Arduino Nano Everyを使ったロボトレーサ(ライントレースロボット)の製作 その3
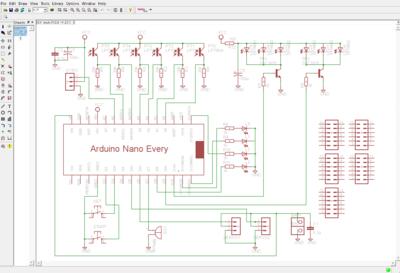
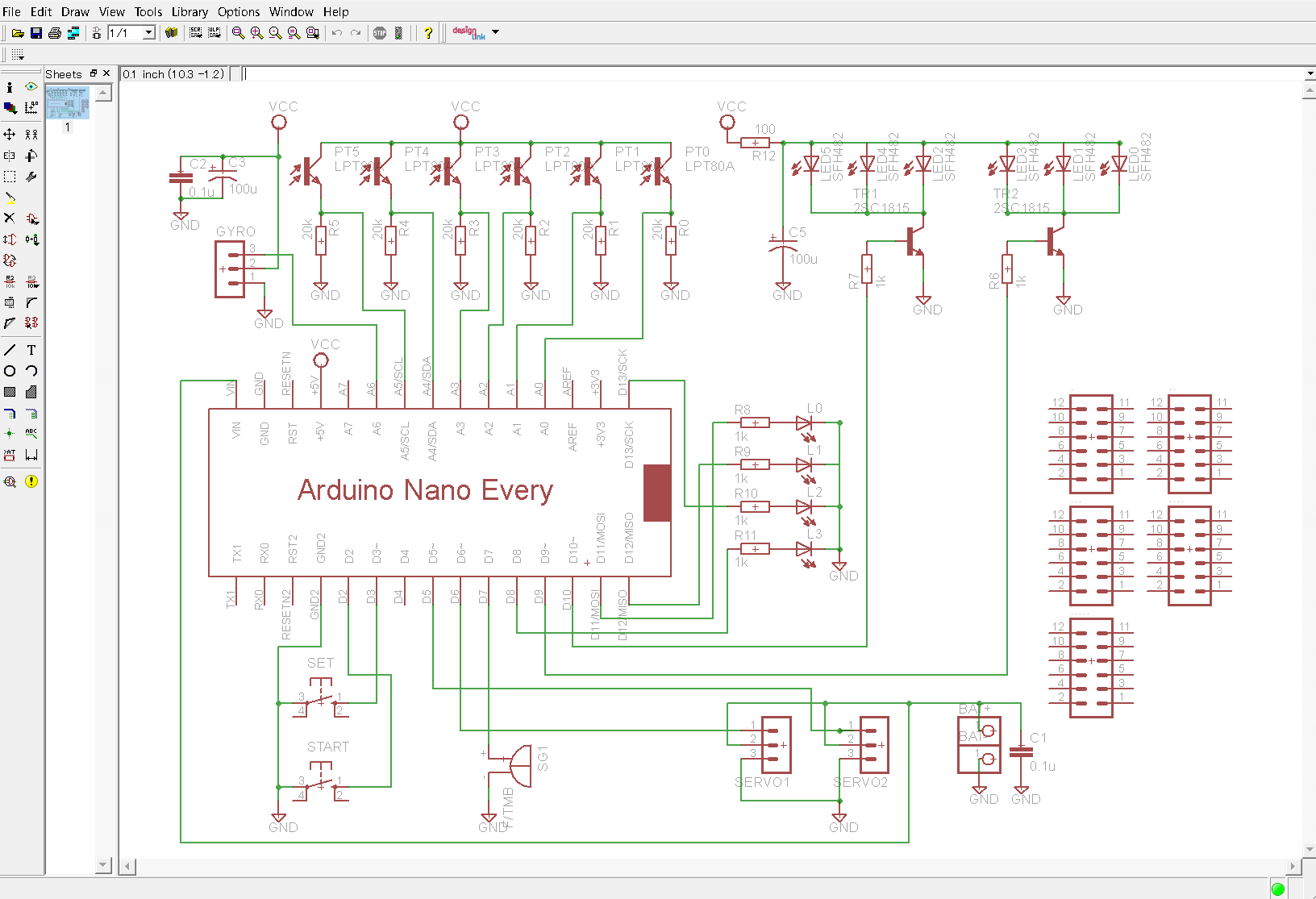
Eagleで回路設計。今はサブスクですが、何年も前に購入したものでまだ使えてます。
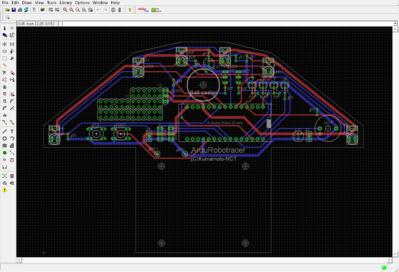
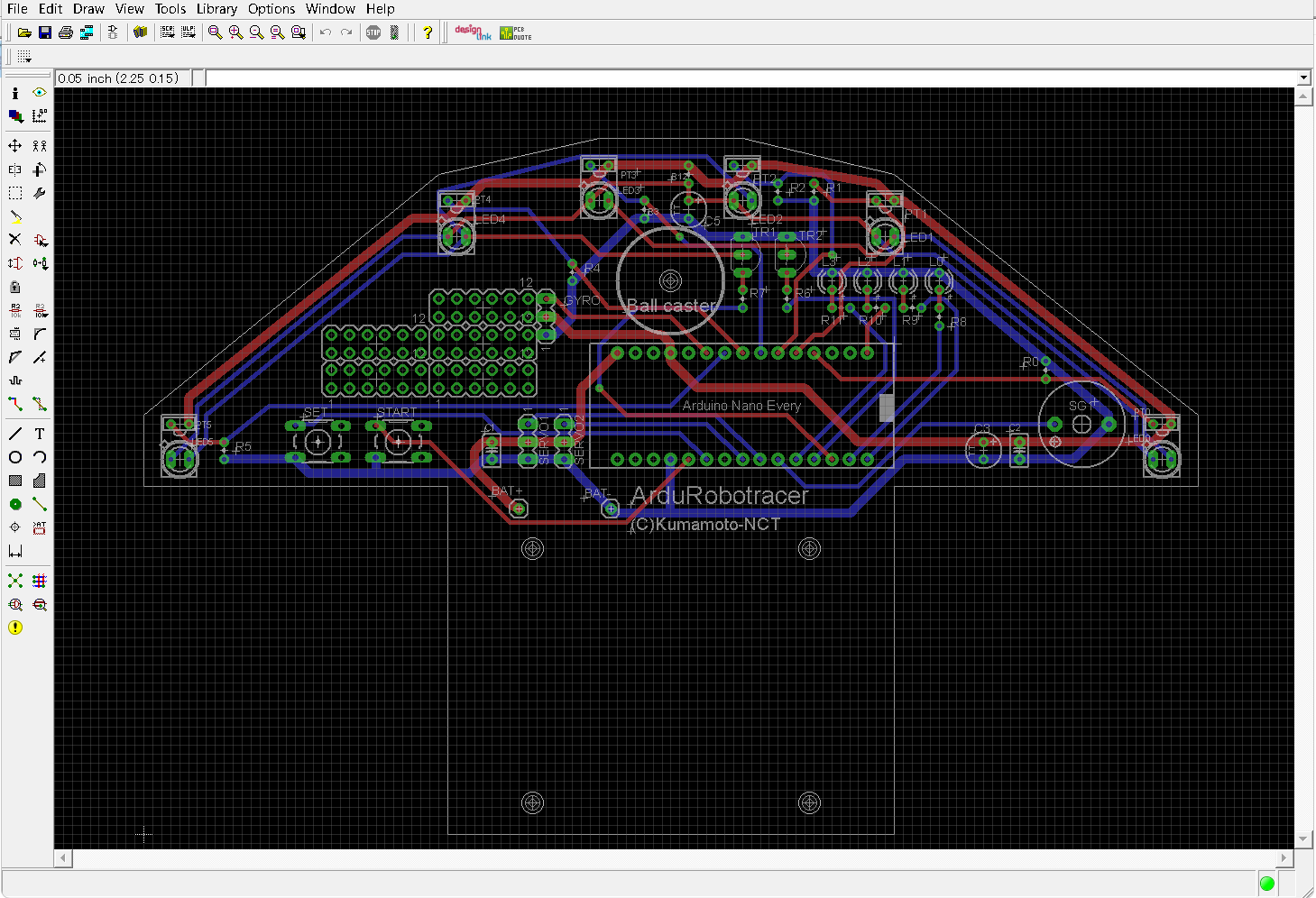
基板のパターンはこんな感じです。
配線は割とスカスカ。
電源ラインを太く引いて、電流が流れるところはなるべくスルーホールを使わない。
スルーホールはデジタル信号のみ。
