水中ドローンの製作、その5
作ってる水中ドローンは、深さがほぼ一定で水深2m前後の所を航行するもの、できれば自動航行させたいという用途です。割と広い海域での航行なので、ケーブルに束縛されたくない、ならばケーブルの長さを限定して、フロートに受信機を乗せて引っ張れば良いのじゃないか、という考えです。
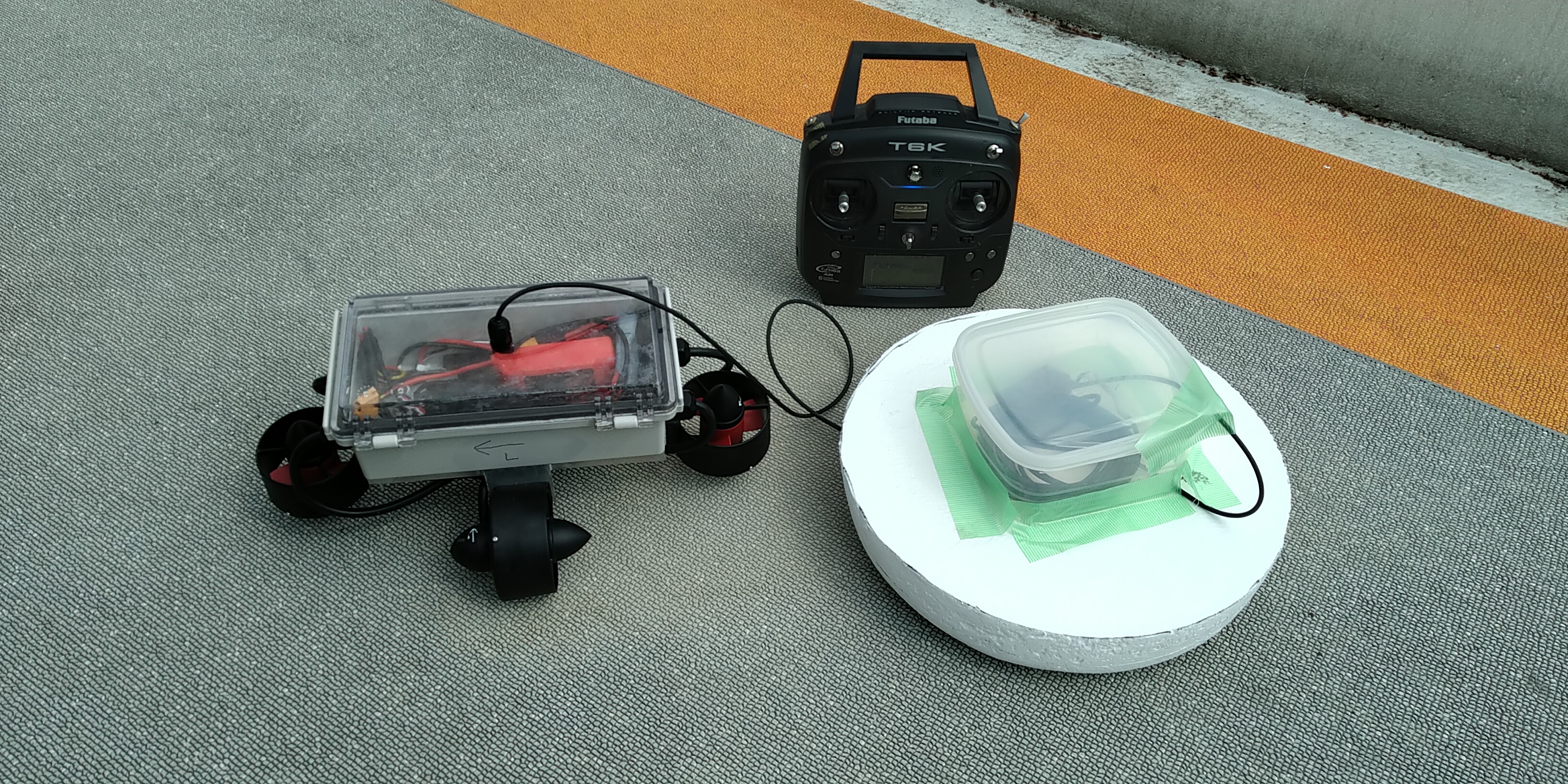
なので、発泡スチロールで丸いフロートを削って、受信機のケーブルを通し、念のため水没しないようにタッパーに入れて固定。

