10軸センサ
9軸センサがいまいち信用できないので、違う方法で検索。
10DOF BMP280で検索すると、9軸+気圧センサで、10軸の製品を出してくれる。これで9軸と間違って6軸が入ってることはないでしょう。
BMP280はボッシュの高精度気圧センサ。
MPU-9250+BMP280でたくさん出てくるのでどれか選べばいいけど、レビューがほとんどないので不安はある。販売店のしっかりしたところ(他の商品でのレビューが高いところ)を選べば大丈夫でしょう。
10DOF BMP280で検索すると、9軸+気圧センサで、10軸の製品を出してくれる。これで9軸と間違って6軸が入ってることはないでしょう。
BMP280はボッシュの高精度気圧センサ。
MPU-9250+BMP280でたくさん出てくるのでどれか選べばいいけど、レビューがほとんどないので不安はある。販売店のしっかりしたところ(他の商品でのレビューが高いところ)を選べば大丈夫でしょう。


センサ購入。
お休みなのでネットで適当に技術系の記事をみてたらセンサがお安くなってるようなのでいくつか購入。
以前は、といっても5-6年前は9軸センサ1万円だったけど今は1000円ちょっと。6軸は6-8000円だったと思うけど今は400円くらい。
なので、アマゾンから
MPU-6050、3軸アナログ ジャイロ センサー + 3軸加速度計モジュール 16ビットADコンバーターのデータ出力 IIC I2C for Arduino を1個、
BMP280、 3.3V I2C IIC デジタル大気圧、温度、高度センサー モジュールを1個
をポチッた。
