LED電球の分解、その1
LED電球が故障して極端に暗くなってしまいました。

なので捨てる前に感謝を込めて分解。
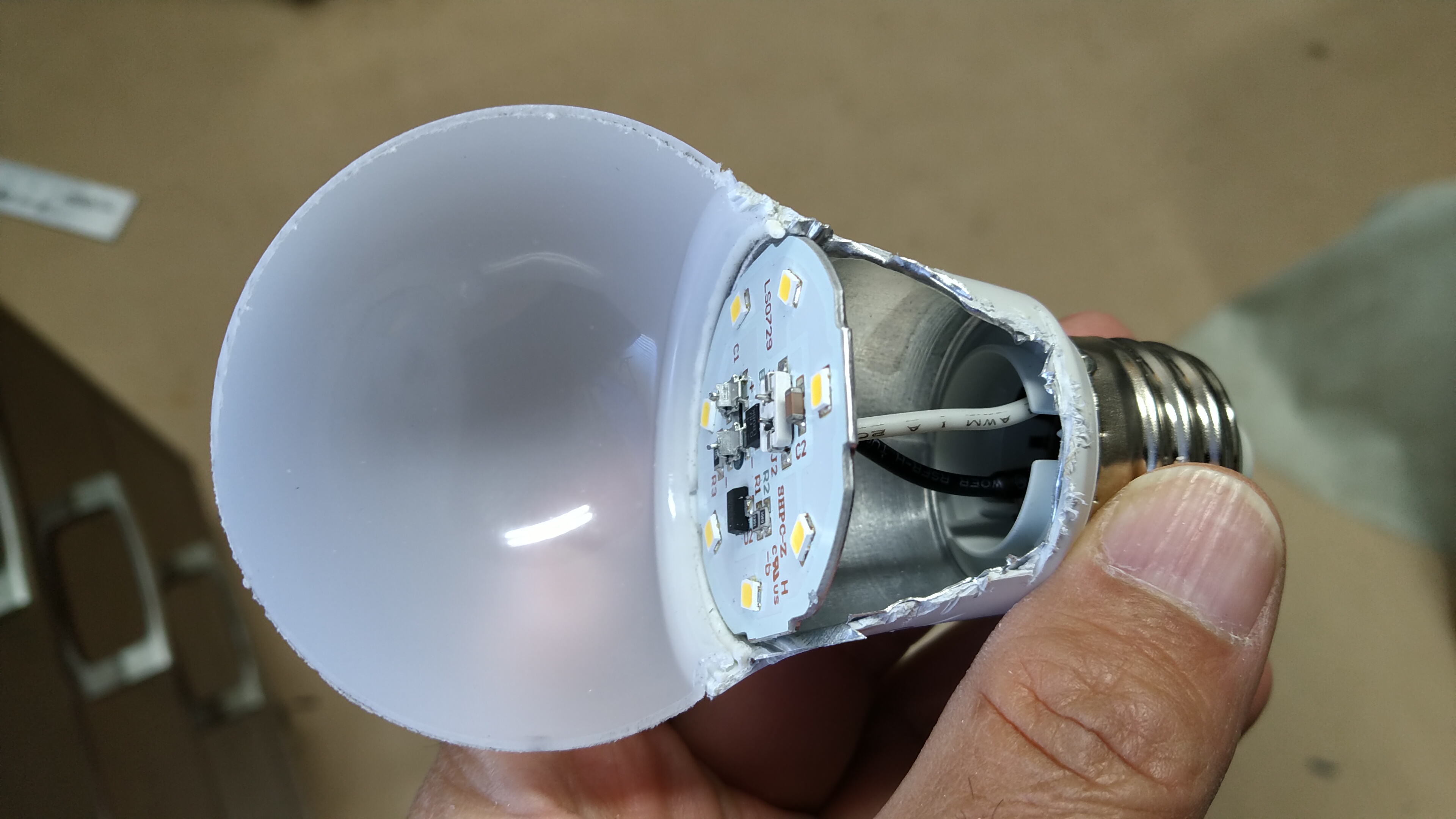
接着されてて分解困難だったのでバンドソーでカット。
電球部分はガラスじゃなくてプラです。