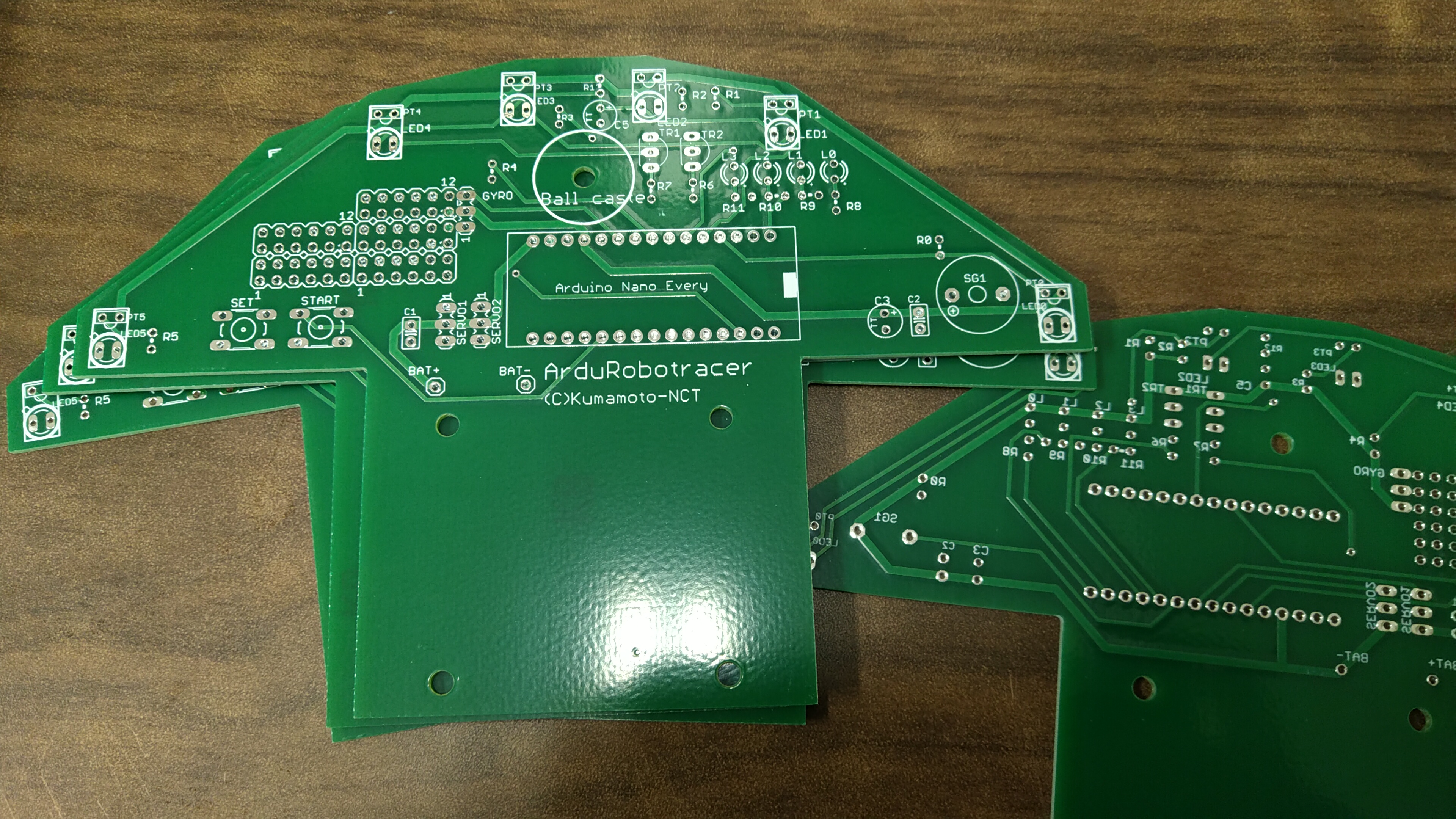
ということで、設計したものを発注。ユニバーサル基板で試作せずに発注したのと、1台作って相談元の相手方と議論できればいいので最低限の5枚で発注。
2週間くらいで届きました。
基板の色は黒にしとけばよかった、失敗。
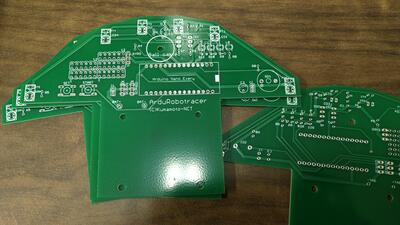
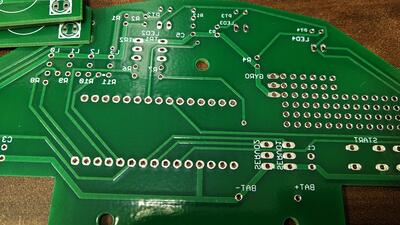
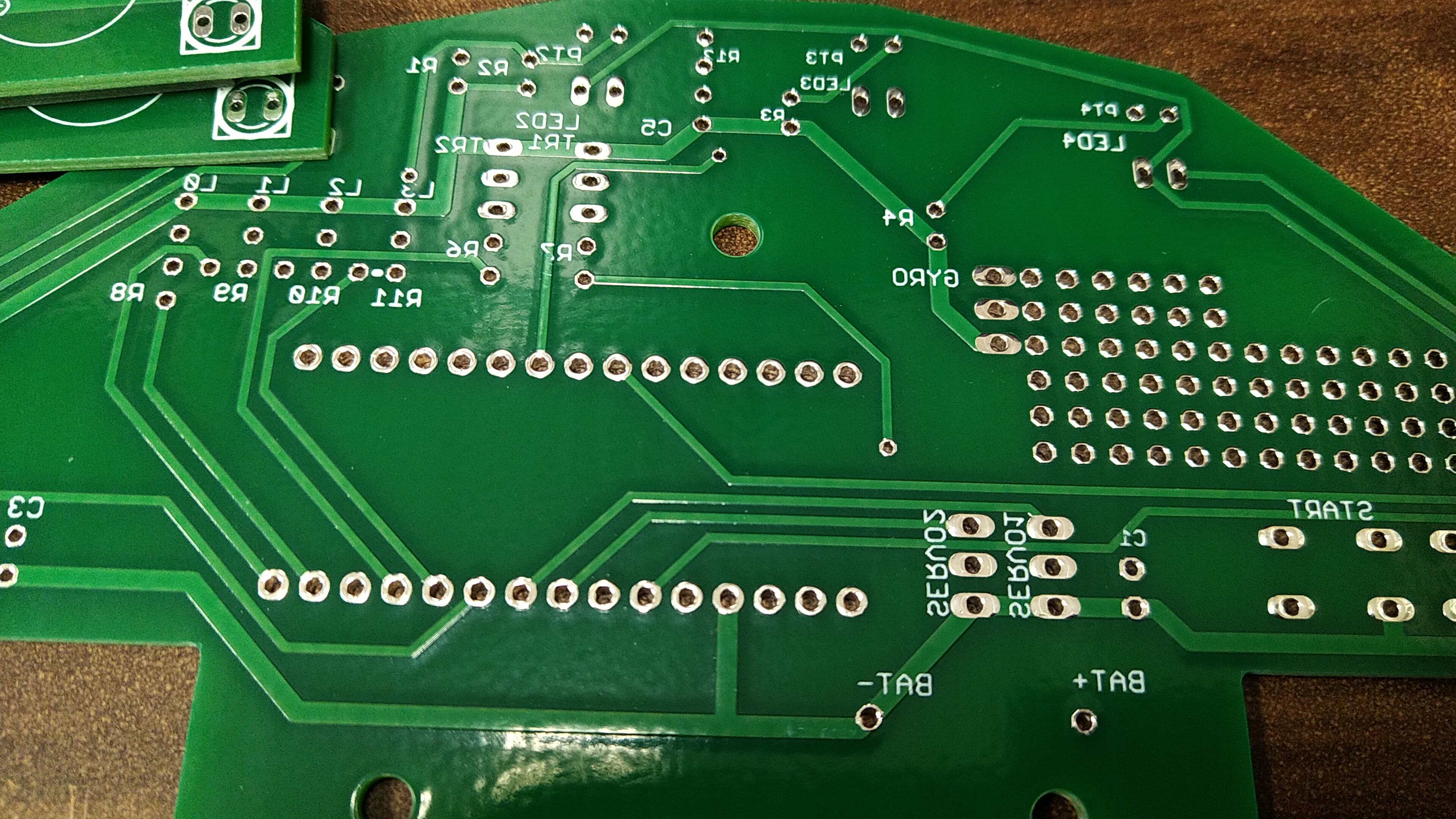
裏返すとさらに失敗あり、シルクが反転してます。パターン出力時のチェック入れ忘れ。
まあ、動作には関係ないのでよしです。
--追記--