もう一つ、9軸センサMPU-9250も安いので注文入れて下の方までスクロールすると、偽商品で実際は6軸しかないとのレビューが多数、慌てて注文取消し。
以前は、といっても5-6年前は9軸センサ1万円だったけど今は1000円ちょっと。6軸は6-8000円だったと思うけど今は400円くらい。
なので、アマゾンから
MPU-6050、3軸アナログ ジャイロ センサー + 3軸加速度計モジュール 16ビットADコンバーターのデータ出力 IIC I2C for Arduino を1個、
BMP280、 3.3V I2C IIC デジタル大気圧、温度、高度センサー モジュールを1個
をポチッた。
もう一つ、9軸センサMPU-9250も安いので注文入れて下の方までスクロールすると、偽商品で実際は6軸しかないとのレビューが多数、慌てて注文取消し。
ArduinoNanoEveryを使ったマイクロマウスの構想 その3
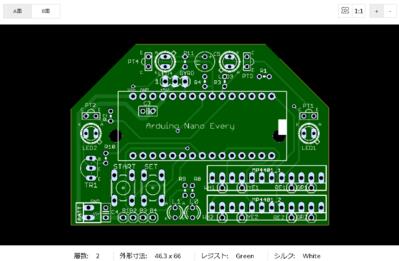
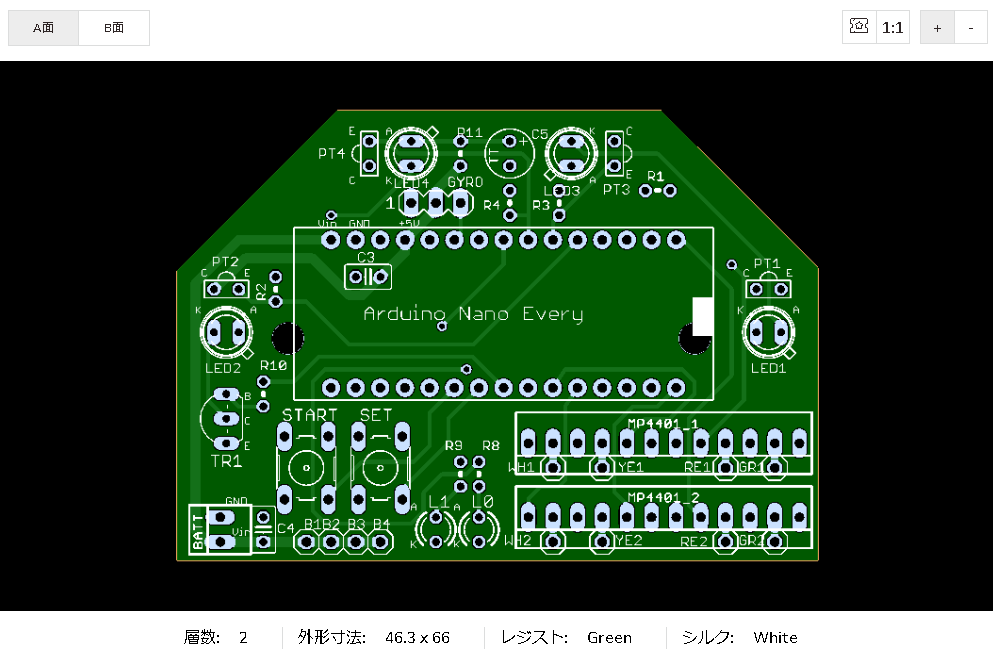
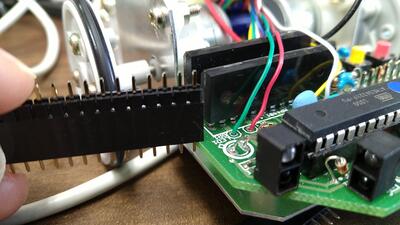
急ぎじゃない基板発注。PCBGOGOでロゴ入りだったら基板0円、送料1500円、Paypal支払い手数料150円くらい。1か月待ち。

ArduinoNanoEveryを使ったマイクロマウスの構想 その2
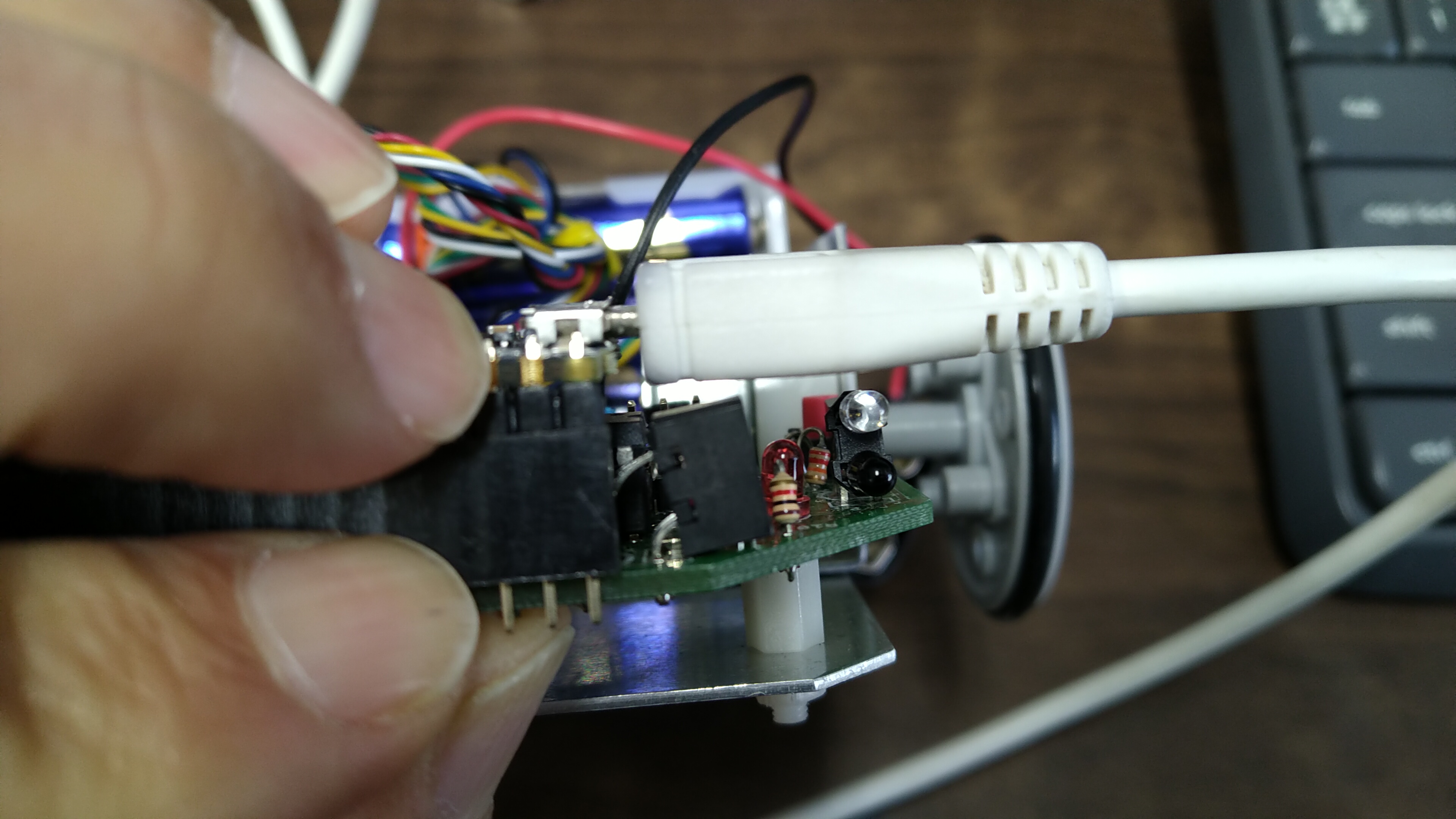
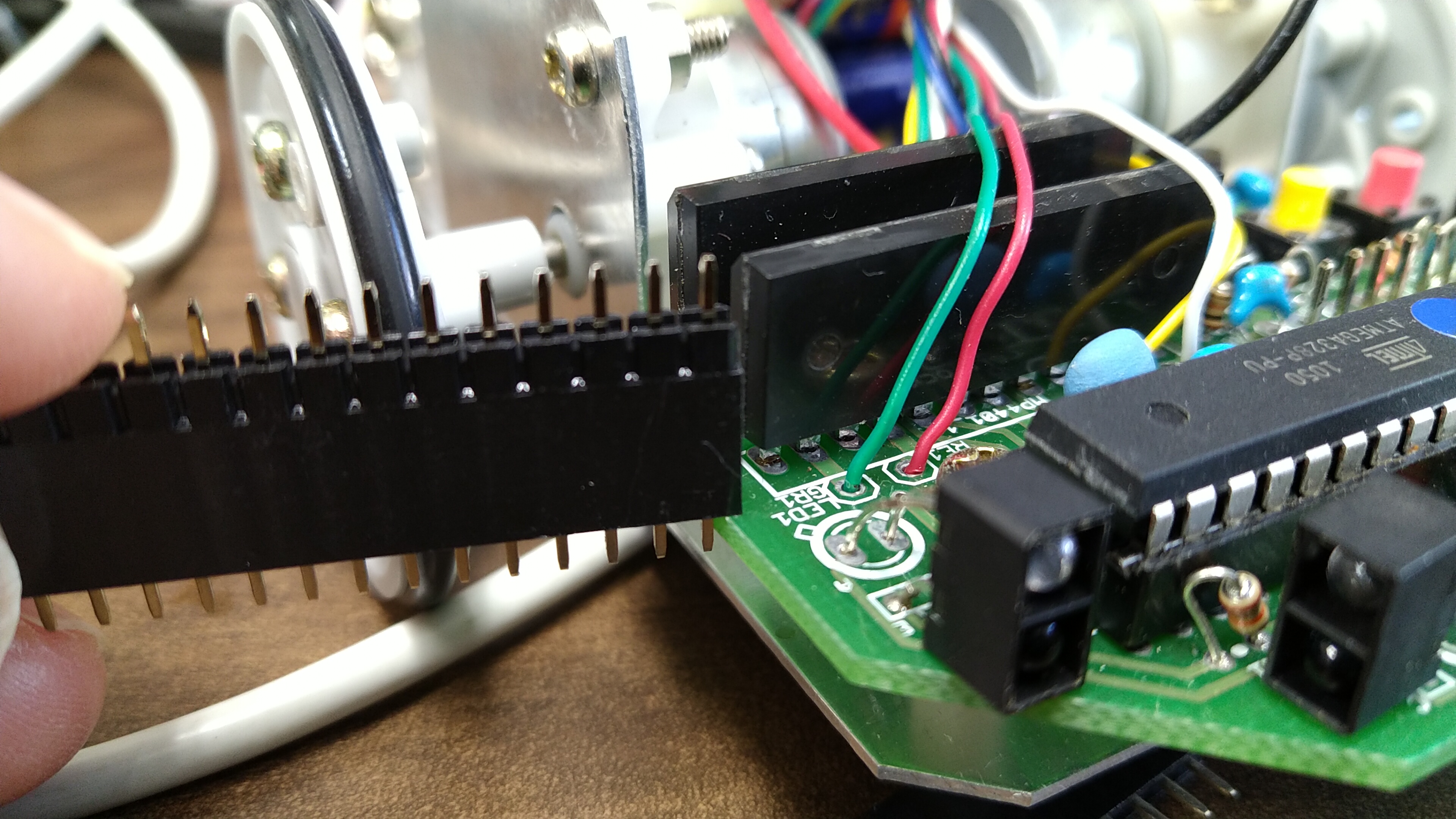
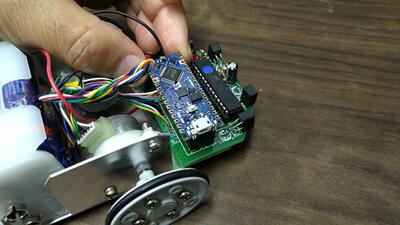
