水上ドローン その3
ネットで検索。
最後のロボセンが自分の欲しいイメージ通り。。。なので、自作するなら同じの作りたくないなぁ。
ダムの水質調査で活躍する水上ドローンの仕組み
https://newswitch.jp/p/21070
チック、水上ドローン「BlueBoat」販売開始。自律ナビゲーション機能付きで最大62時間稼働できる
https://www.drone.jp/news/2023112810162176873.html
水上ドローン活用で海洋マイクロプラスチック分析、珍しい調査開始
https://newswitch.jp/p/34194
エバーブルーテクノロジーズ、全長2m級「帆船型ドローン」自動操船と自律航行に成功
https://drone-journal.impress.co.jp/docs/special/1183086.html
Marine Drone(純国産水上ドローン)
https://prtimes.jp/main/html/rd/p/000000007.000023254.html
POWERDOLPHIN WIZARD 水上ドローン
https://www.drone-station.net/products/detail.php?product_id=19075
四胴型自動航行船(ロボセン)による自動水質計測
https://construction.tiisys.com/112827/
製品開発、動画あり
https://robosen.jp/
最後のロボセンが自分の欲しいイメージ通り。。。なので、自作するなら同じの作りたくないなぁ。
ダムの水質調査で活躍する水上ドローンの仕組み
https://newswitch.jp/p/21070
チック、水上ドローン「BlueBoat」販売開始。自律ナビゲーション機能付きで最大62時間稼働できる
https://www.drone.jp/news/2023112810162176873.html