基板はこれだけ。

配線もこれだけ。

この状態で恐る恐る点灯してみました。

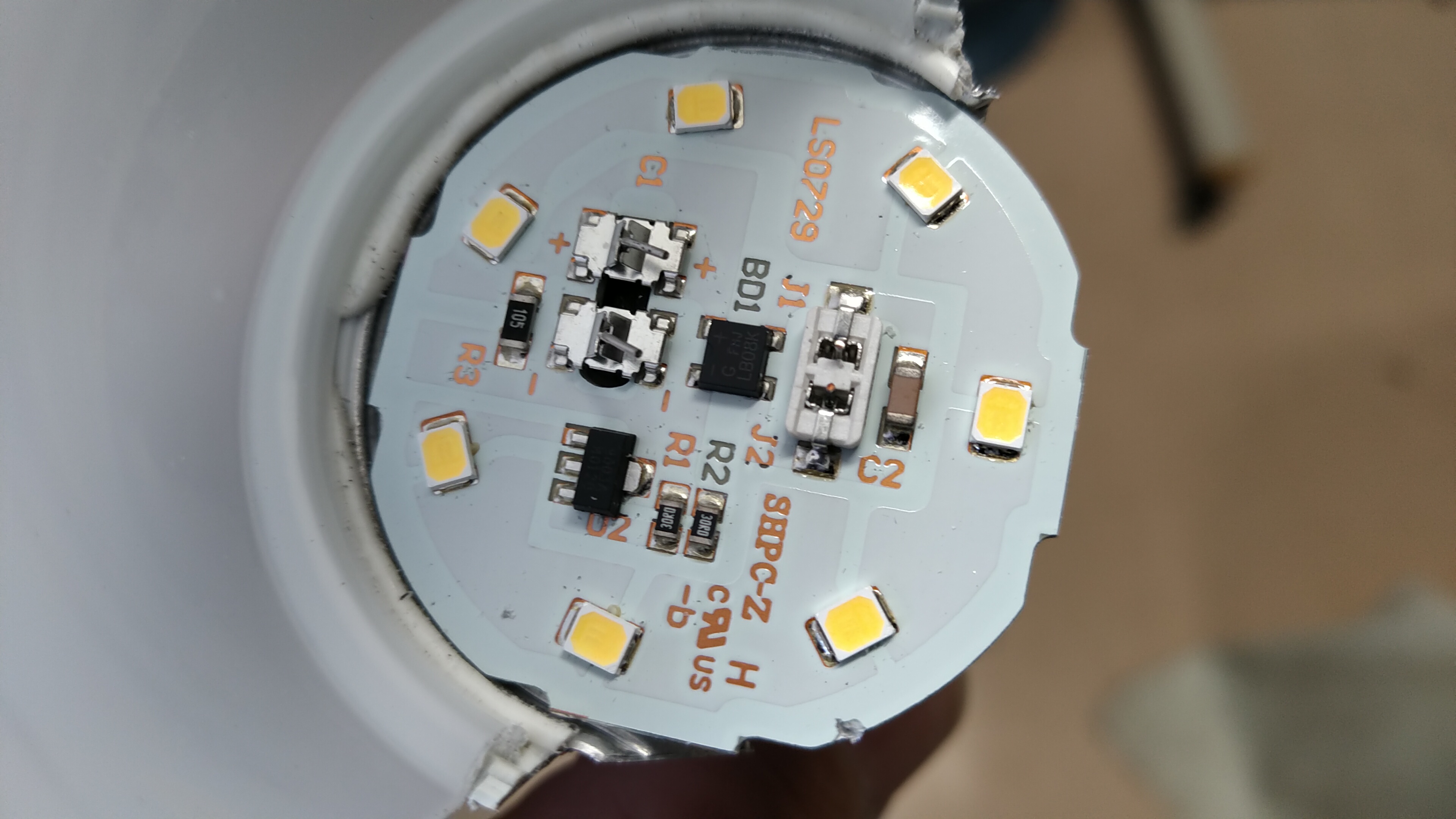
基板の裏面はアルミ?と思われる金属。根元部分も金属でたぶん放熱のためです。
なので、カットした状態で点灯は熱的にも危険。
頑張ってる感のある電解コンデンサは耐圧200V.

