水中ドローンの製作、その4
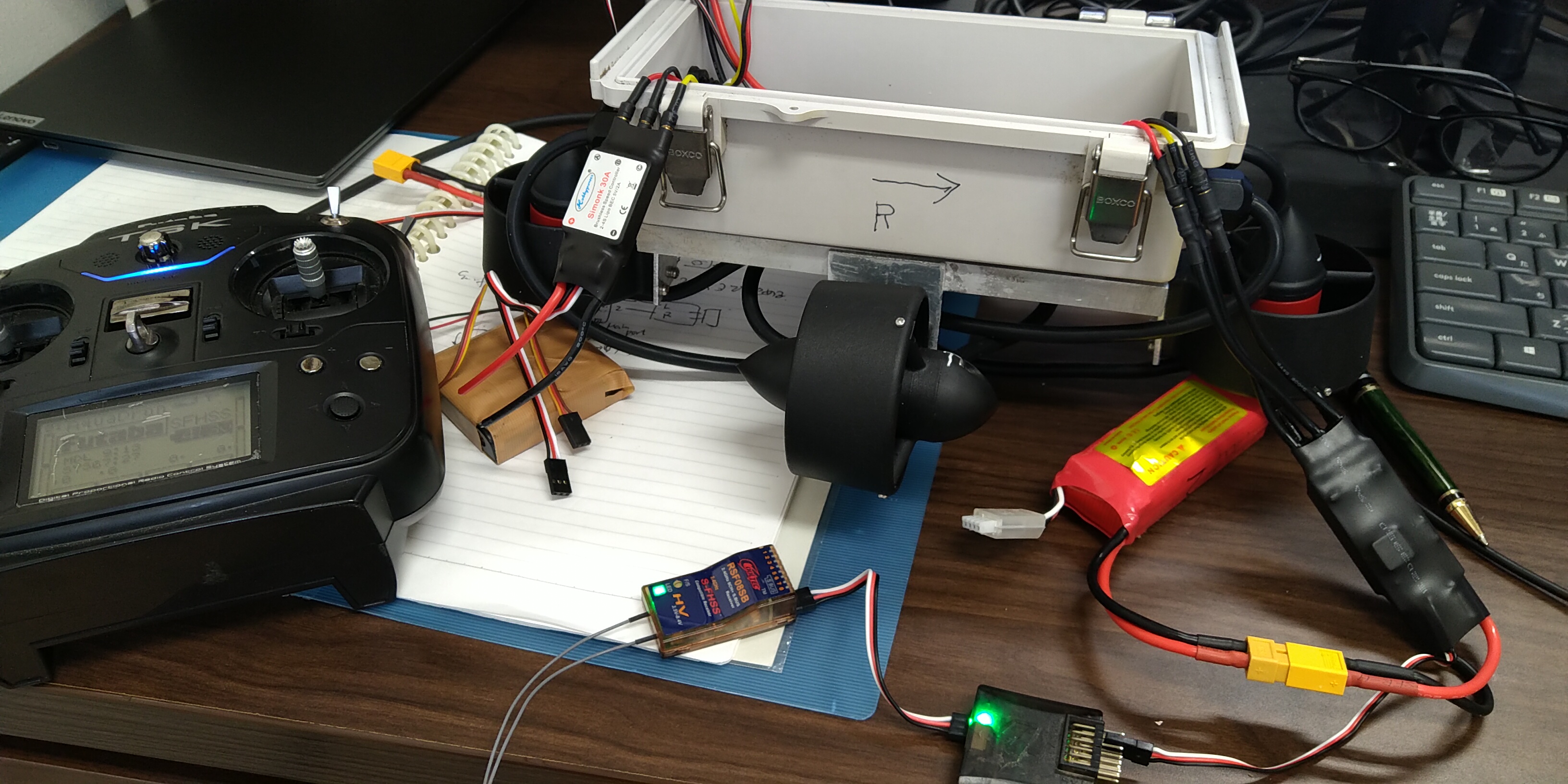
メカ積み中。
送信機と受信機をペアリング。
受信機からはSBUSで信号を受け取り、フライトコントローラに接続。ここで使ったのはCC3D。
カスタム設定がやりやすいのでとりあえずラジコンで操縦方法を考えたりするのには便利。
考え方としては、
船体は基本的に浮く状態。
前後のスラスターで下方向に推力を得て沈降。ESCは沈下方向のみ。
この時に前後のピッチが水平になるようにCC3Dで制御。
左右のスラスター双方向のESCを使い、モード1の送信機の右スティックの前後左右に割り当てて、前進後退左右旋回ができるようにした。
バッテリーはリポ3セルでまあ十分。電圧よりも容量で浮力を調整してできるだけ大容量を積みたい。