水上ドローン活用で海洋マイクロプラスチック分析、珍しい調査開始
https://newswitch.jp/p/34194
エバーブルーテクノロジーズ、全長2m級「帆船型ドローン」自動操船と自律航行に成功
https://drone-journal.impress.co.jp/docs/special/1183086.html
Marine Drone(純国産水上ドローン)
https://prtimes.jp/main/html/rd/p/000000007.000023254.html
POWERDOLPHIN WIZARD 水上ドローン
https://www.drone-station.net/products/detail.php?product_id=19075
四胴型自動航行船(ロボセン)による自動水質計測
https://construction.tiisys.com/112827/
製品開発、動画あり
https://robosen.jp/


水上ドローン その2
昨日書いた4スラストの水上ドローンは、空中ドローンのようにホバリング、水上だと風や水流があってもアンカーで固定位置にとどめたり、前後左右に自由に動けるようにしてみたいという考えから。
こういうのは既に誰かやってるんだろうけど、車輪の再発明的に自分で一から考えてみてる。
ボートだったら最低2自由度あれば動けるんだから、スラスターを減らしてもいいだろうということで、クワッドじゃなくてトライコプターのように3つのスラストで一つをチルト?回転できるようにしたらどうか?
図を書いてみたら、これで十分いけるんでないか。
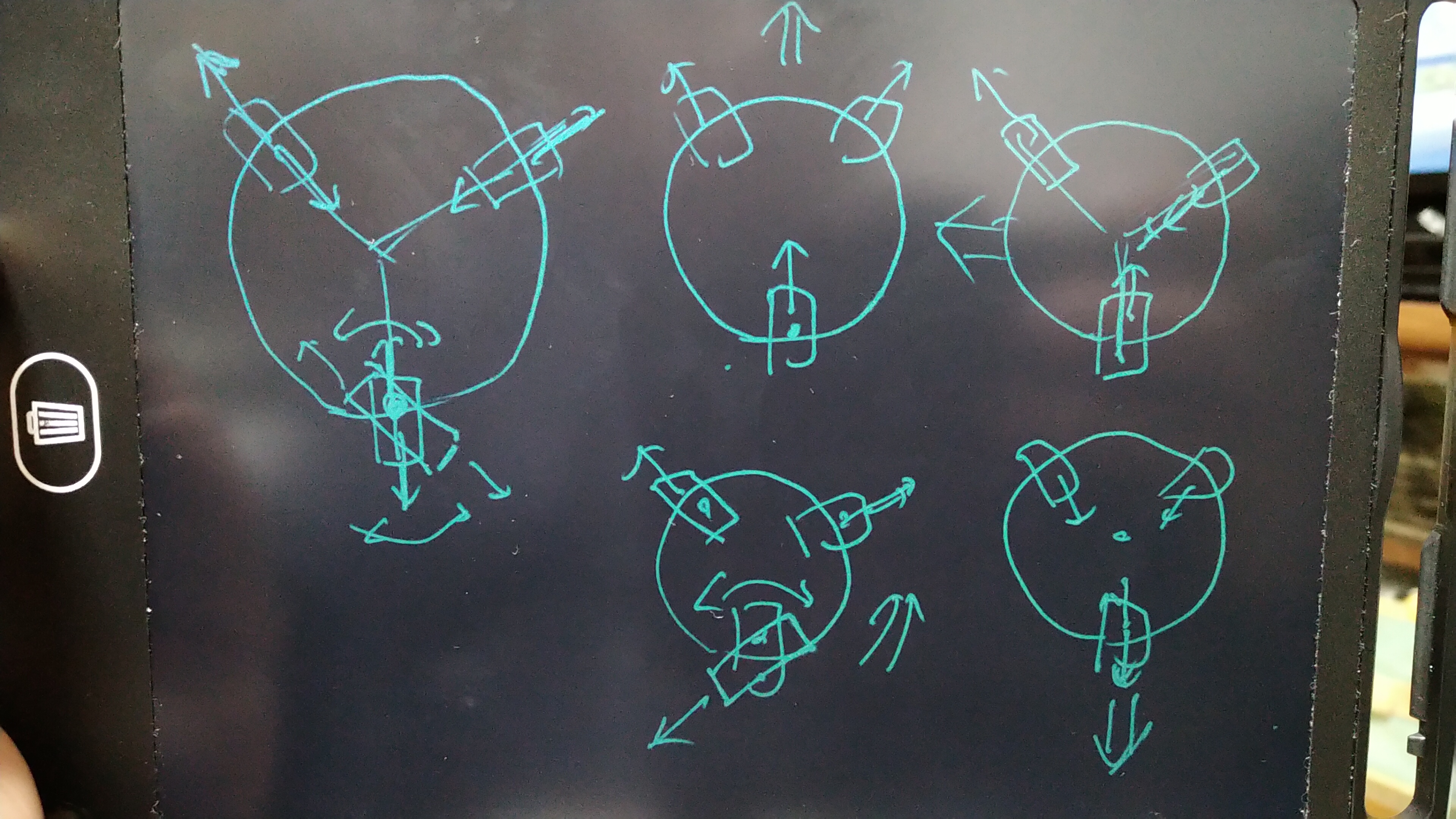
スラスター1個だけ回転させて向きを変えるのもなんかアンバランスな気がするので、中央にヨー軸旋回のための水車をつけて、3スラスターを固定にしてベクトル合成で移動方向を決めるとか、いっそのこと3スラスターを同時に回転させて向きを変えてみるとか...