基板は黒が良かったと書きましたが、製作してみたところ、緑でも特に反射の悪影響は見られませんでした。
基板のパターンはこんな感じです。
配線は割とスカスカ。
電源ラインを太く引いて、電流が流れるところはなるべくスルーホールを使わない。
スルーホールはデジタル信号のみ。
ということで、設計したものを発注。ユニバーサル基板で試作せずに発注したのと、1台作って相談元の相手方と議論できればいいので最低限の5枚で発注。
2週間くらいで届きました。
基板の色は黒にしとけばよかった、失敗。
裏返すとさらに失敗あり、シルクが反転してます。パターン出力時のチェック入れ忘れ。
まあ、動作には関係ないのでよしです。
--追記--
基板は黒が良かったと書きましたが、製作してみたところ、緑でも特に反射の悪影響は見られませんでした。



Arduino Nano Everyを使ったロボトレーサ(ライントレースロボット)の製作 その2
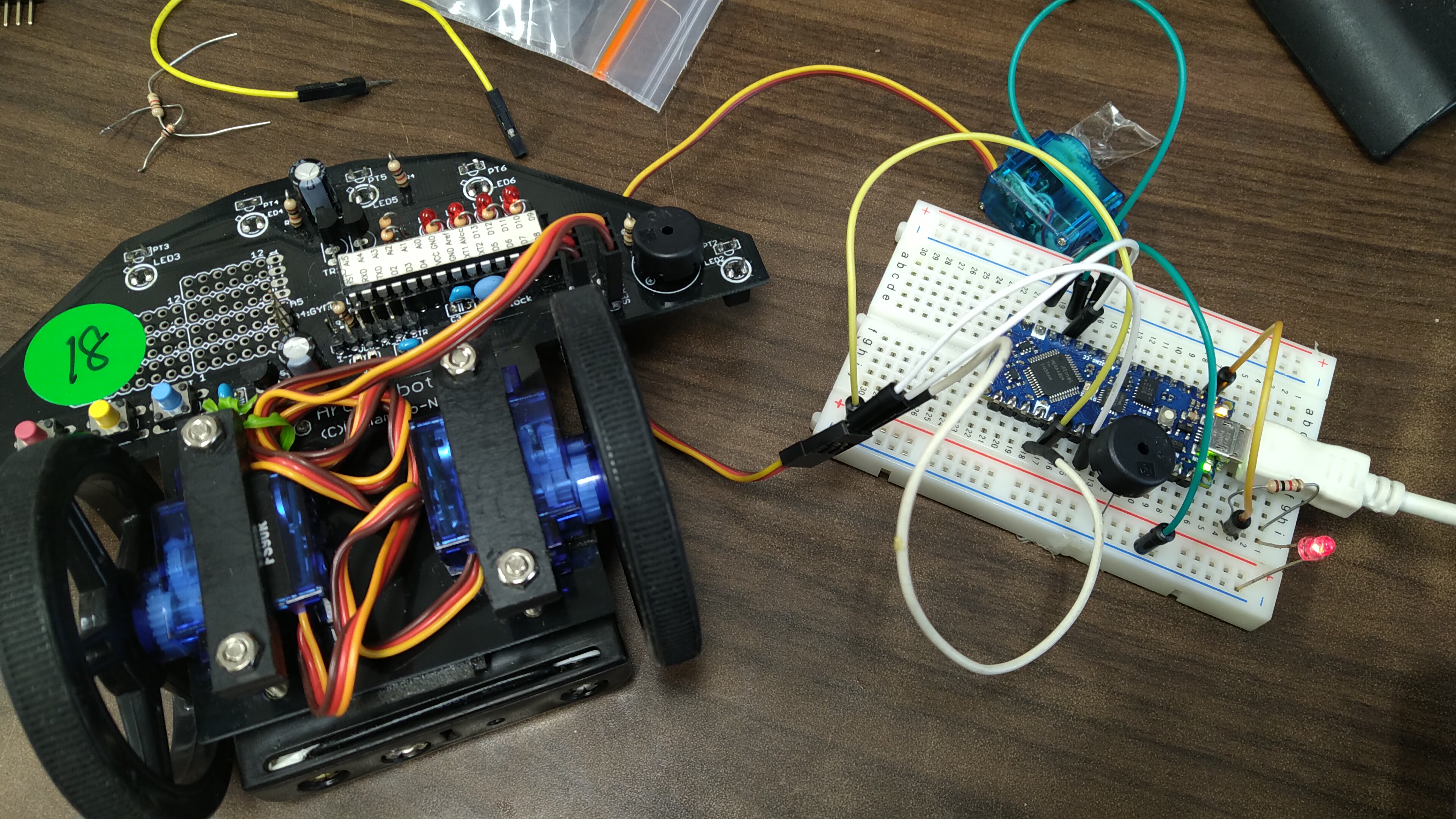
話が前後しましたが、Arduino Nano Everyで予備実験。
Atmega328Pで設計したArduinoロボトレーサと見比べながら、必要な機能をテスト。
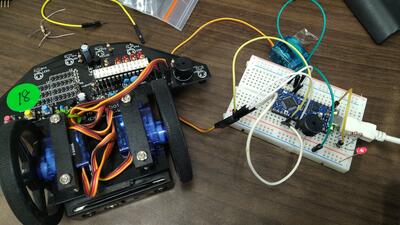
こんな感じで、ポートを確認しながら、ひとつずつ。
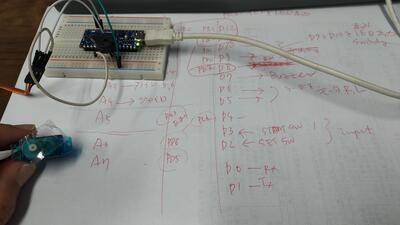
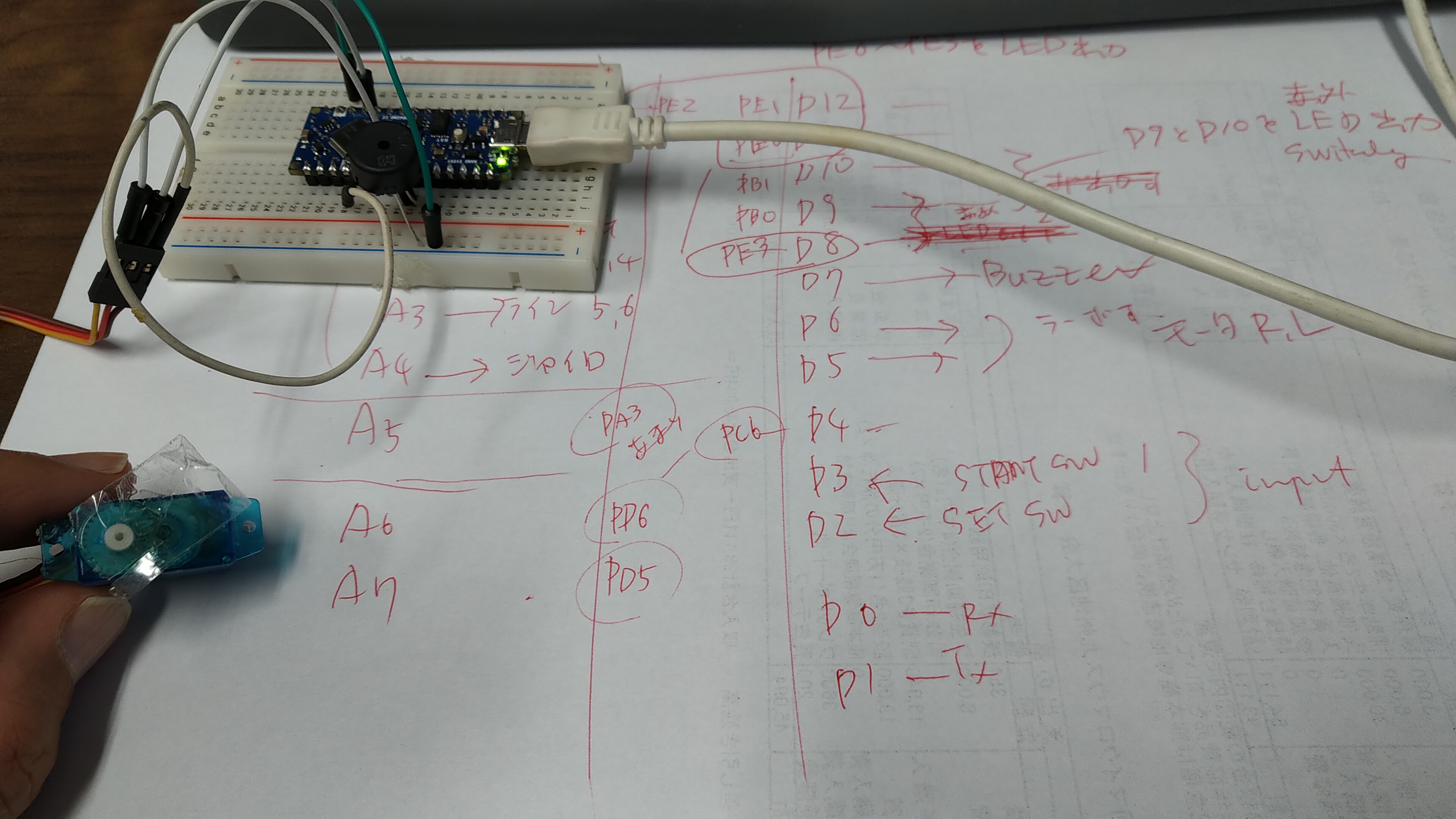
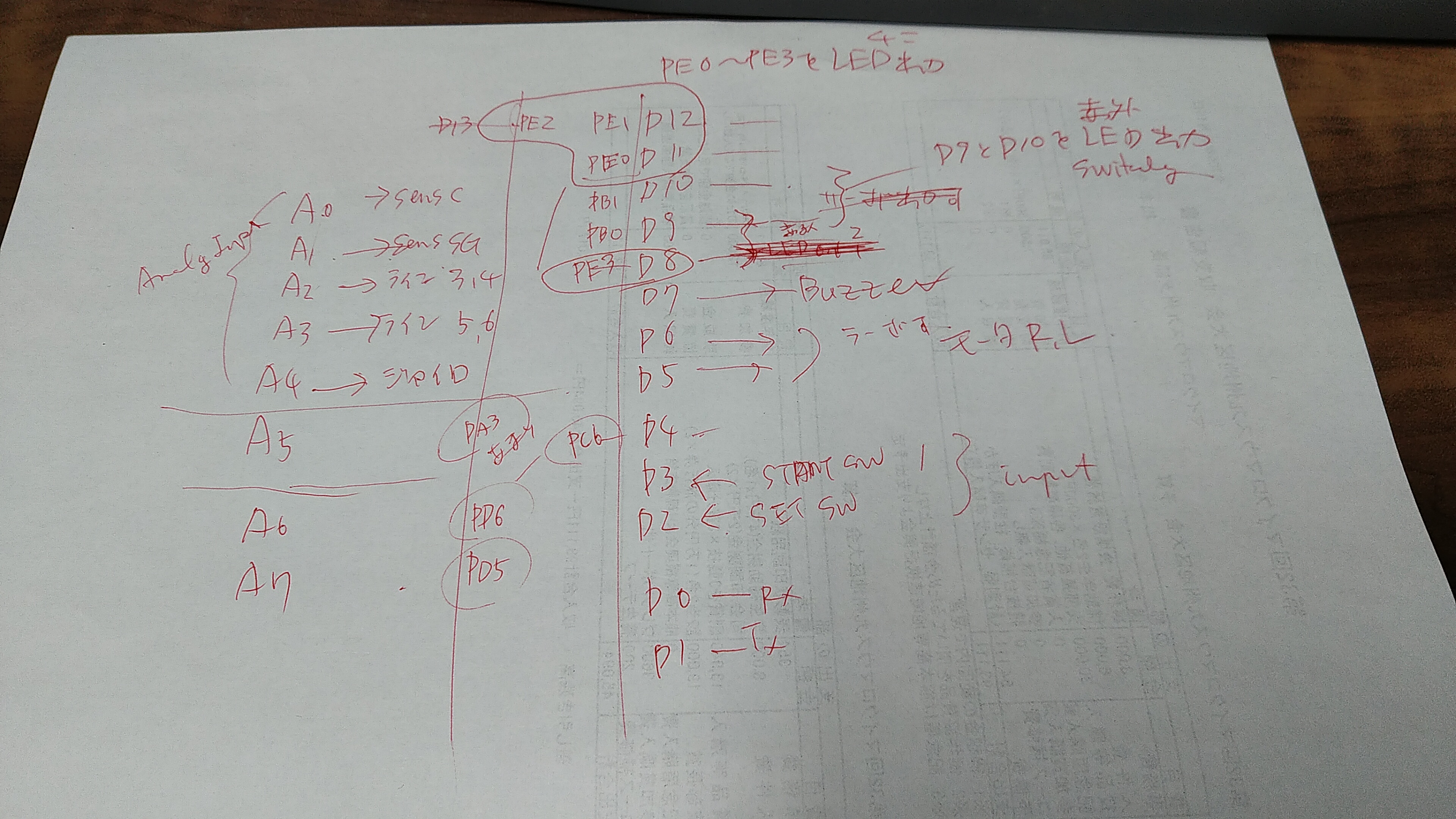