なので捨てる前に感謝を込めて分解。
接着されてて分解困難だったのでバンドソーでカット。
電球部分はガラスじゃなくてプラです。
基板はこれだけ。
配線もこれだけ。

この状態で恐る恐る点灯してみました。

基板の裏面はアルミ?と思われる金属。根元部分も金属でたぶん放熱のためです。
なので、カットした状態で点灯は熱的にも危険。
頑張ってる感のある電解コンデンサは耐圧200V.


水上ドローンの製作、その3
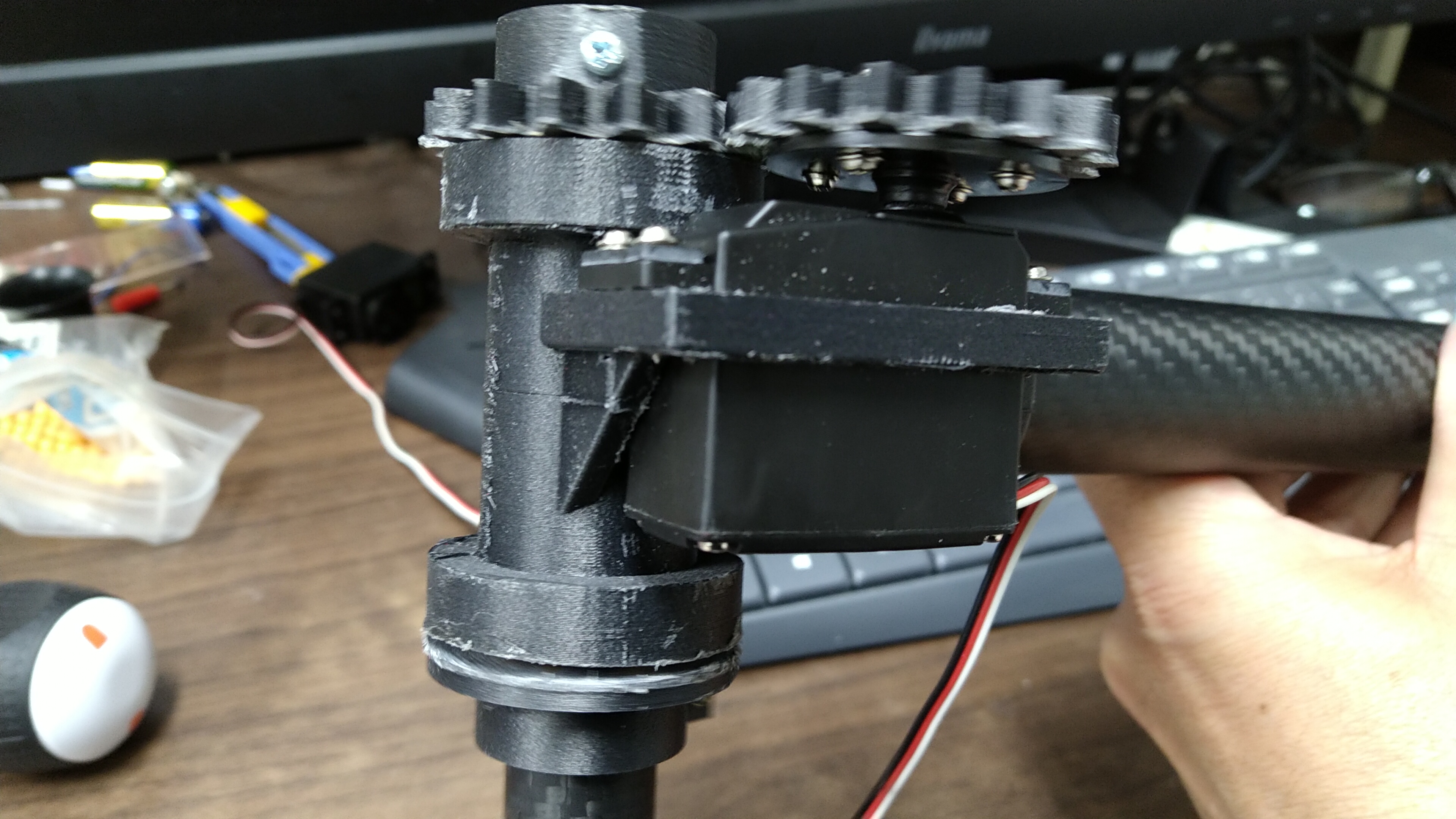
調整して、組み立て。
いちおう最初に想定した通りにはできた。