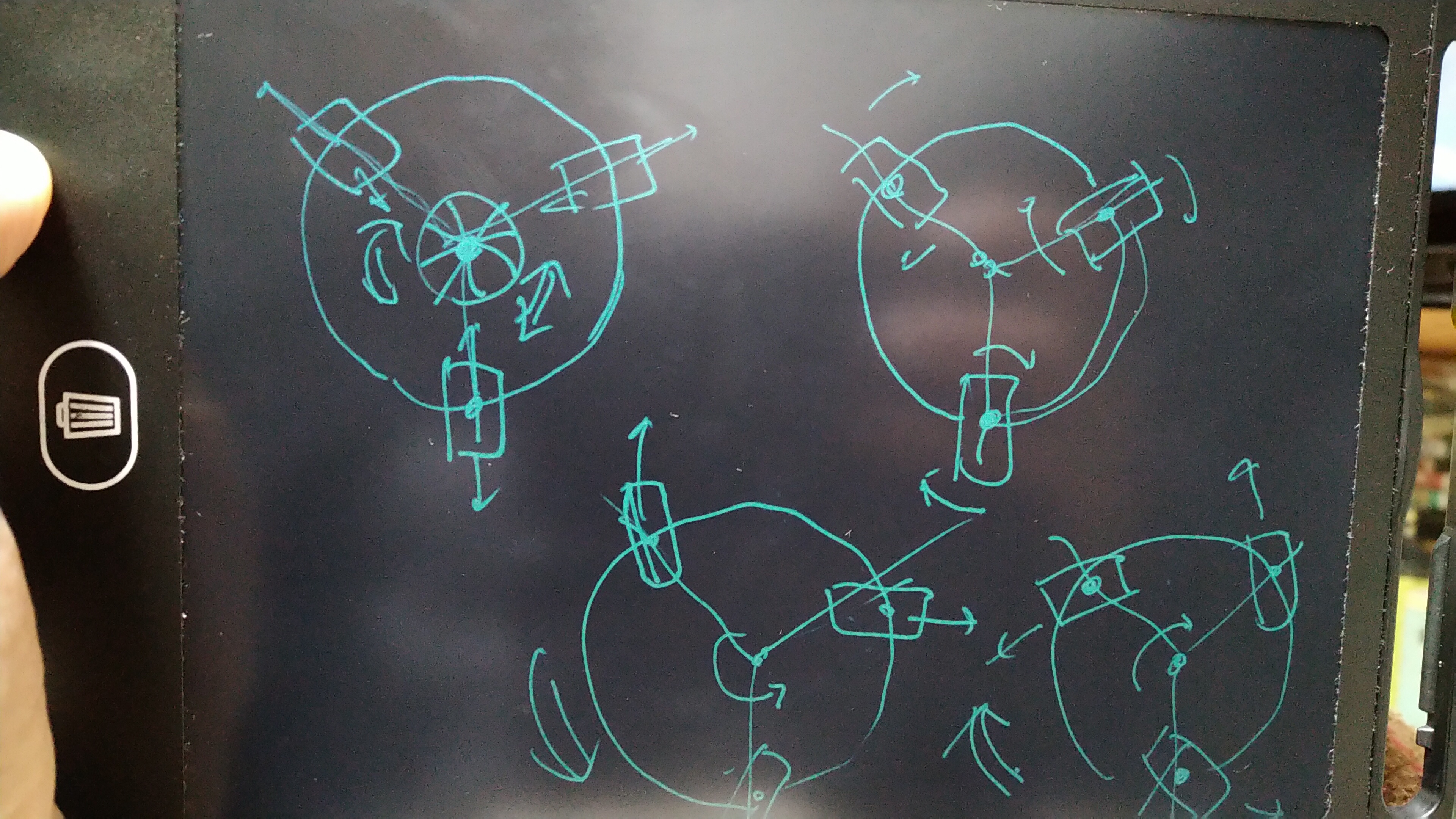
バイコプターみたいに2個のスラスターでは? ひとつを前後、もう一つを左右に分けて前後スラスターだけ回転させて向きを変えるとか。

それではアンバランスな感じがするので、2個を対称において、向きをそれぞれ自由に変えられるようにするとか。
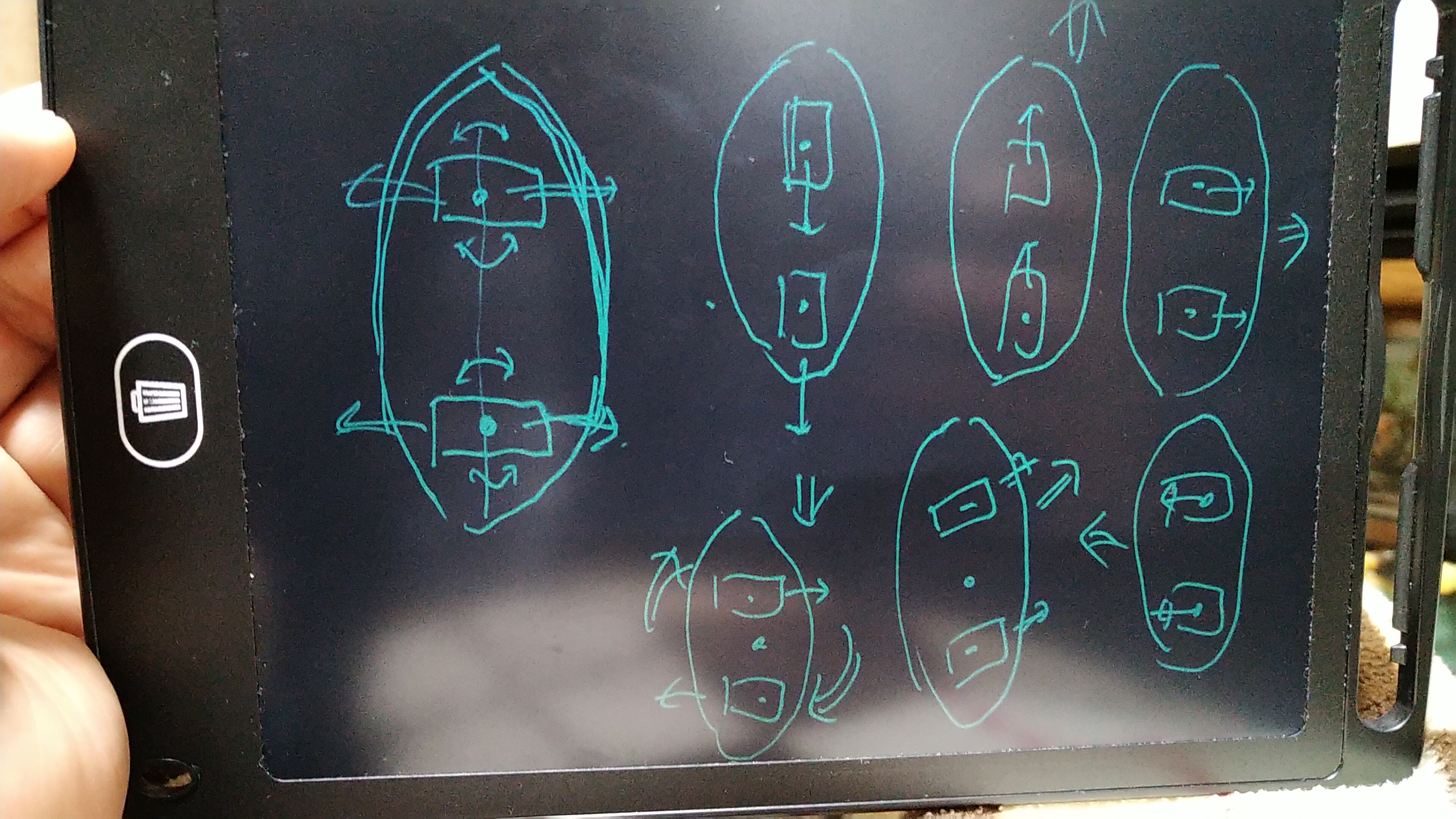
でもそれだと4自由度で冗長な感じがするので、2個のスラスターを対称においてベルトやギヤで連結して同じ方向に回転させても3自由度でも十分な気がする。
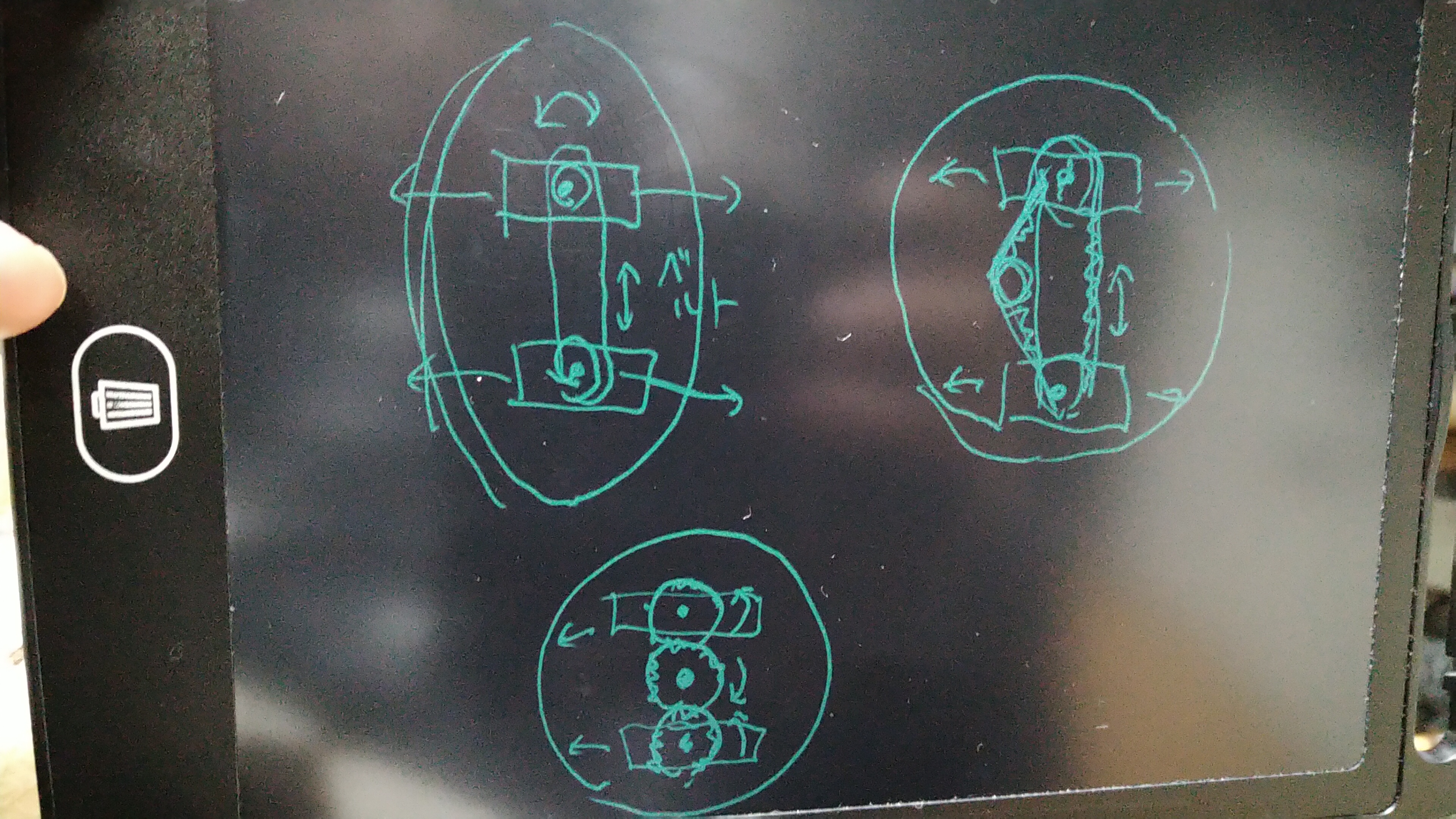