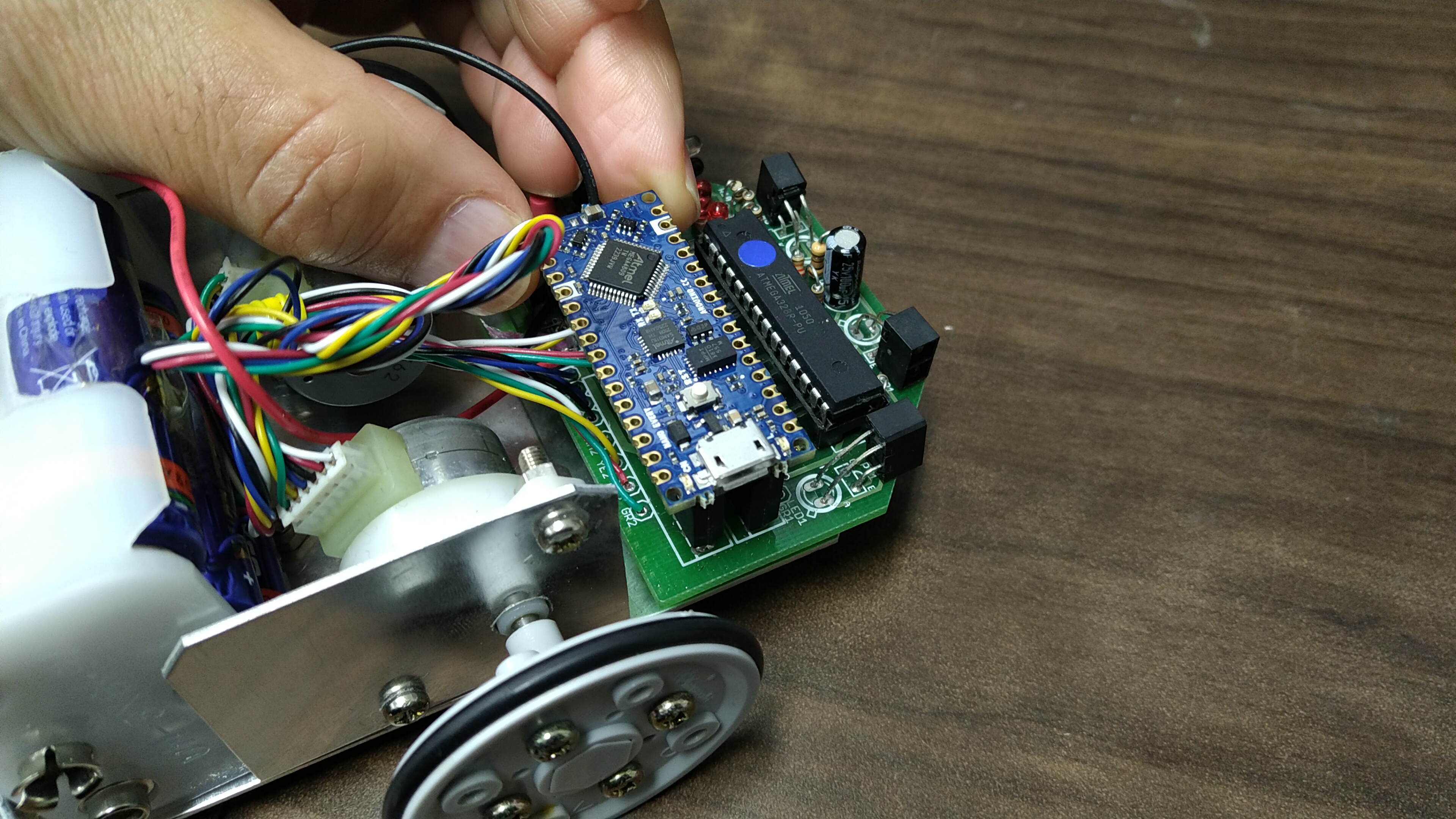
昨日気になってた、基板の高さと部品の干渉を実際に並べて比較。光センサの高さがケーブルのコネクタ部分と干渉しないか気になってたのですが、大丈夫のようです。
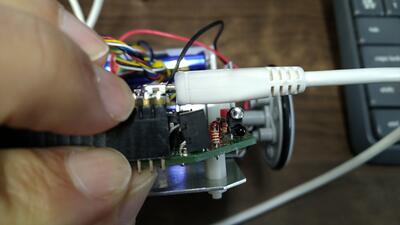
ほか、電解コンデンサの高さは干渉するので逃がす。
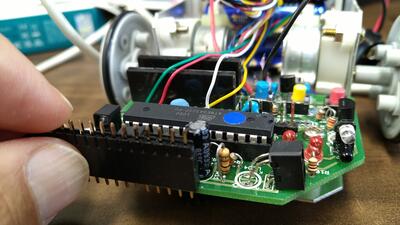
モータードライバ用ICも逃がさないとだめ。
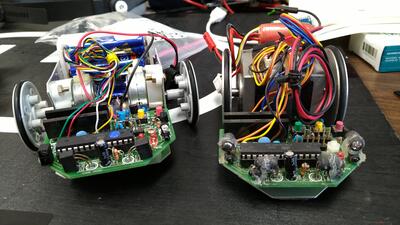
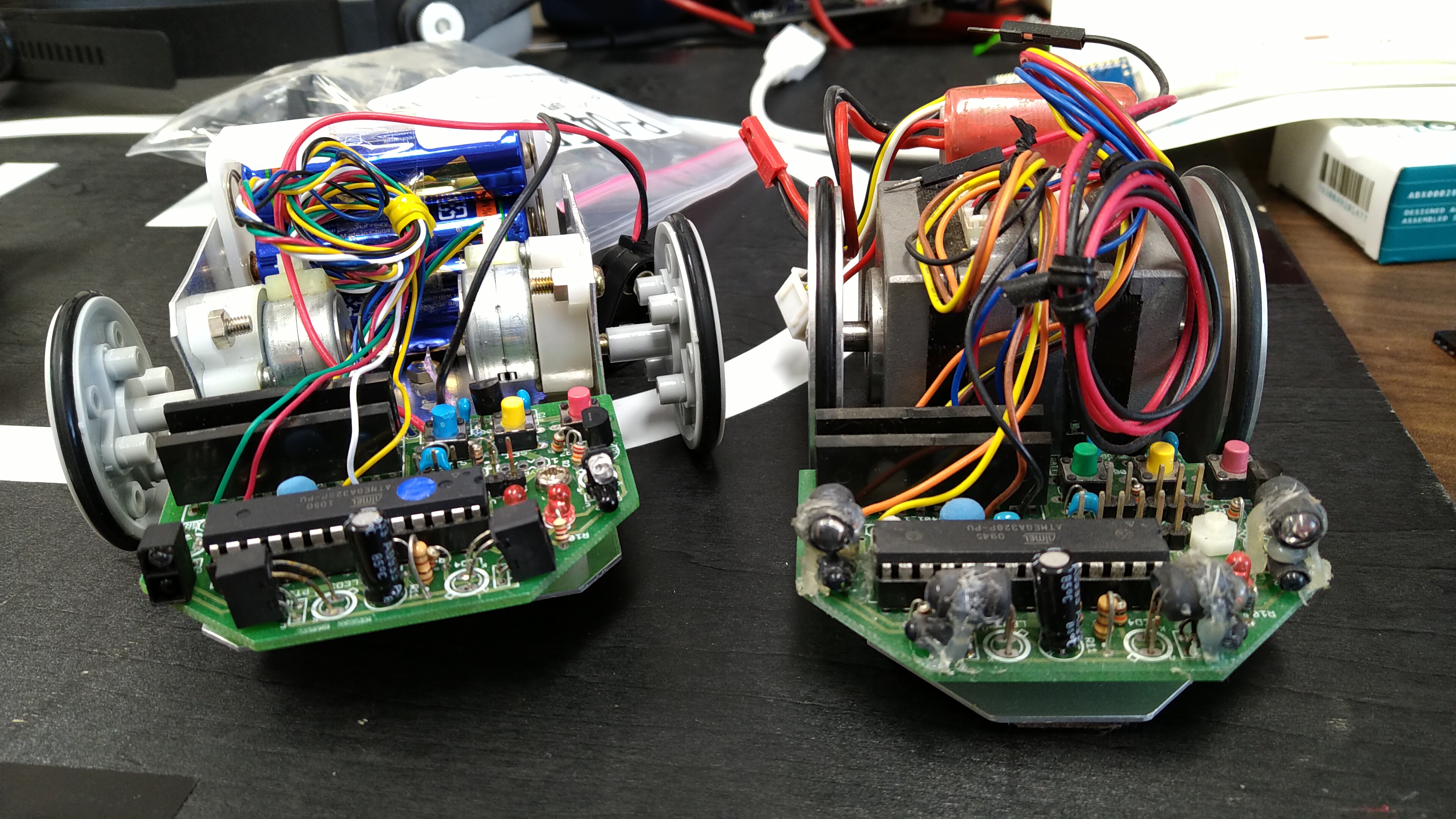