最終的にはこんな感じで、使えそうなポートを調べました。

デジタル入力でスイッチ2個。
D3: start sw
D4: set sw
D5,D6:PWMでサーボ出力を2個分。
D7:Tone関数でブザーによる音声出力
D9,D10: 赤外LED点灯のトランジスタスイッチング
D8,11,12,13:これらが、PEレジスタ下位4ビットなのでモード表示用LEDに使用
A0-A5:ラインとマーカー用センサ入力
A6:ジャイロセンサ用入力
アナログ入力の振り方は、パターンを引きながら考える。
これらのポートが同時に使えそうなことを一応確認。
広告→ ブランド: RT(アールティ) トレーニングトレーサー

Arduino Nano Every A Hands-On Guide【電子書籍】[ Agus Kurniawan ]
Atmega328Pで設計したArduinoロボトレーサと見比べながら、必要な機能をテスト。
こんな感じで、ポートを確認しながら、ひとつずつ。
最終的にはこんな感じで、使えそうなポートを調べました。
デジタル入力でスイッチ2個。
D3: start sw
D4: set sw
D5,D6:PWMでサーボ出力を2個分。
D7:Tone関数でブザーによる音声出力
D9,D10: 赤外LED点灯のトランジスタスイッチング
D8,11,12,13:これらが、PEレジスタ下位4ビットなのでモード表示用LEDに使用
A0-A5:ラインとマーカー用センサ入力
A6:ジャイロセンサ用入力
アナログ入力の振り方は、パターンを引きながら考える。
