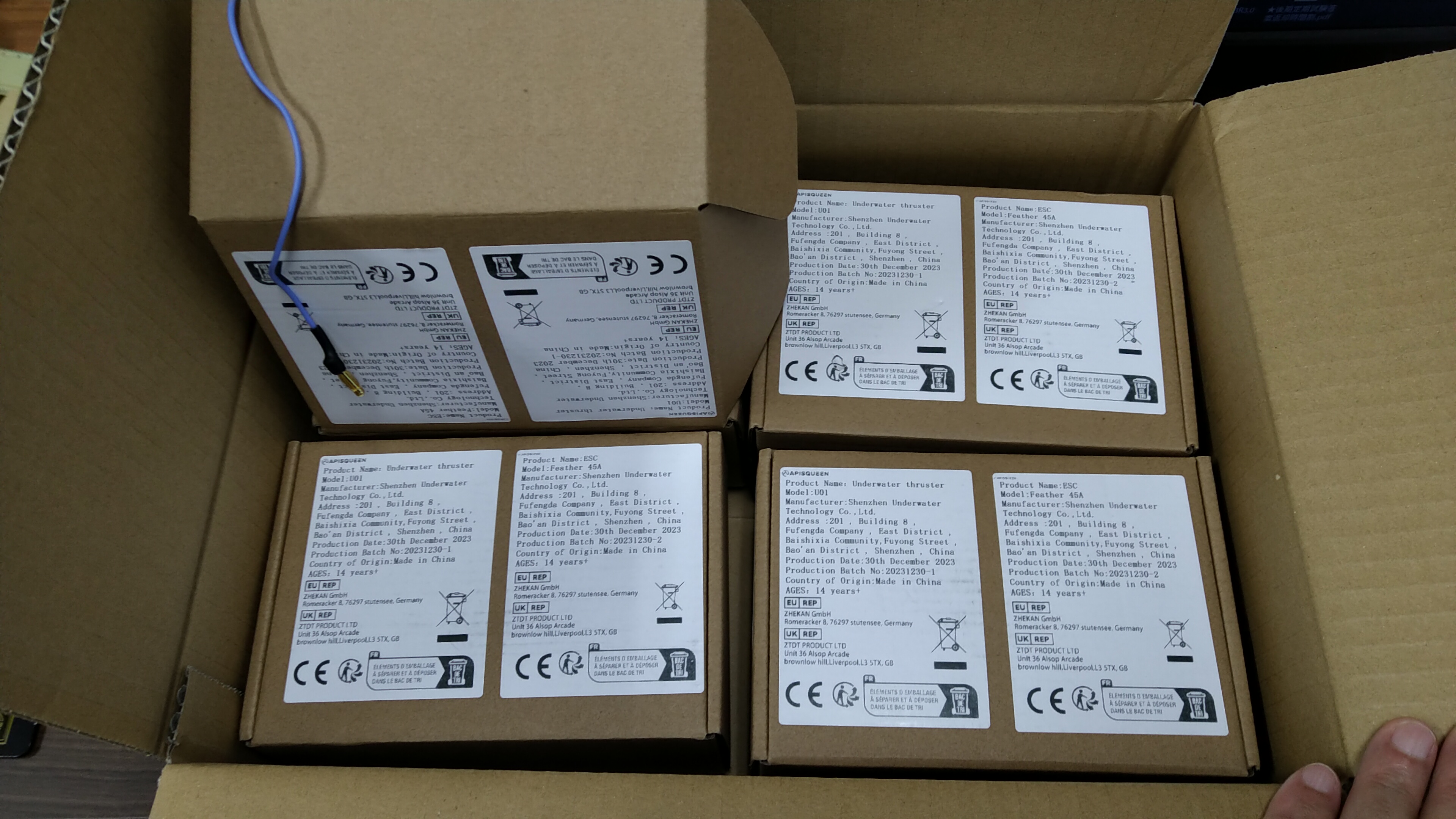
内容物は、スラスター、ネジ、ESC、説明書。
サイズ感とネジ取り付け部分はこんな感じ。外形70㎜です。
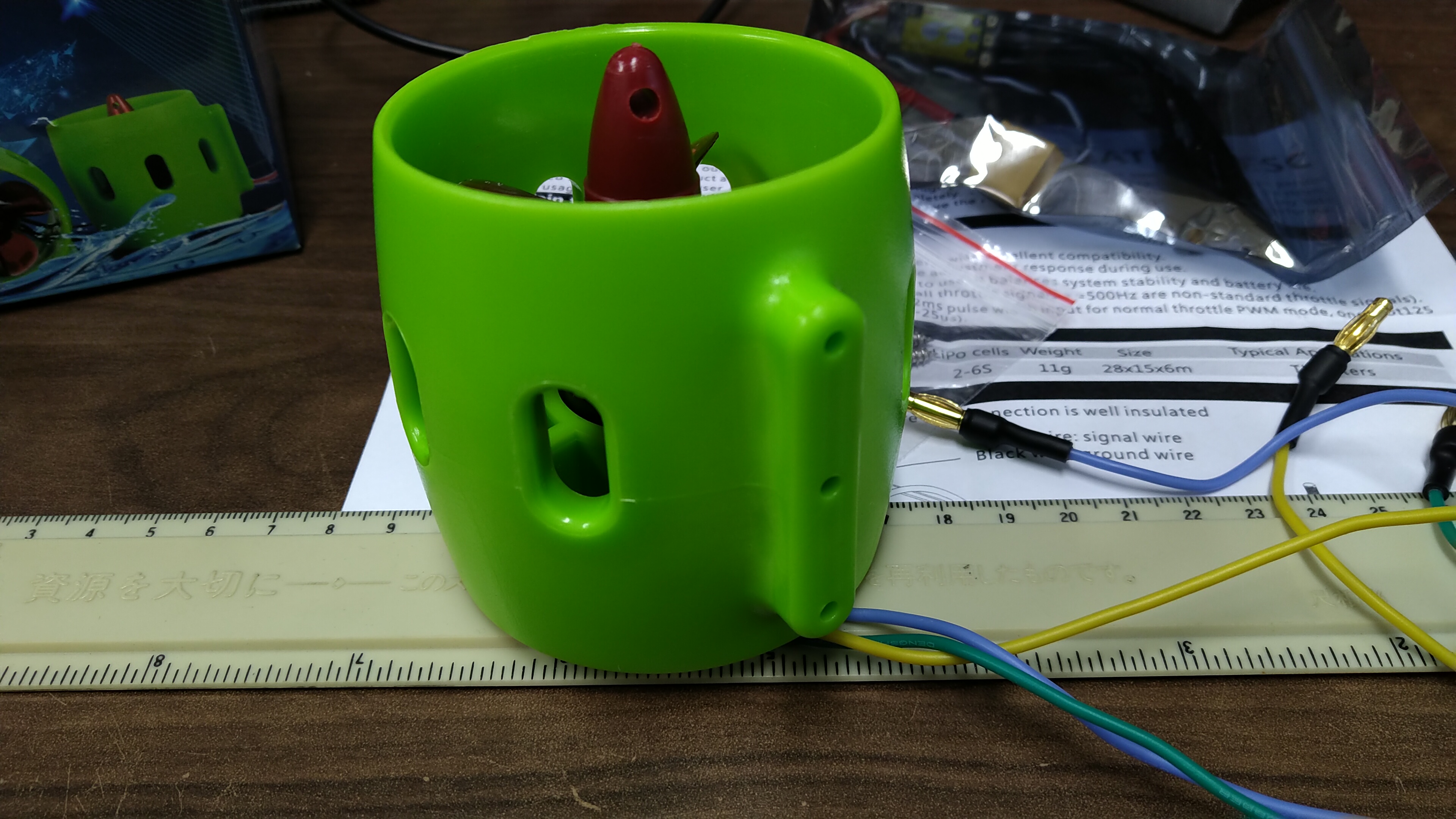
モーター裏面の接続部分は防水。

ESCは45Aで双方向に回転できます。
動画はこちら。
BECがついてないので、サーボコントローラを左いっぱいに絞った状態で接続。それからボリュームを回していくと、サーボがセンターくらいで初期化のビープが鳴ります。その後は、ボリュームを左右に回すと、スラスターが正逆転。
最後にサーボコントローラをスイープさせると、スラスターの回転も交互に回転してます。
もちろん、電源投入時にサーボコントローラをセンターに合わせておくと、最初からセンターで初期化されます。
購入はこちら。
ボート水中モーター、Funien 1000KV水中ブラシレスモーター時計回り4ブレードプロペラ付き12-24V防水電気モータードライブエンジン(RCベイトボートネストシップ用)