この基板の寸法は安価なステッピングモータで作るだけでなく、定番のステッピングモータで斜め走行できる幅に収まっています。あとは、ソフト的に2相励磁で回した時の追従速度で速度限界が決まります。
ほか、電解コンデンサの高さは干渉するので逃がす。
モータードライバ用ICも逃がさないとだめ。
この基板の寸法は安価なステッピングモータで作るだけでなく、定番のステッピングモータで斜め走行できる幅に収まっています。あとは、ソフト的に2相励磁で回した時の追従速度で速度限界が決まります。
ArduinoNanoEveryを使ったマイクロマウスの構想 その1
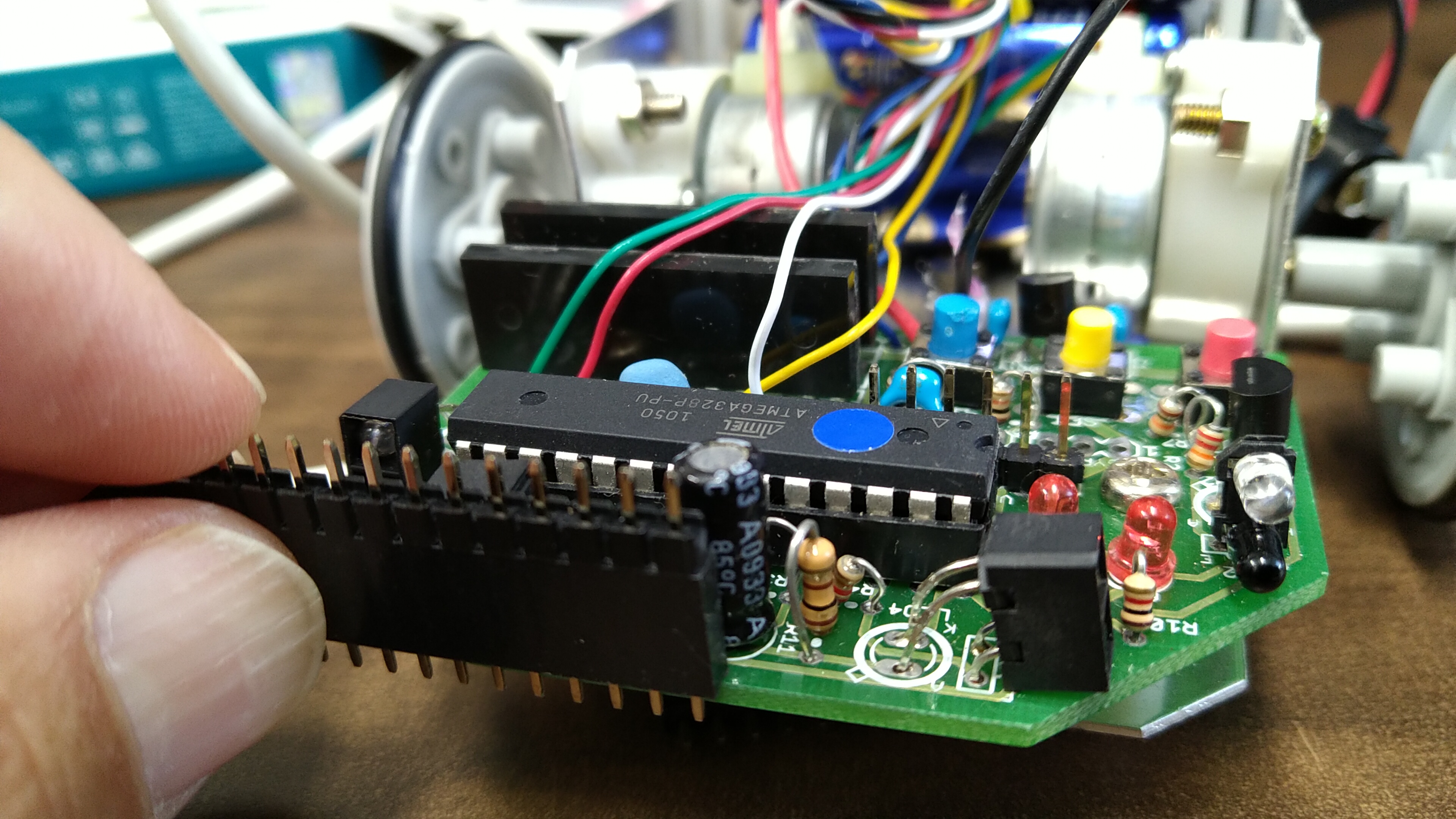
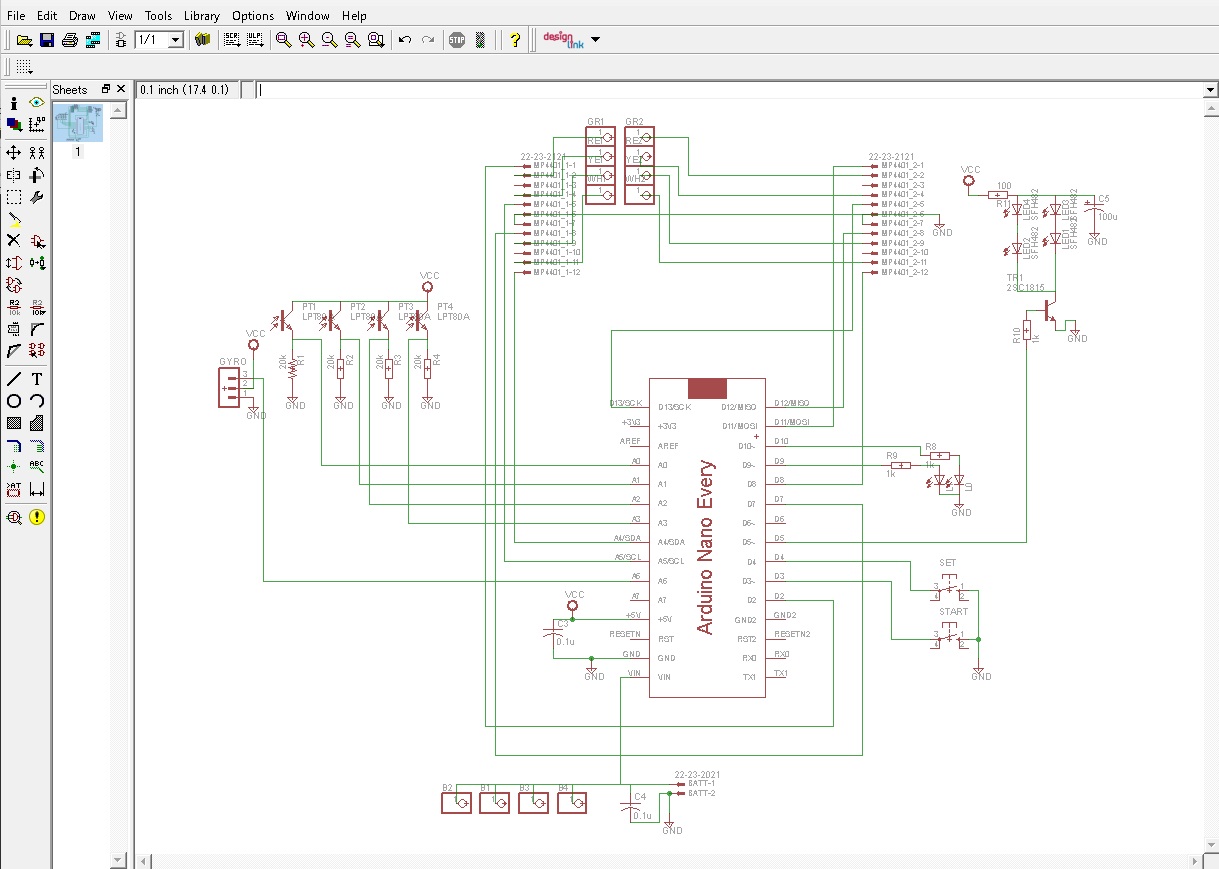
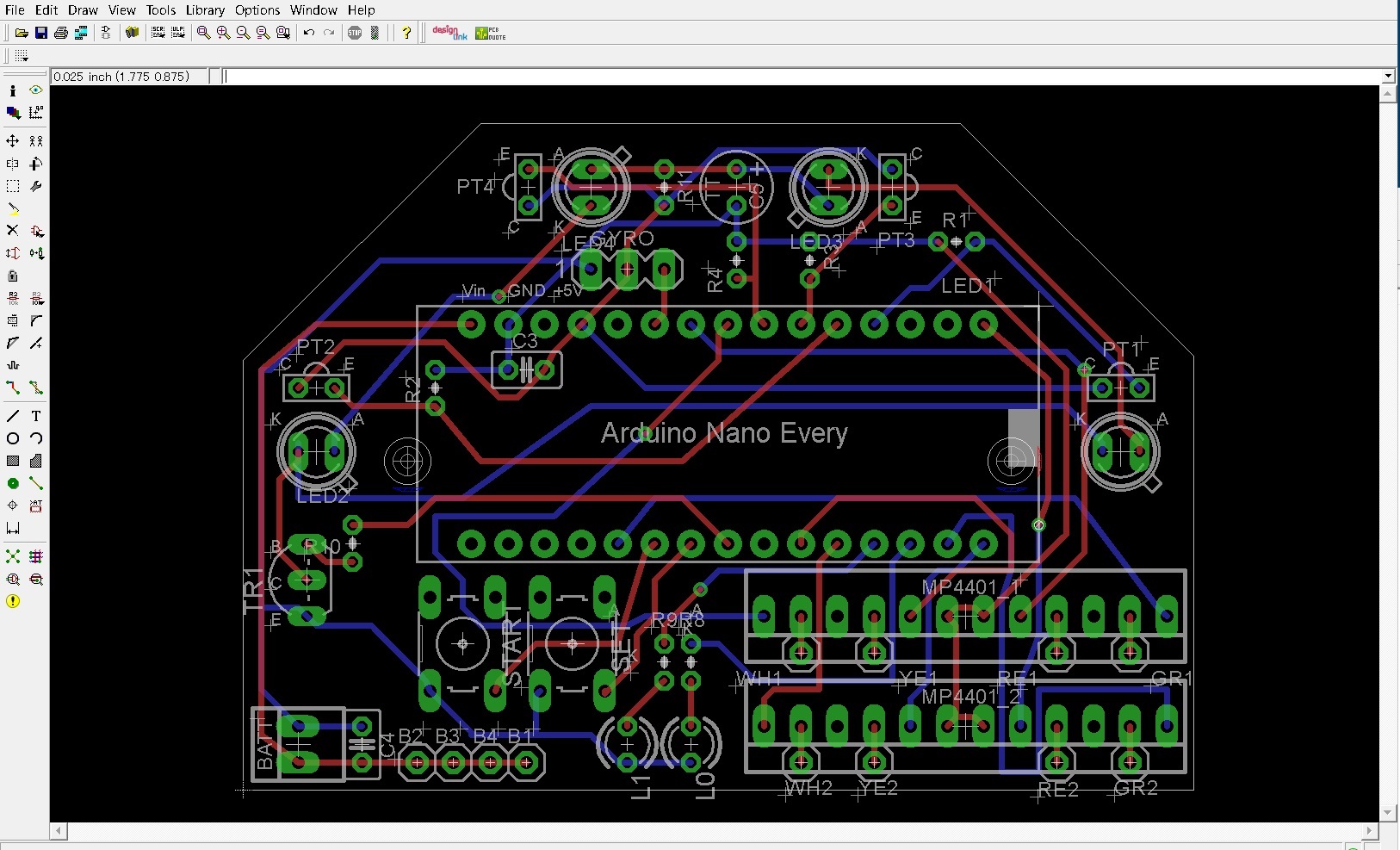
