小型スラスタの製作
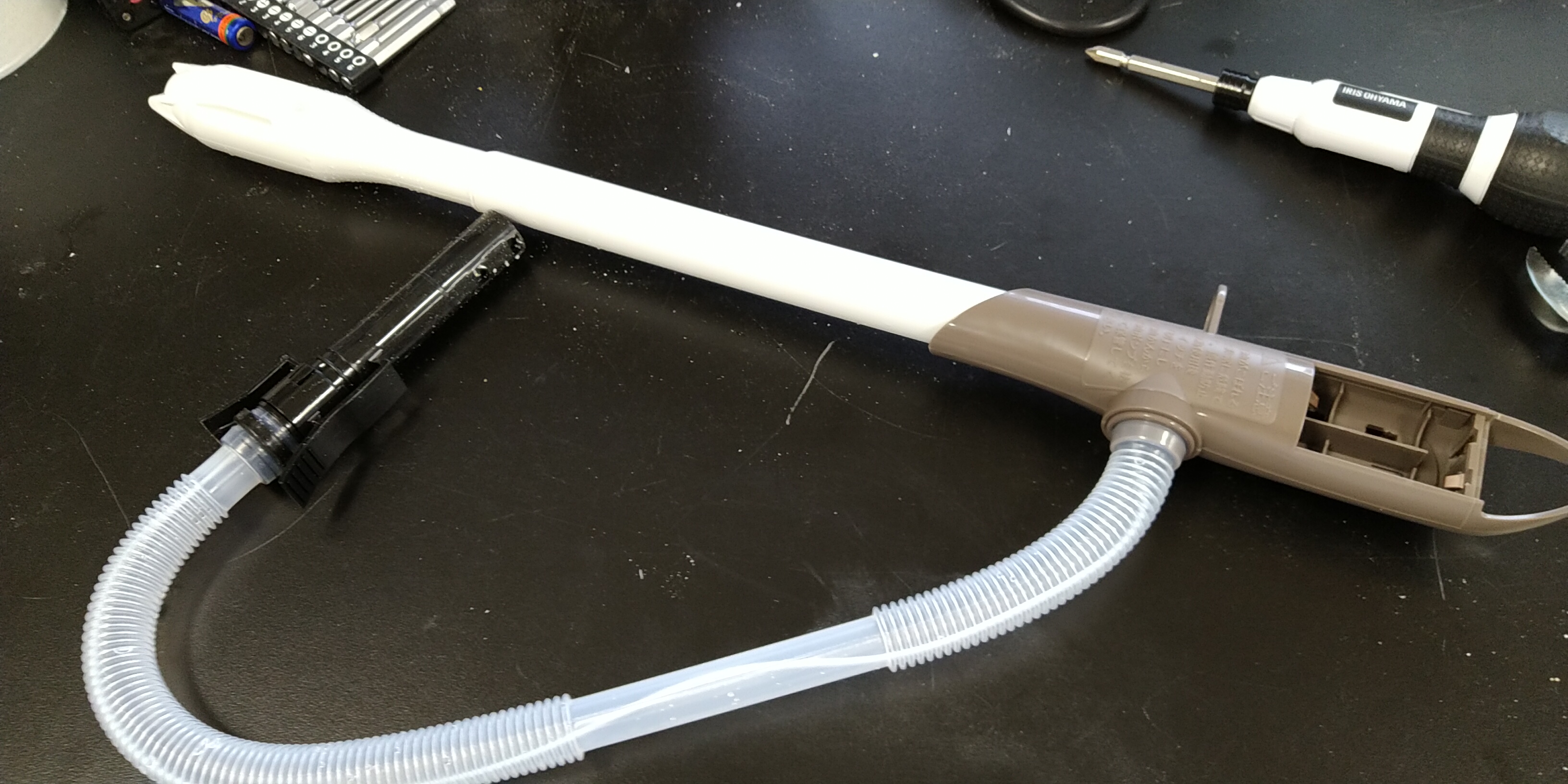
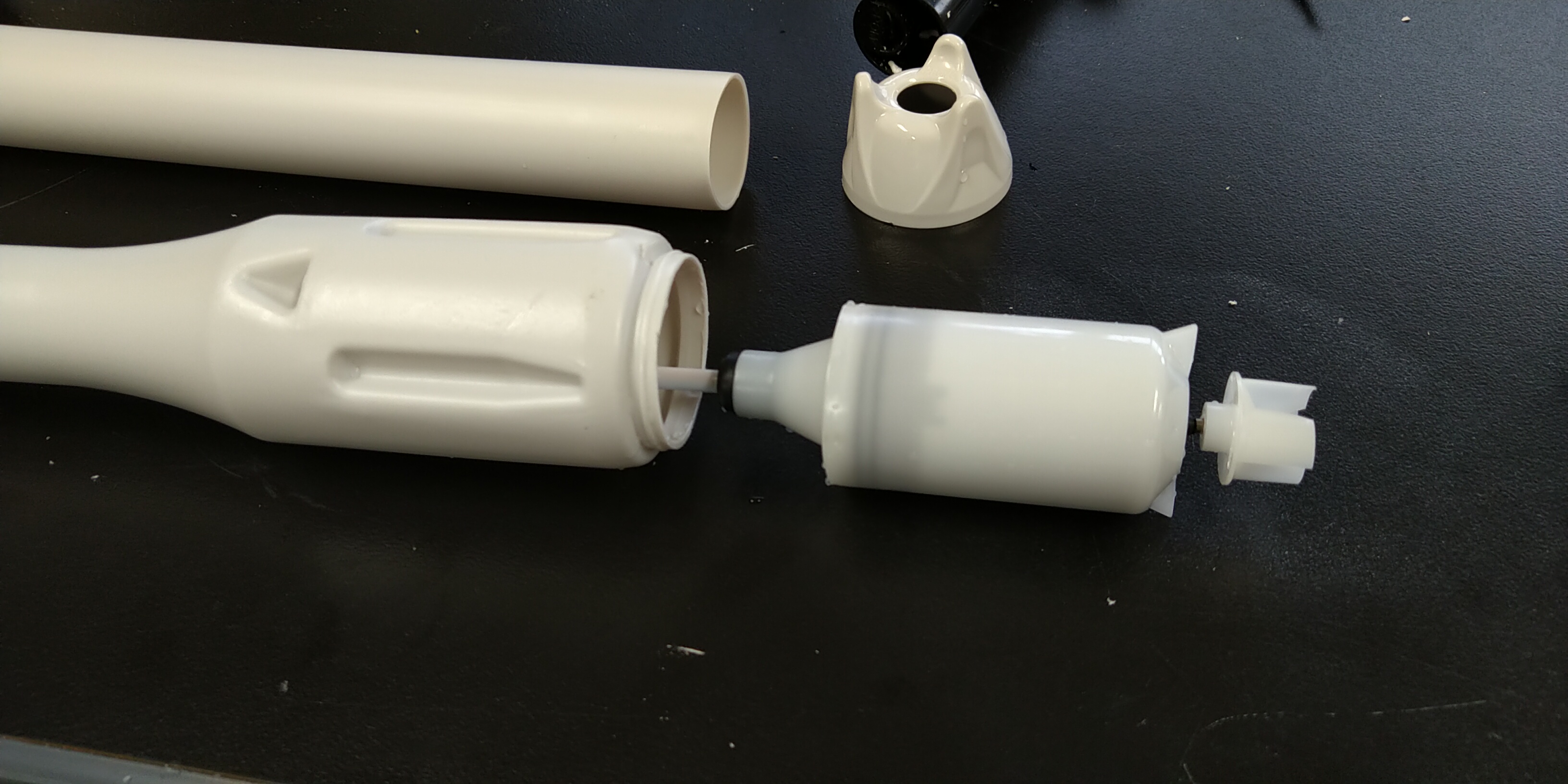
灯油ポンプを分解すると小型の防水モーターが入ってるとの情報があり、購入してみました。
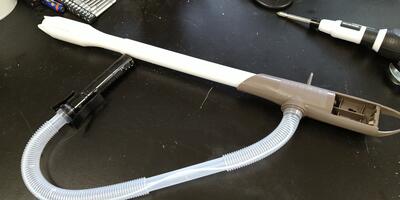
分解したら先の方に入ってました。

というわけで、プロペラをつけてスラスタ製作
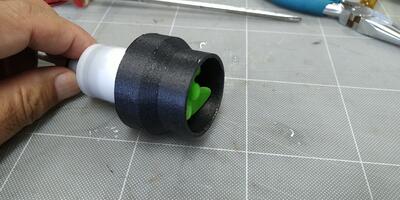
