


カメラのケーブル長について
カメラを水中にぶら下げて水底を撮ろうと思ってます。
とりあえず、5mの切り売りの6Cのロボットケーブルを買いました。
巻取りも考えて高屈曲性ケーブルで細いです。
スリップリングも間にいれて、接続してみます。
懸念事項は、ケーブルの長さによるインピーダンス。
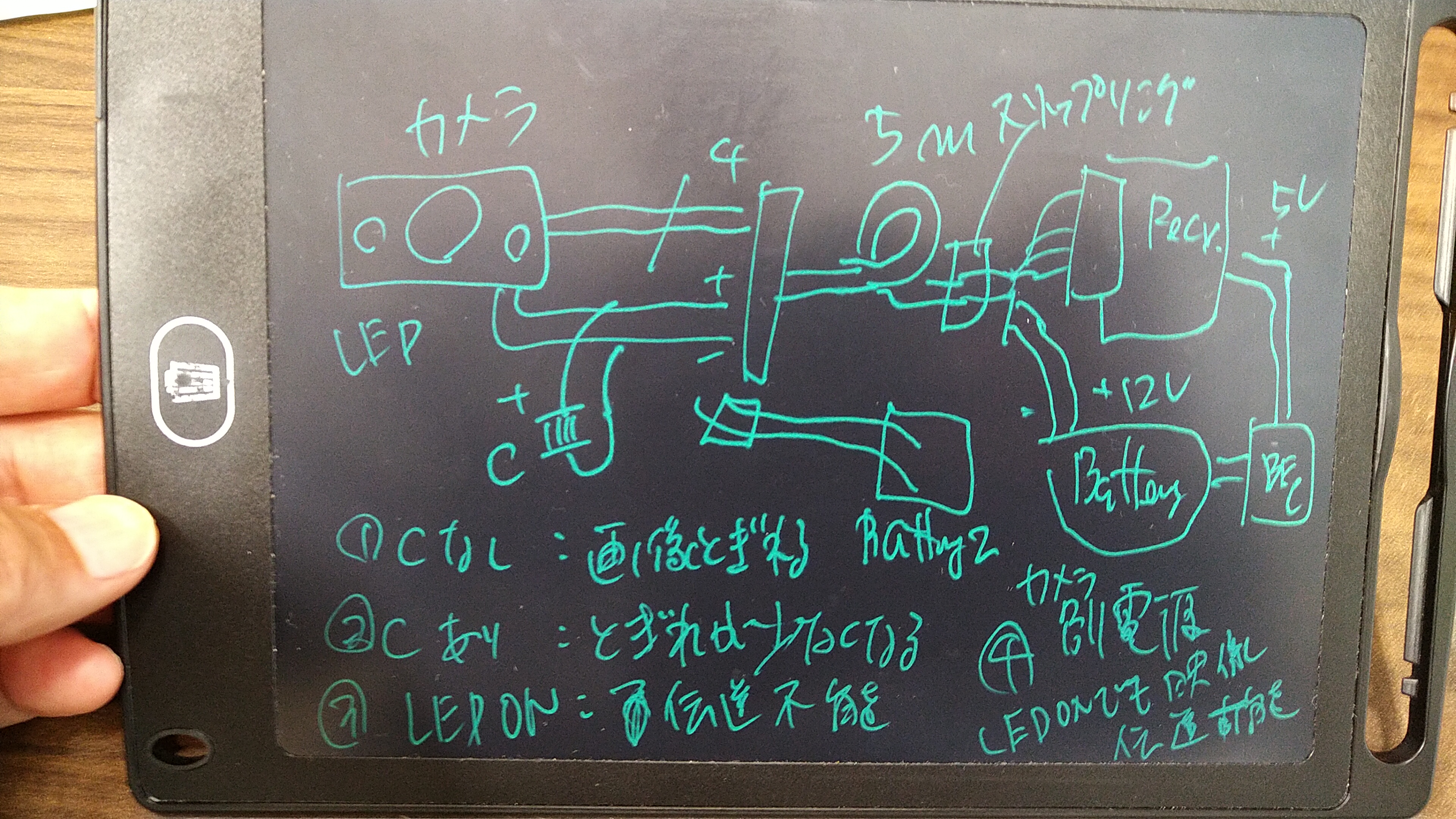
手書きの結線。
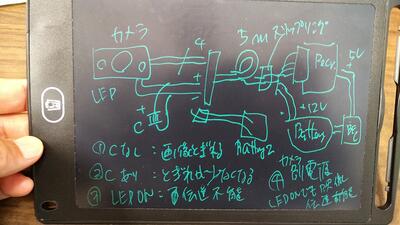
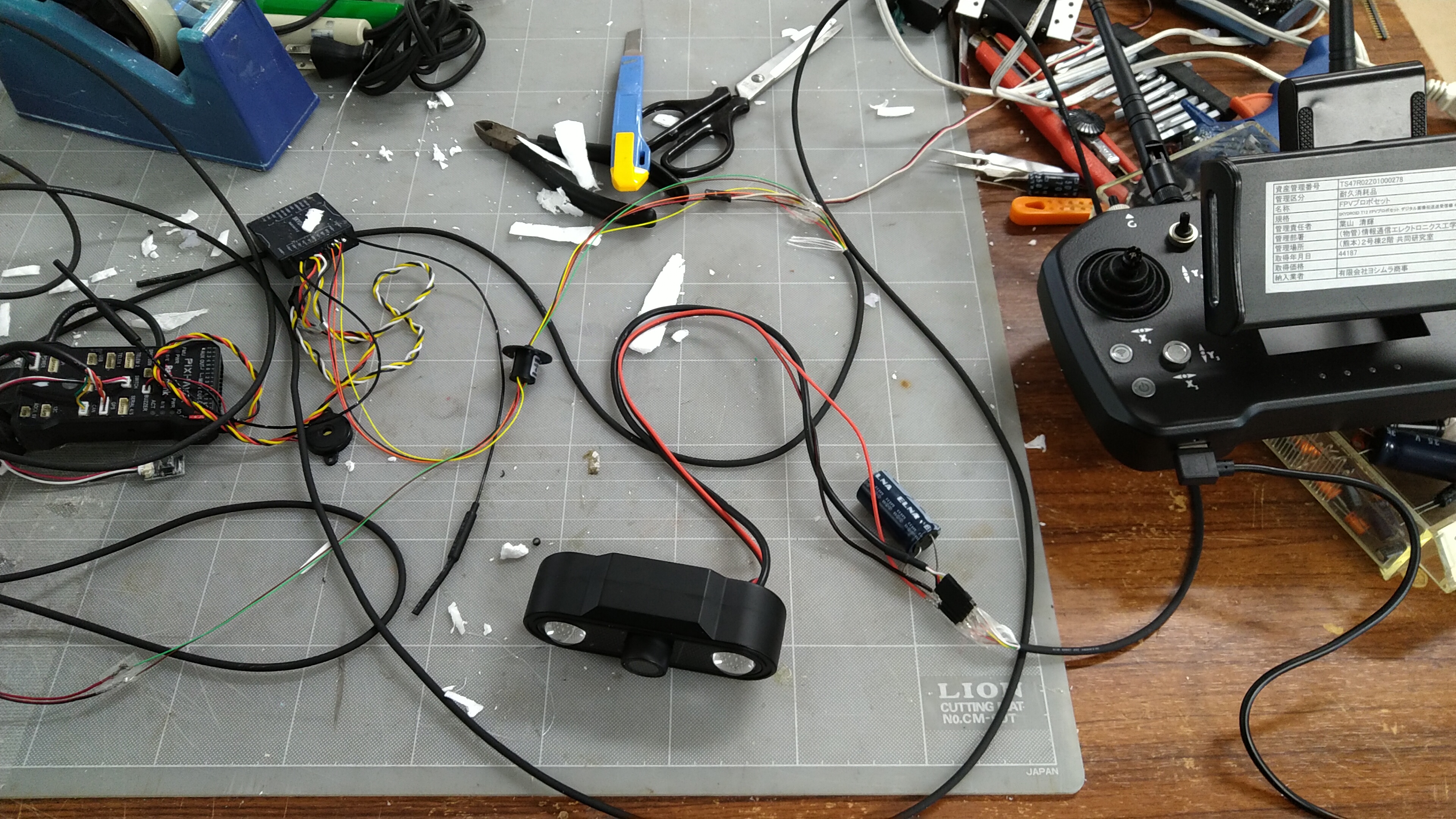
その写真。

やっぱり映像が乱れます。全く映らないわけではないですがとぎれとぎれ。
信号が遅れてるのか、レスポンスが悪いのか、電源線の容量が不十分なのか。
最初試したのが、カメラの電源ケーブルの近くに大きめの電解コンデンサを入れてみました。
すると、とぎれが少なくなり、電源が一番怪しいことが分かります。
カメラに照明用LEDがついてるので点灯してみたら、映像が止まってしまいました。
やっぱり電源を何とかしないといけない。
逆にカメラの電源線の方から電力供給して、5mケーブルの先のBECや受信機を動かしてみると、やっぱり映像が途切れます。
