Arduinoで自作のフライトコントローラでクワッドコプター
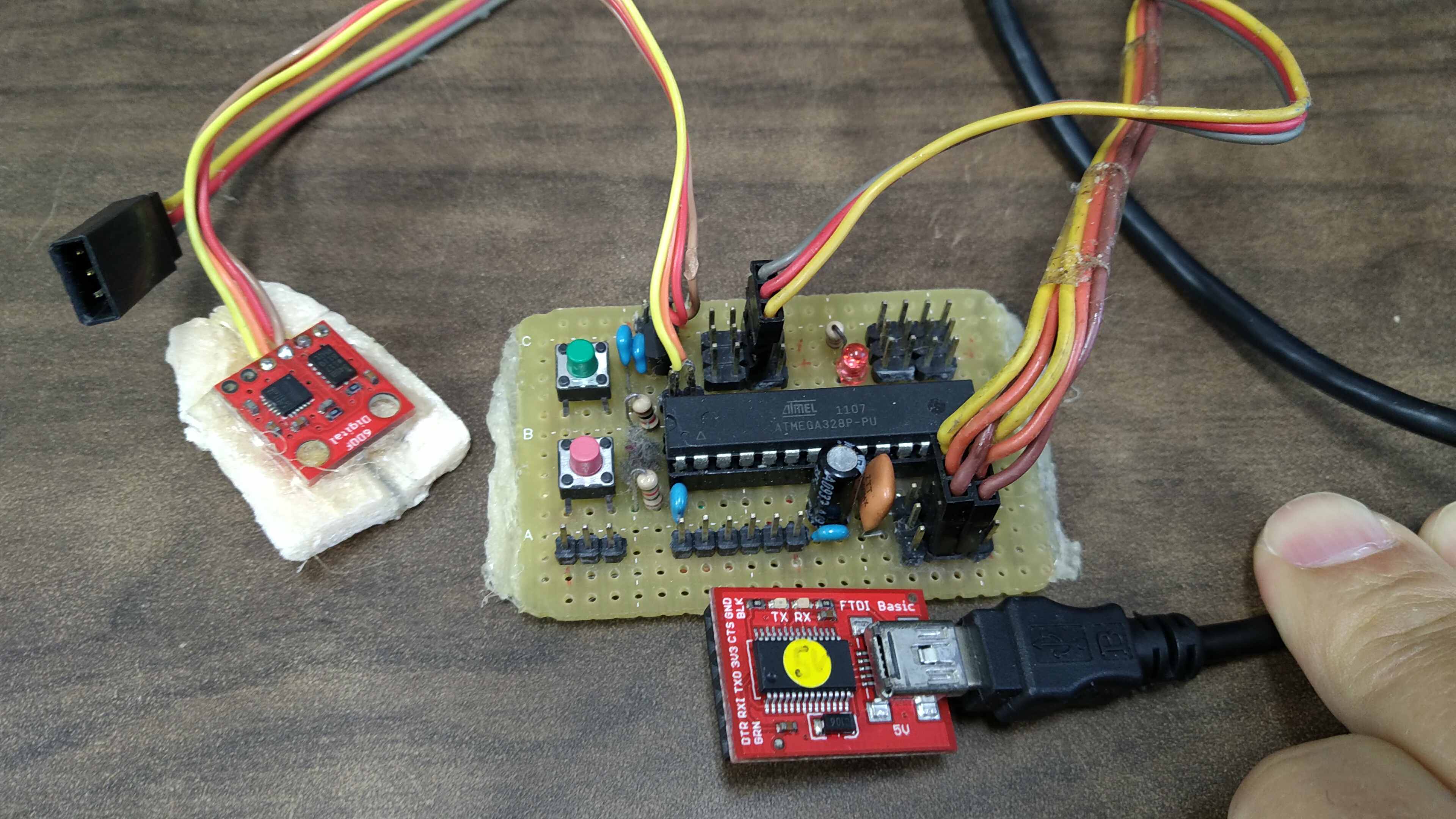
10年くらい前に作った、自作のフライトコントローラが探したら出てきました。ArduinoのIDEでAtmega328PにUSBシリアル変換を使ってプログラムを書き込み。
受信機の信号を4チャンネル入れて、クワッド区コプター用にESCの出力を4チャンネル持ってて6DOFのIMUをI2Cで読みとって、あとはソフト頑張ってギリギリ浮くくらいまでには作りました。
数学的に弱いので移動平均と積算で簡易的なフィルタを作って姿勢を読み取って制御してたのでなかなか厳しかったです。
その時の動画はこちら。
これよりもう少し安定するところまでできたのですが、APMを購入したので乗せ換えてしまって動画は残ってませんでした。
今は、昨日試したMadgwickフィルタとか簡単に使えるライブライブラリが用意されてるのでもっと安定して飛ばせるかも。
受信機の信号を4チャンネル入れて、クワッド区コプター用にESCの出力を4チャンネル持ってて6DOFのIMUをI2Cで読みとって、あとはソフト頑張ってギリギリ浮くくらいまでには作りました。
数学的に弱いので移動平均と積算で簡易的なフィルタを作って姿勢を読み取って制御してたのでなかなか厳しかったです。
その時の動画はこちら。
これよりもう少し安定するところまでできたのですが、APMを購入したので乗せ換えてしまって動画は残ってませんでした。
今は、昨日試したMadgwickフィルタとか簡単に使えるライブライブラリが用意されてるのでもっと安定して飛ばせるかも。