これらのポートが同時に使えそうなことを一応確認。
広告→ ブランド: RT(アールティ) トレーニングトレーサー
Arduino Nano Every A Hands-On Guide【電子書籍】[ Agus Kurniawan ]
Arduino Nano Everyを使ったロボトレーサ(ライントレースロボット)の製作 その1
相談を受けて設計したArduino Nano Everyを使ったロボトレーサキット。
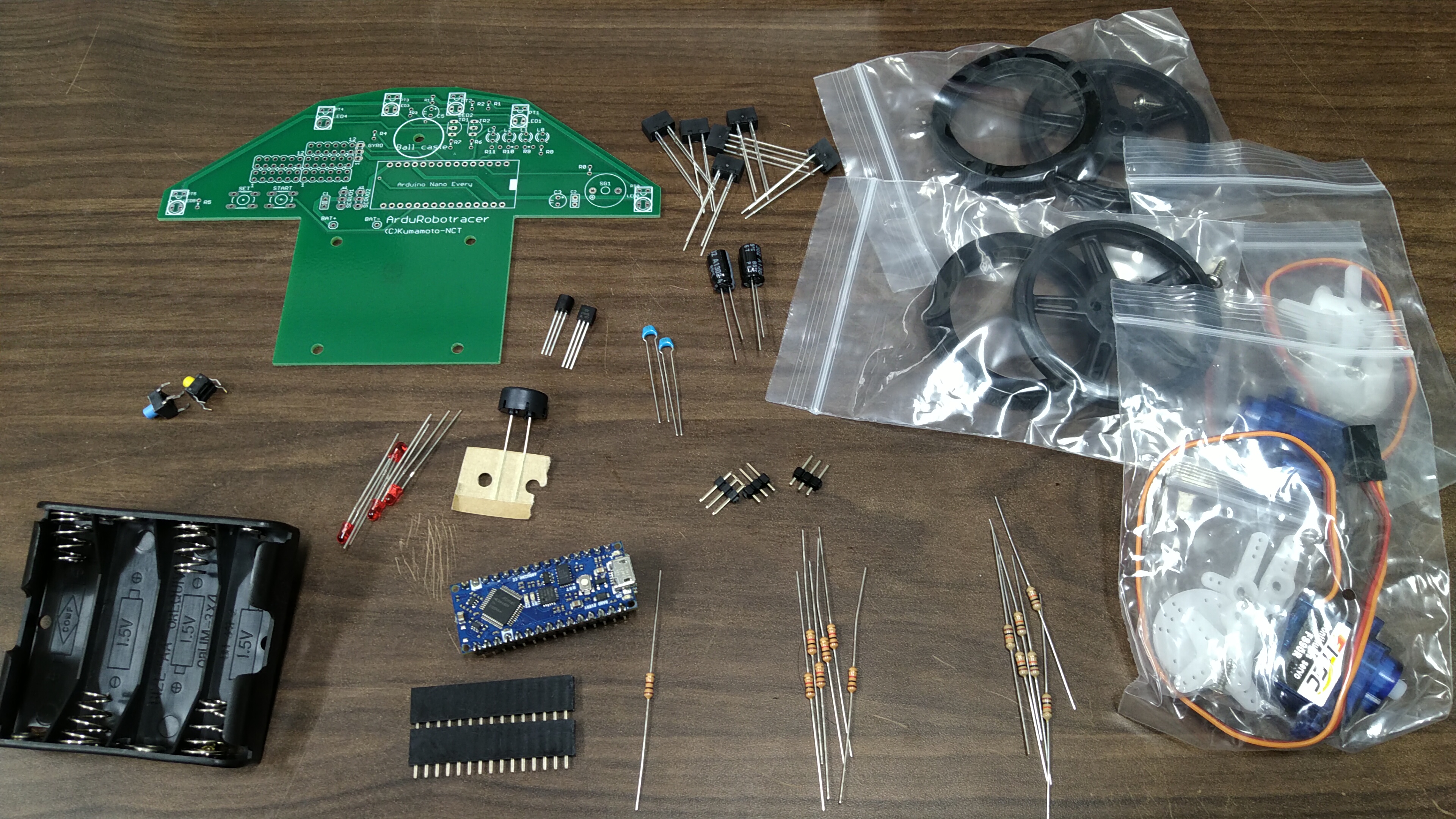
部品を集めてやっと製作を始めました。
部品がだいたい揃ったところ。

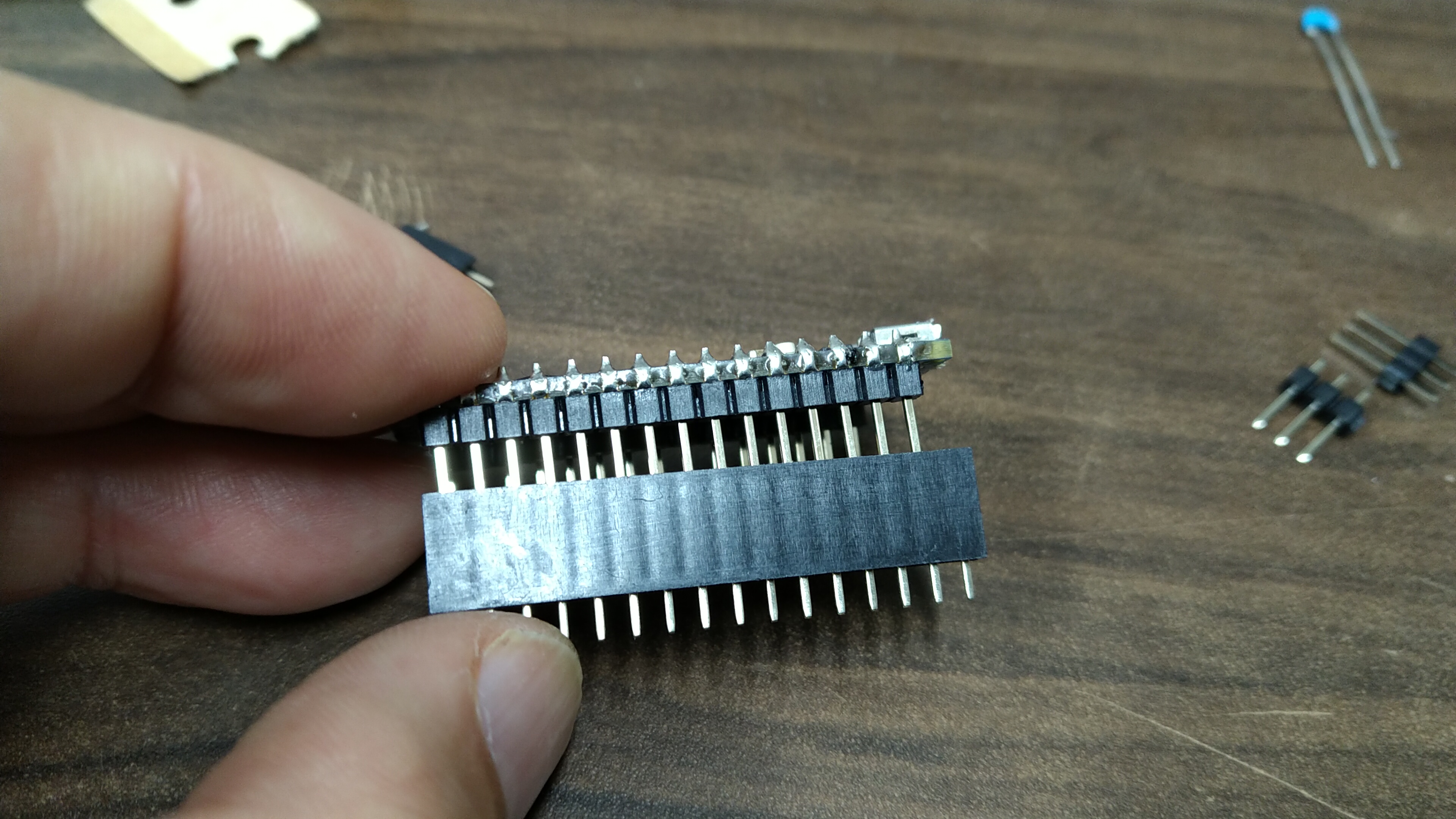
在庫のピンソケットはピンの数が合いませんでした...