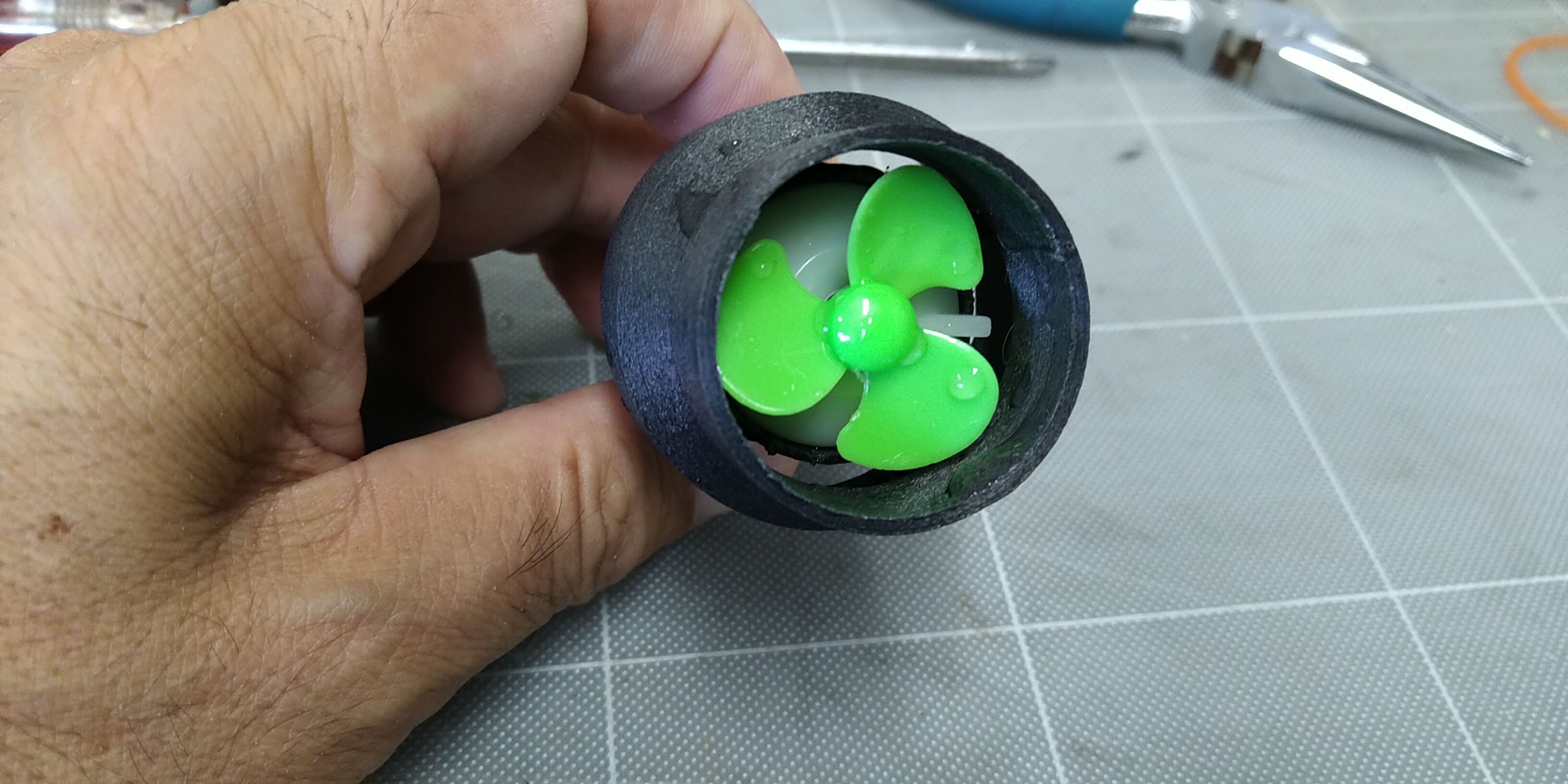
正面から。

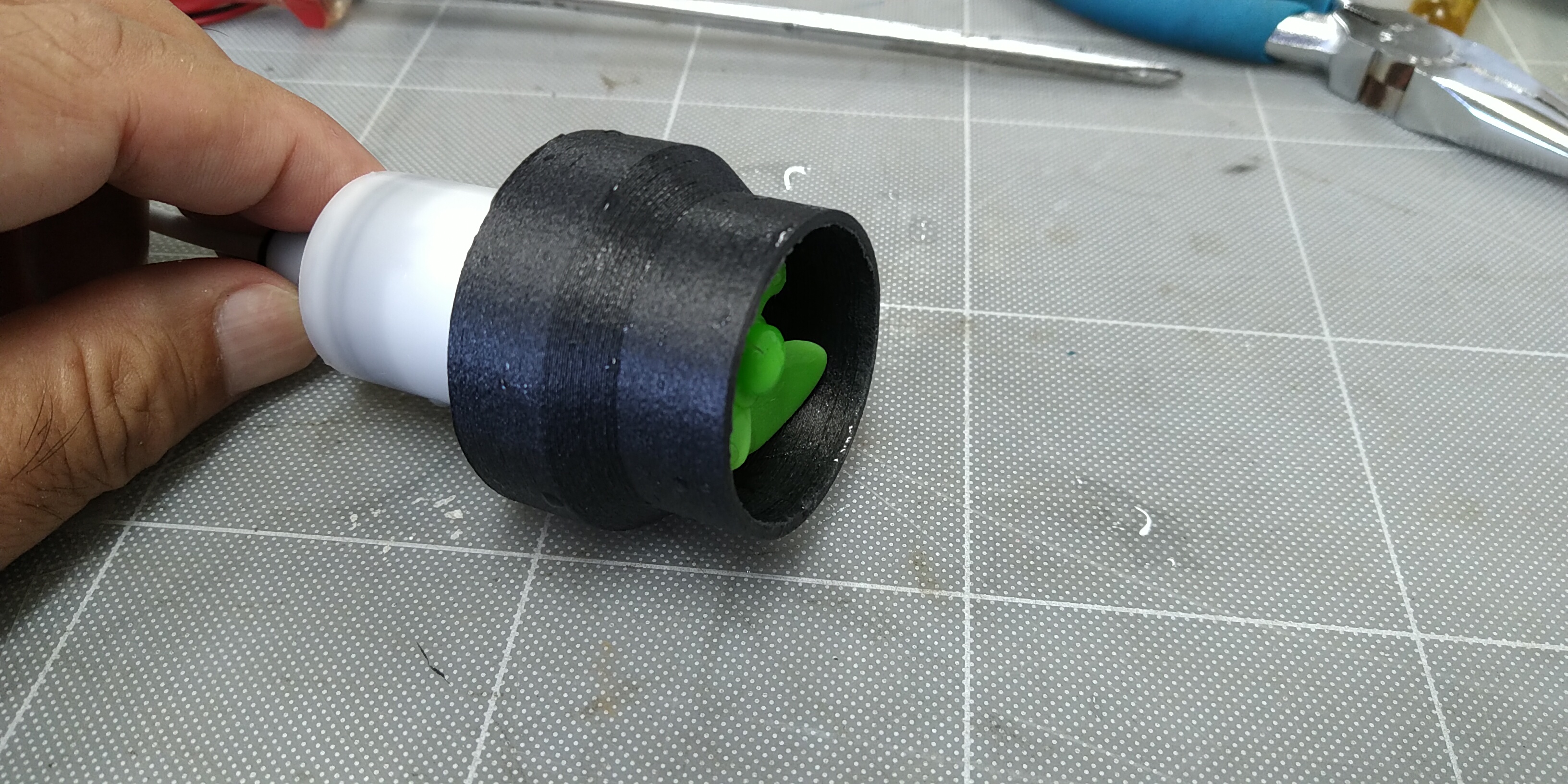
後ろから。
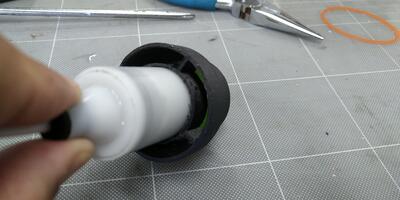
防水モーターの直径が26㎜。
購入したプロペラサイズは30㎜。
多分これ以上サイズが大きいと回りません。
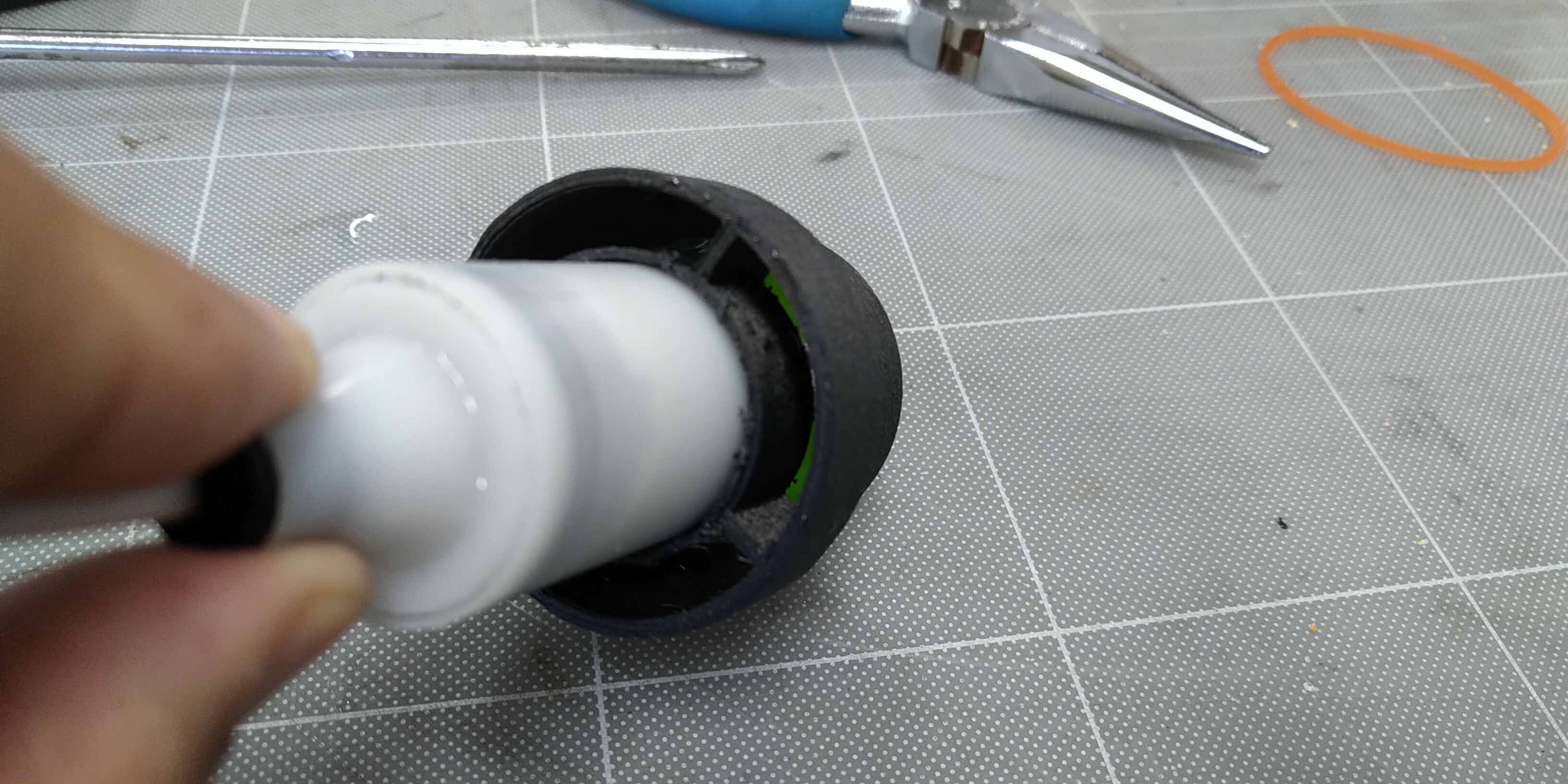
なので、吸水側を40㎜、排水側を32㎜としてその間を円錐形でつなぐノズルを3Dプリンタで製作しました。