なんかマウスもできそうなので、試しに以前設計した回路図のAtmega328をArduinoNanoEveryに差し替えて配線しなおし。
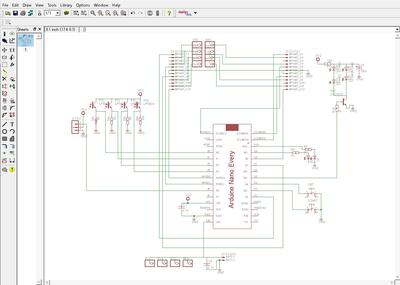
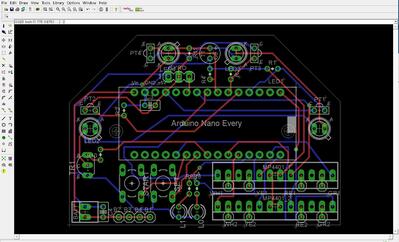
適当にに基板に基板に載せて自動配線。
あっさりと配線してくれて残り数本、これくらいなら少し考えれば配線できるかも。
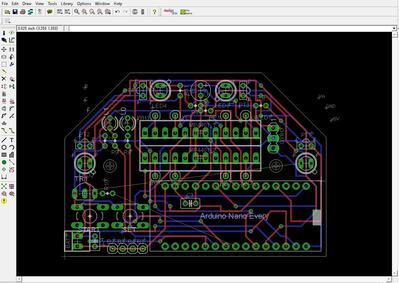
でも、基板上ギリギリの場所にArduinoを載せてるので配置を確認したら、タイヤと干渉しそう。
失敗、やり直しです。
--追記--
ボードの位置を修正して配線できるか確認。これでできそうですがまだ修正必要。