Arduino Nano Everyは片側15ピンで計30ピン。
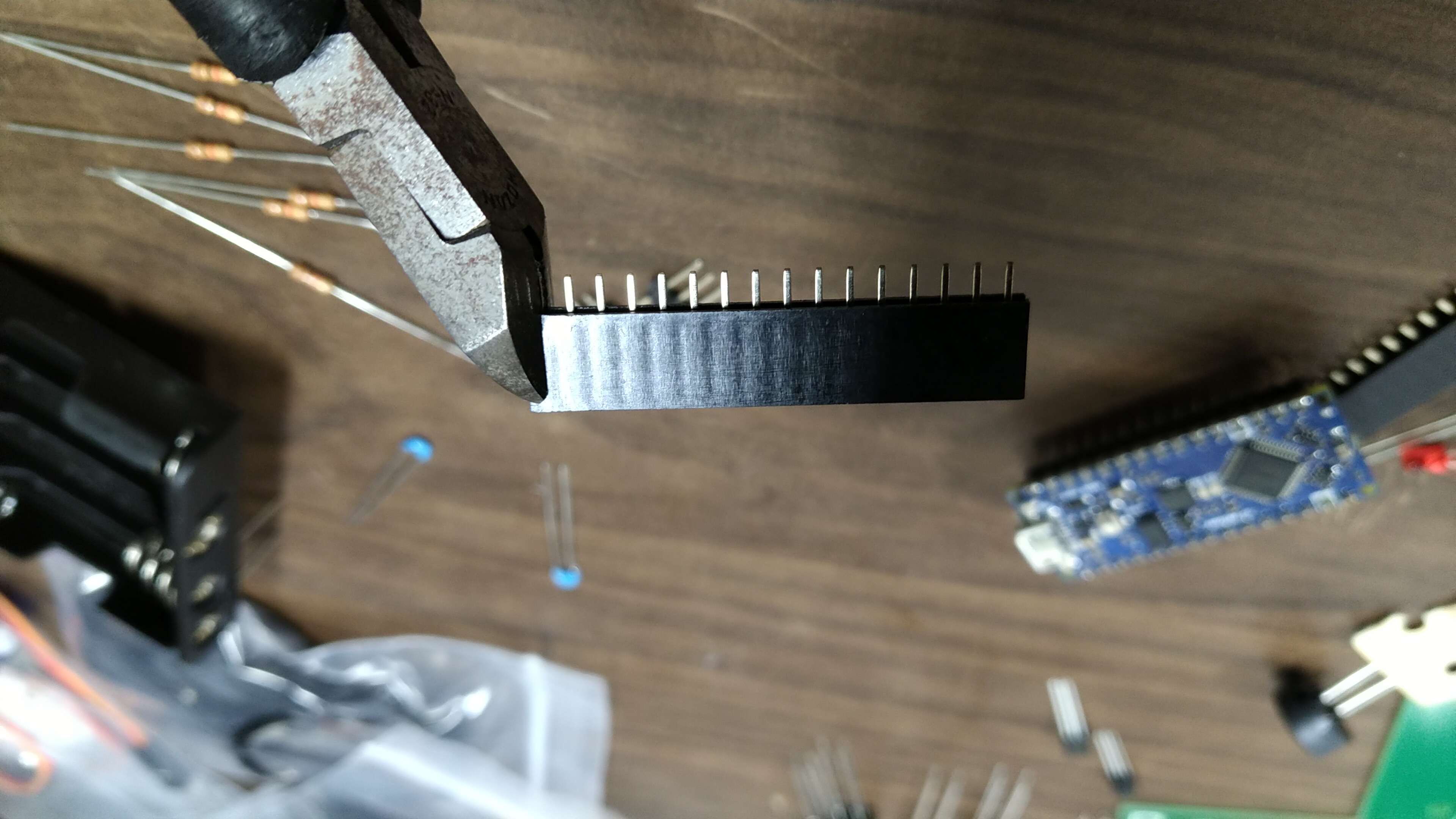
在庫のピンソケットは16ピン。

まあでも、簡単にカットできます。ニッパーでえいやっと。
そのあとやすりでもかけるときれいになりますが、あんまり気にせずそのまま使います。

とりあえず、今日は部品を揃えたところまで。
広告→ ブランド: RT(アールティ) トレーニングトレーサー

Arduino Arduino Nano Every(ピンヘッダ未実装)【ABX00028-R】[アルディーノ ナノ エブリー 夏休み 自由研究 自由工作 電子工作 小学生 中学生 高校生]
部品を集めてやっと製作を始めました。
部品がだいたい揃ったところ。
在庫のピンソケットはピンの数が合いませんでした...
Arduino Nano Everyは片側15ピンで計30ピン。
在庫のピンソケットは16ピン。
まあでも、簡単にカットできます。ニッパーでえいやっと。
そのあとやすりでもかけるときれいになりますが、あんまり気にせずそのまま使います。
とりあえず、今日は部品を揃えたところまで。
広告→ ブランド: RT(アールティ) トレーニングトレーサー
Arduino Arduino Nano Every(ピンヘッダ未実装)【ABX00028-R】[アルディーノ ナノ エブリー 夏休み 自由研究 自由工作 電子工作 小学生 中学生 高校生]
水中スラスターを注文
最近、TEMUから広告がたくさん入って目に付くので、TEMUから水中スラスターを注文しました。
amazonよりちょい安いです。ちゃんと届くかなぁ?
amazonよりちょい安いです。ちゃんと届くかなぁ?