給水側がどのくらい吸ってくれるかは?でしたが、まあまあの推力が出てると思います。
ただしやっぱり過負荷ではあるので、モーターがどのくらい持つか。
防水モータを分解して、高電圧用のモーターに替えると良いらしいです。
分解したら先の方に入ってました。
というわけで、プロペラをつけてスラスタ製作
正面から。
後ろから。
防水モーターの直径が26㎜。
購入したプロペラサイズは30㎜。
多分これ以上サイズが大きいと回りません。
なので、吸水側を40㎜、排水側を32㎜としてその間を円錐形でつなぐノズルを3Dプリンタで製作しました。給水側がどのくらい吸ってくれるかは?でしたが、まあまあの推力が出てると思います。
ただしやっぱり過負荷ではあるので、モーターがどのくらい持つか。
防水モータを分解して、高電圧用のモーターに替えると良いらしいです。


自作の偏向スラスター式のボートにPixhawkを搭載、その2
設定終わって、プールで動かしてみました。
現地で不具合を色々修正して、無事自律航行できました。


設定メモ
とりあえず、Pixhawkには最新のRoverのファームウェアを搭載。
R/Cのチャンネル割り当てで、Futabaの受信機を使ったので、ステアリングは1ch,スロットルは3ch入出力。
サーボの電源がPixhawkのサーボ出力の所に出ていないので、電源から分離してBECで5Vを供給。
ステアリングサーボでスラスターを偏向。後方のスラスターをギヤをかまして回してるため、左右反転が必要。
サーボのRC1でチャンネルをreverseかけた。
manual操作とAuto、Loitorを3段階のスイッチ入力で5chに割り当て。
アームは実験時はリモートで強制アーム。後に、送信機の8番をON-OFFスイッチに割り当ててアームの切り替え。
ボートの旋回性が良くてスラスターの推力も大きすぎるので制限。速度は1m/s、スラスター出力を最高50%に絞った。
動かしながらフライトデータの画面で、GPS、目標方向の変化とスラスターの向きを確認。
ウェイポイント(WP)を設定してAutoで動かす。
2ポイントの3回往復成功。終わったらLoiterでその場にとどまる。
Loiterは、モーターの逆転もしてとどまってくれるようだ。
次にWPを4ポイント設定して巡回させた。これも成功してプール実験終了。
その後、電源モジュールの設定をいろいろ探すが、電圧のモニターしかできず。電流は読めない。
電圧でアラーム出せるのでまあOK.