Arduinoで自作のフライトコントローラでトライコプター
自作のフライトコントローラによるQuadcopterの安定した動画を残ってなかったですが、探してみたらtricopterは自作のコントローラでそこそこ安定したものが動画で残ってたようです。
Arduinoで自作のフライトコントローラでクワッドコプター
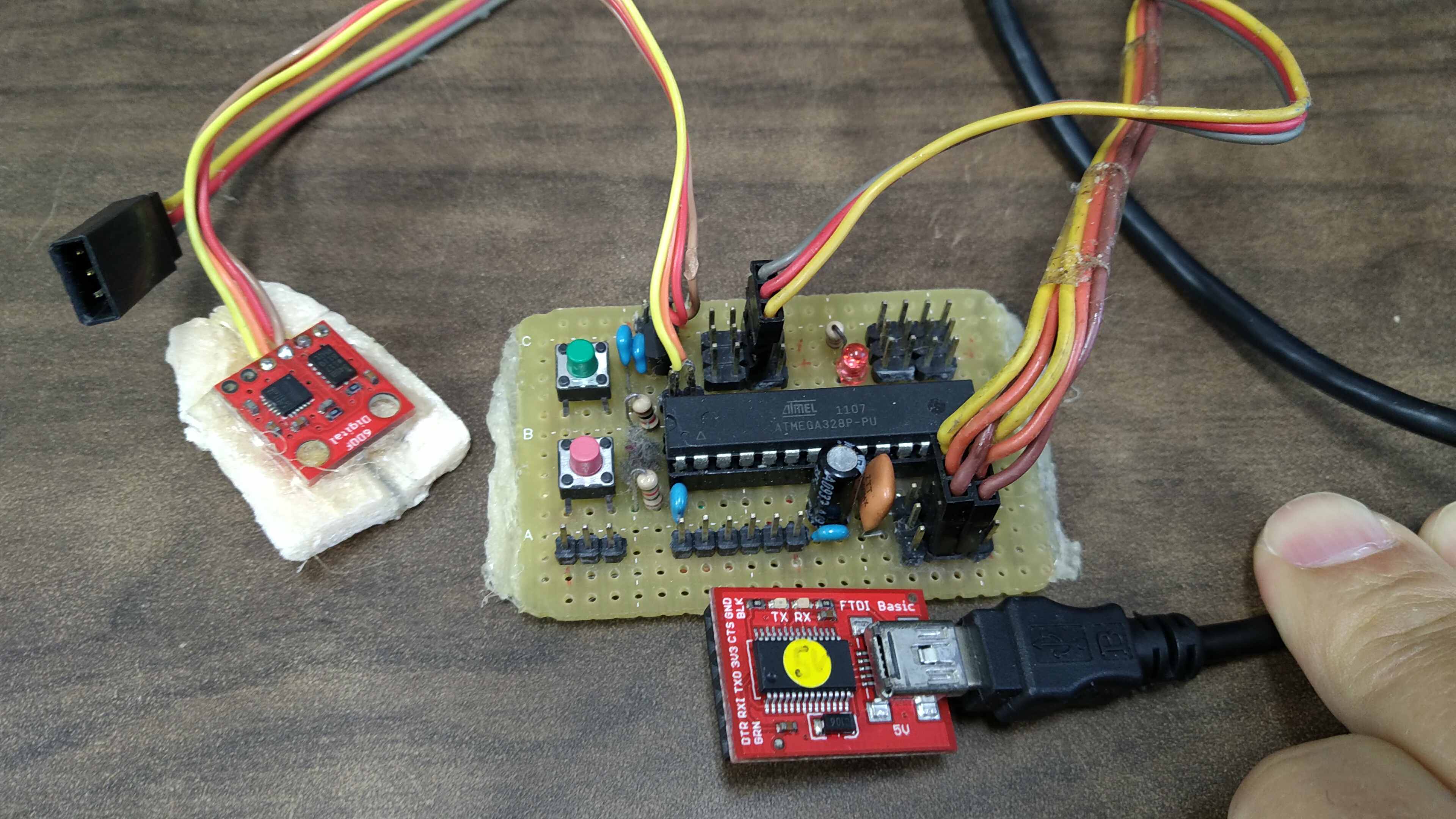
10年くらい前に作った、自作のフライトコントローラが探したら出てきました。ArduinoのIDEでAtmega328PにUSBシリアル変換を使ってプログラムを書き込み。
受信機の信号を4チャンネル入れて、クワッド区コプター用にESCの出力を4チャンネル持ってて6DOFのIMUをI2Cで読みとって、あとはソフト頑張ってギリギリ浮くくらいまでには作りました。
数学的に弱いので移動平均と積算で簡易的なフィルタを作って姿勢を読み取って制御してたのでなかなか厳しかったです。
その時の動画はこちら。
これよりもう少し安定するところまでできたのですが、APMを購入したので乗せ換えてしまって動画は残ってませんでした。
今は、昨日試したMadgwickフィルタとか簡単に使えるライブライブラリが用意されてるのでもっと安定して飛ばせるかも。
受信機の信号を4チャンネル入れて、クワッド区コプター用にESCの出力を4チャンネル持ってて6DOFのIMUをI2Cで読みとって、あとはソフト頑張ってギリギリ浮くくらいまでには作りました。
数学的に弱いので移動平均と積算で簡易的なフィルタを作って姿勢を読み取って制御してたのでなかなか厳しかったです。
その時の動画はこちら。
これよりもう少し安定するところまでできたのですが、APMを購入したので乗せ換えてしまって動画は残ってませんでした。
今は、昨日試したMadgwickフィルタとか簡単に使えるライブライブラリが用意されてるのでもっと安定して飛ばせるかも。