機械的な作りこみは必要だけど、作って面白そうなのは、最初のクワッド型か、最後のこれかな。
こういうのは既に誰かやってるんだろうけど、車輪の再発明的に自分で一から考えてみてる。
ボートだったら最低2自由度あれば動けるんだから、スラスターを減らしてもいいだろうということで、クワッドじゃなくてトライコプターのように3つのスラストで一つをチルト?回転できるようにしたらどうか?
図を書いてみたら、これで十分いけるんでないか。
スラスター1個だけ回転させて向きを変えるのもなんかアンバランスな気がするので、中央にヨー軸旋回のための水車をつけて、3スラスターを固定にしてベクトル合成で移動方向を決めるとか、いっそのこと3スラスターを同時に回転させて向きを変えてみるとか...
バイコプターみたいに2個のスラスターでは? ひとつを前後、もう一つを左右に分けて前後スラスターだけ回転させて向きを変えるとか。
それではアンバランスな感じがするので、2個を対称において、向きをそれぞれ自由に変えられるようにするとか。
でもそれだと4自由度で冗長な感じがするので、2個のスラスターを対称においてベルトやギヤで連結して同じ方向に回転させても3自由度でも十分な気がする。
機械的な作りこみは必要だけど、作って面白そうなのは、最初のクワッド型か、最後のこれかな。