ー上手くいかなかった状況ー
すんなりできたわけでなくて、最初はAutoに切り替えると暴走してた。
いろいろ試したが、サーボのリバースをどのようにかけるかの問題と出力の制限で解消できた感じ。
サーボが逆に動くのは、ラジコン送信機設定、SBUS読み取りの設定、サーボ出力の設定の3か所でリバース設定ができるが、Autoではラジコンは関係なくなるので、ボートとPixhawkとの関係が上手くいってないとだめなので、サーボ出力の部分を船体に合わせないといけないようだ。
あと、出力が大きすぎると急激に旋回して方向を見失ってしまう。フルパワーフル舵でぐるぐる回ってしまうことがあった。こうなるとGPSの方向が狂うし制御の遅れがでるのだろう。
現地で不具合を色々修正して、無事自律航行できました。


設定メモ
とりあえず、Pixhawkには最新のRoverのファームウェアを搭載。
R/Cのチャンネル割り当てで、Futabaの受信機を使ったので、ステアリングは1ch,スロットルは3ch入出力。
サーボの電源がPixhawkのサーボ出力の所に出ていないので、電源から分離してBECで5Vを供給。
ステアリングサーボでスラスターを偏向。後方のスラスターをギヤをかまして回してるため、左右反転が必要。
サーボのRC1でチャンネルをreverseかけた。
manual操作とAuto、Loitorを3段階のスイッチ入力で5chに割り当て。
アームは実験時はリモートで強制アーム。後に、送信機の8番をON-OFFスイッチに割り当ててアームの切り替え。
ボートの旋回性が良くてスラスターの推力も大きすぎるので制限。速度は1m/s、スラスター出力を最高50%に絞った。
動かしながらフライトデータの画面で、GPS、目標方向の変化とスラスターの向きを確認。
ウェイポイント(WP)を設定してAutoで動かす。
2ポイントの3回往復成功。終わったらLoiterでその場にとどまる。
Loiterは、モーターの逆転もしてとどまってくれるようだ。
次にWPを4ポイント設定して巡回させた。これも成功してプール実験終了。
その後、電源モジュールの設定をいろいろ探すが、電圧のモニターしかできず。電流は読めない。
電圧でアラーム出せるのでまあOK.
ー上手くいかなかった状況ー
すんなりできたわけでなくて、最初はAutoに切り替えると暴走してた。
いろいろ試したが、サーボのリバースをどのようにかけるかの問題と出力の制限で解消できた感じ。
サーボが逆に動くのは、ラジコン送信機設定、SBUS読み取りの設定、サーボ出力の設定の3か所でリバース設定ができるが、Autoではラジコンは関係なくなるので、ボートとPixhawkとの関係が上手くいってないとだめなので、サーボ出力の部分を船体に合わせないといけないようだ。
あと、出力が大きすぎると急激に旋回して方向を見失ってしまう。フルパワーフル舵でぐるぐる回ってしまうことがあった。こうなるとGPSの方向が狂うし制御の遅れがでるのだろう。
回路基板Tシャツ
なんだか派手なデザインのTシャツを頂きました。

電子部品の載った回路基板のTシャツです。
卓球のチームの練習に着て行ってみました。
他人の来ているTシャツのデザインにはあまり関心ないようです、理系じゃないとピンとこないかも。
練習終わりに、製造業の会社社員の方に、自分は恥ずかしくて着れない、と言われました。
aliexpressとかTemuで買えるようです。
amazonにも似たようなものはありますが、1桁高いです。
回路基板3DプリントTシャツ
電子部品の載った回路基板のTシャツです。
卓球のチームの練習に着て行ってみました。
他人の来ているTシャツのデザインにはあまり関心ないようです、理系じゃないとピンとこないかも。
練習終わりに、製造業の会社社員の方に、自分は恥ずかしくて着れない、と言われました。
aliexpressとかTemuで買えるようです。
amazonにも似たようなものはありますが、1桁高いです。
回路基板3DプリントTシャツ