でも今度は、書き込み時にフォトセンサが干渉しそう。
このまま頑張れば、マウスもできそうですが、部品の在庫がないし、特に頼まれたわけでもないので、製作は余裕ができてから。
適当にに基板に基板に載せて自動配線。
あっさりと配線してくれて残り数本、これくらいなら少し考えれば配線できるかも。
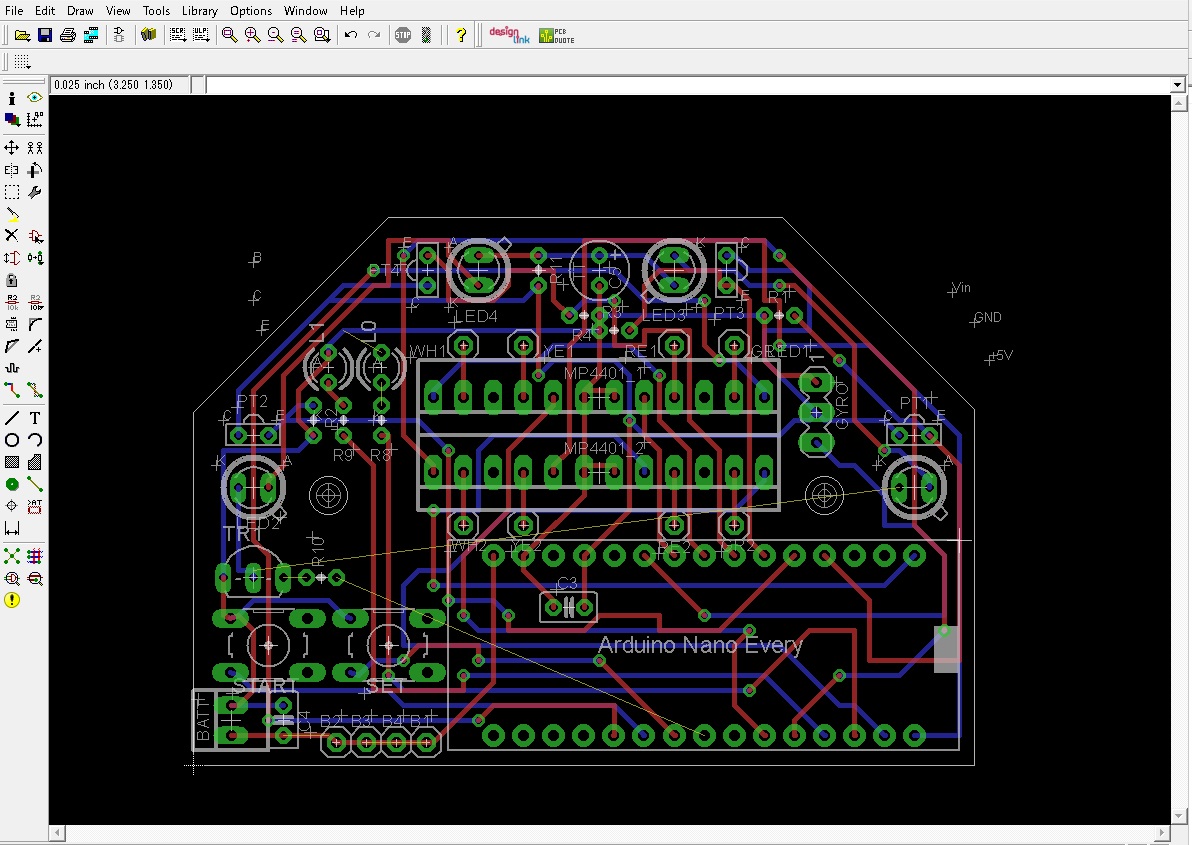
でも、基板上ギリギリの場所にArduinoを載せてるので配置を確認したら、タイヤと干渉しそう。
失敗、やり直しです。
--追記--
ボードの位置を修正して配線できるか確認。これでできそうですがまだ修正必要。
でも今度は、書き込み時にフォトセンサが干渉しそう。
このまま頑張れば、マウスもできそうですが、部品の在庫がないし、特に頼まれたわけでもないので、製作は余裕ができてから。