動かしてみた動画はこちら。
作って分かった。
ベアリングは買った方が安心。
既存の製品を真似て作るのは無駄な努力。面白いけど。
いちおう最初に想定した通りにはできた。
動かしてみた動画はこちら。
作って分かった。
ベアリングは買った方が安心。
既存の製品を真似て作るのは無駄な努力。面白いけど。

水上ドローンの製作、その2
エアガンの弾があったので何か使えないかと思ってベアリングにしてみようと思った。
3Dプリンタで設計して弾を入れてみると1個はみ出る。
内径を広げて調整できないことはないけど、結構シビアな設計しないといけないので企画倒れだったかも。

3Dプリンタで設計して弾を入れてみると1個はみ出る。
内径を広げて調整できないことはないけど、結構シビアな設計しないといけないので企画倒れだったかも。

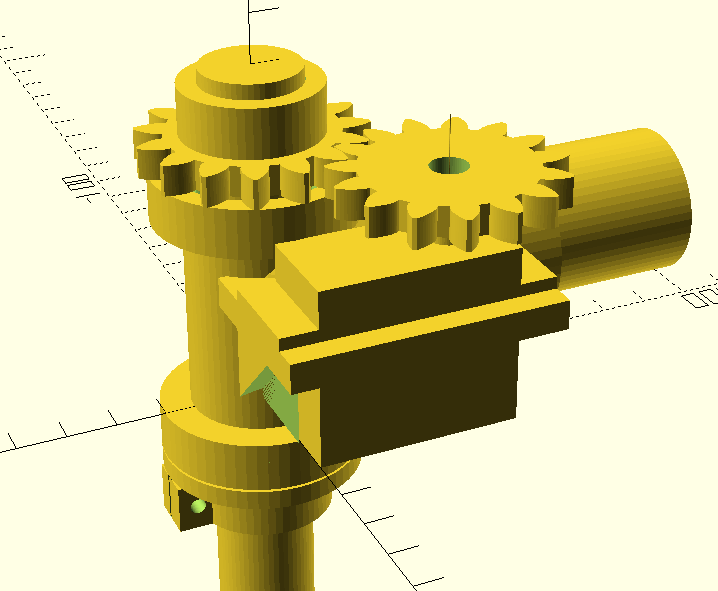
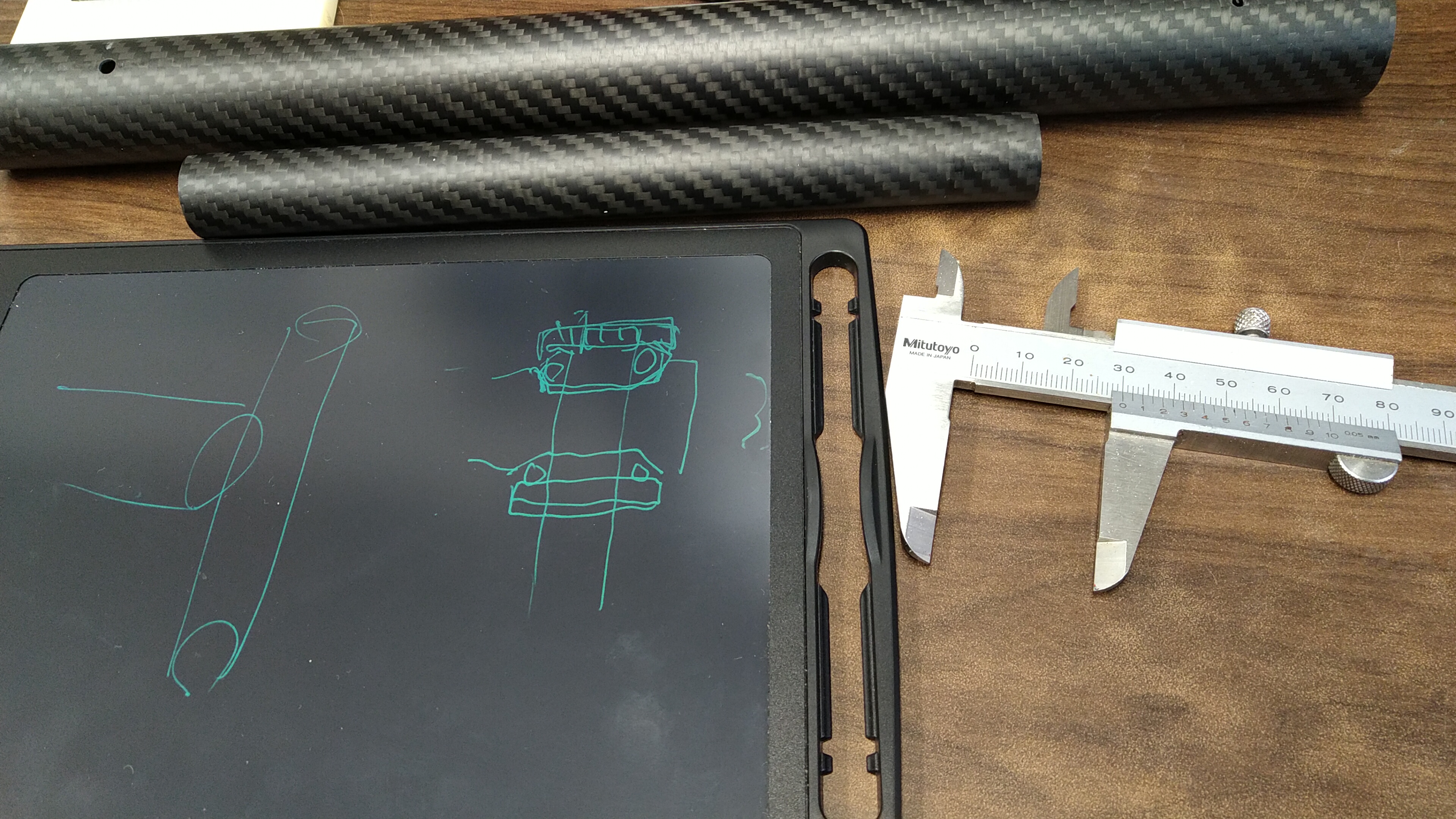
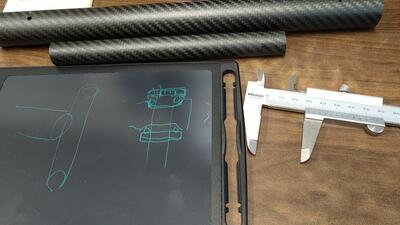
次の工作案(ロッドをクロスして回転させるやつ、そのはじまり)
とりあえず何を作るかは置いておいて、部材を探したら、30㎜と20㎜の太いカーボンパイプのジャンクがでてきたので、これを回転するように直交して接続したい。
どういう部品を作るか考え中。
どういう部品を作るか考え中。