プールの水深は深い所でも1.5m程度なので、それ以下で1mより長いくらいで調整して長さを固定。

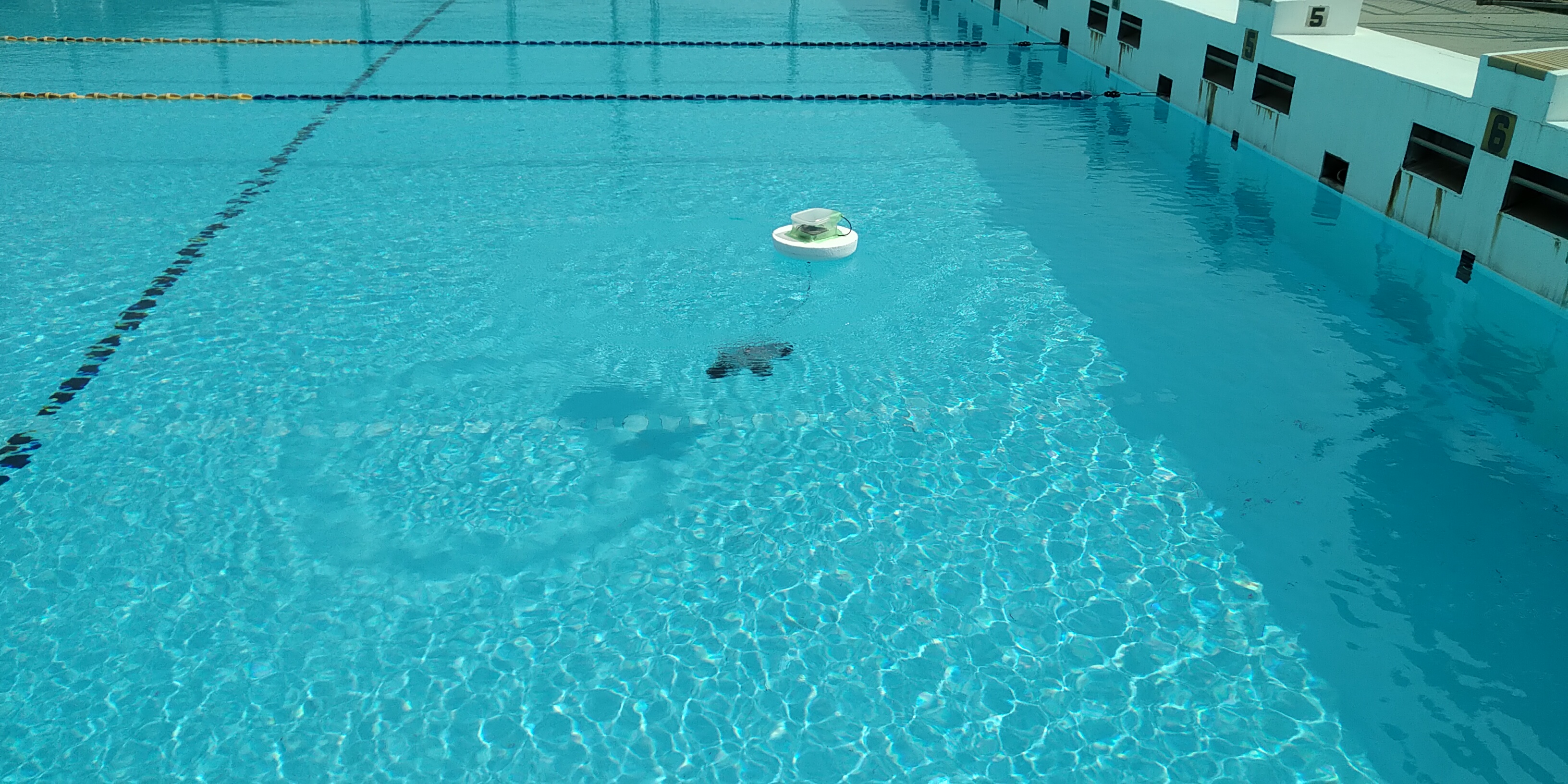
プールにフロートと船体とも浮かべてみました。

ここで、前後スラスターを回して沈降。

そのまま、左右スラスターで操舵。操作通りに水中で動いてます。

その時の動画。
なので、発泡スチロールで丸いフロートを削って、受信機のケーブルを通し、念のため水没しないようにタッパーに入れて固定。
プールの水深は深い所でも1.5m程度なので、それ以下で1mより長いくらいで調整して長さを固定。

プールにフロートと船体とも浮かべてみました。

ここで、前後スラスターを回して沈降。

そのまま、左右スラスターで操舵。操作通りに水中で動いてます。
その時の動画。