これは画像伝送を行ってる受信機の電力不足、ケーブルのインピーダンスが邪魔してます。
考えた末の解決策は、カメラ用に別電源を積むこと。カメラ内の回路とLED点灯は身近なバッテリーを使い、信号を送るのみ。
受信機側はモーター駆動にも使うバッテリーからBECで電源供給。
そうすると、映像もスムーズで、LED点灯しても映像が切れることはなくなりました。
LEDを点灯してカメラと受信機で300mA,LEDに300mAくらい流れてたので、カメラ用電源は4-500mA必要だけど、3セル500mAくらいの電源を積んでおけば1時間くらいは持つでしょう。
amazonから購入したのはこの5mのタイプ
協和ハーモネット スリムロボットケーブル KRT AWG28 X 6C 3m
とりあえず、5mの切り売りの6Cのロボットケーブルを買いました。
巻取りも考えて高屈曲性ケーブルで細いです。
スリップリングも間にいれて、接続してみます。
懸念事項は、ケーブルの長さによるインピーダンス。
手書きの結線。
その写真。
やっぱり映像が乱れます。全く映らないわけではないですがとぎれとぎれ。
信号が遅れてるのか、レスポンスが悪いのか、電源線の容量が不十分なのか。
最初試したのが、カメラの電源ケーブルの近くに大きめの電解コンデンサを入れてみました。
すると、とぎれが少なくなり、電源が一番怪しいことが分かります。
カメラに照明用LEDがついてるので点灯してみたら、映像が止まってしまいました。
やっぱり電源を何とかしないといけない。
逆にカメラの電源線の方から電力供給して、5mケーブルの先のBECや受信機を動かしてみると、やっぱり映像が途切れます。
これは画像伝送を行ってる受信機の電力不足、ケーブルのインピーダンスが邪魔してます。
考えた末の解決策は、カメラ用に別電源を積むこと。カメラ内の回路とLED点灯は身近なバッテリーを使い、信号を送るのみ。
受信機側はモーター駆動にも使うバッテリーからBECで電源供給。
そうすると、映像もスムーズで、LED点灯しても映像が切れることはなくなりました。
LEDを点灯してカメラと受信機で300mA,LEDに300mAくらい流れてたので、カメラ用電源は4-500mA必要だけど、3セル500mAくらいの電源を積んでおけば1時間くらいは持つでしょう。
amazonから購入したのはこの5mのタイプ
協和ハーモネット スリムロボットケーブル KRT AWG28 X 6C 3m