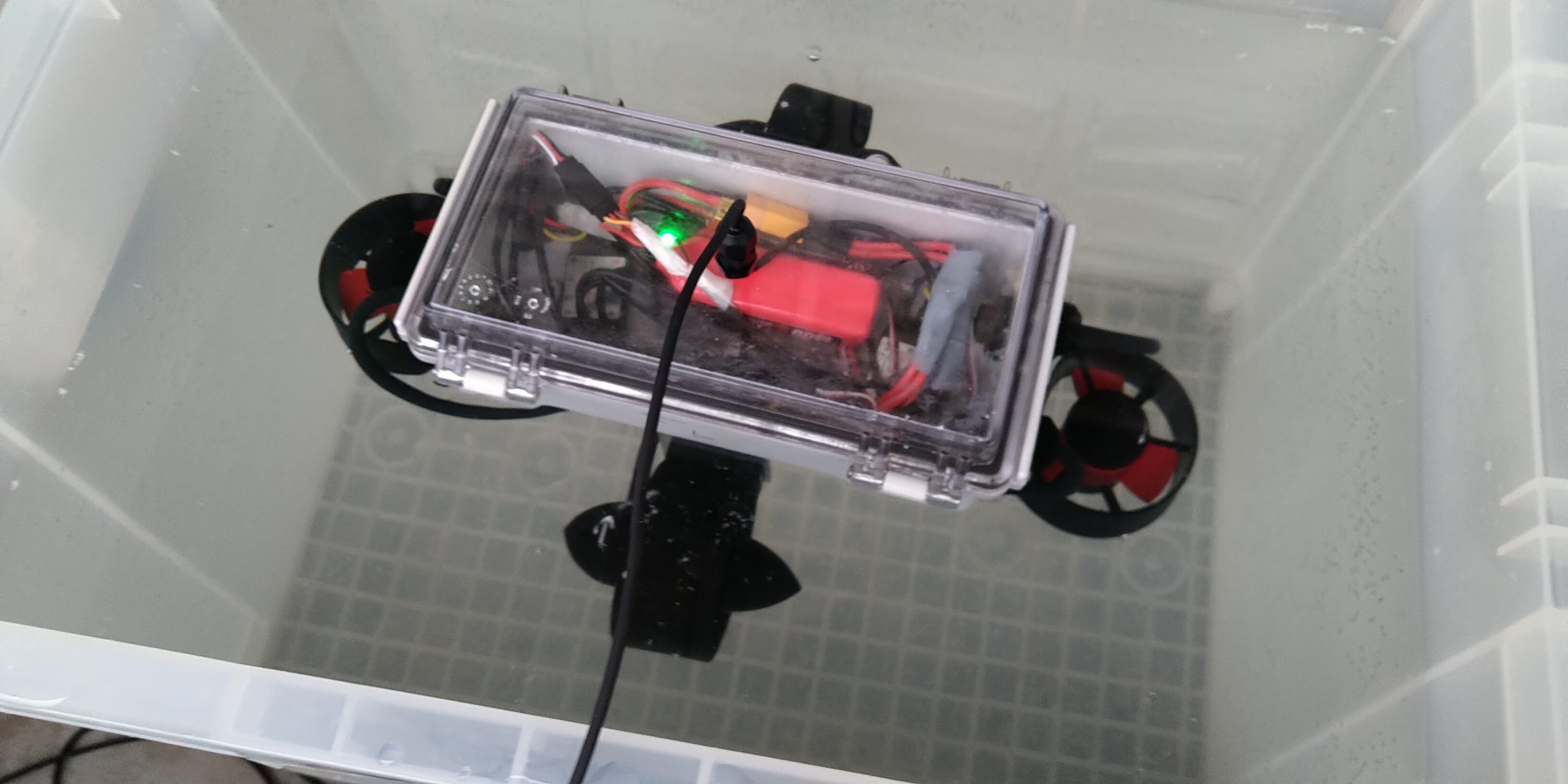
ケース上部に穴を開けて、ケーブルグラントでケーブルを通す。このケーブルは現時点では、受信機を船外に出すため。バッテリーも中。

実験用の水の入った容器に浮かべたところ。ほぼ水平に浮いてる。

ここで前後スラスターを回すと沈降。結構水流はげしい。
前後、左右旋回も試して、問題なく操舵可能。

横から見たところ、スラスターの推力で沈んで一番下についてるところ。

その時の動画はこちら。
送信機と受信機をペアリング。
受信機からはSBUSで信号を受け取り、フライトコントローラに接続。ここで使ったのはCC3D。
カスタム設定がやりやすいのでとりあえずラジコンで操縦方法を考えたりするのには便利。
考え方としては、
船体は基本的に浮く状態。
前後のスラスターで下方向に推力を得て沈降。ESCは沈下方向のみ。
この時に前後のピッチが水平になるようにCC3Dで制御。
左右のスラスター双方向のESCを使い、モード1の送信機の右スティックの前後左右に割り当てて、前進後退左右旋回ができるようにした。
バッテリーはリポ3セルでまあ十分。電圧よりも容量で浮力を調整してできるだけ大容量を積みたい。
ケース上部に穴を開けて、ケーブルグラントでケーブルを通す。このケーブルは現時点では、受信機を船外に出すため。バッテリーも中。

実験用の水の入った容器に浮かべたところ。ほぼ水平に浮いてる。
ここで前後スラスターを回すと沈降。結構水流はげしい。
前後、左右旋回も試して、問題なく操舵可能。

横から見たところ、スラスターの推力で沈んで一番下についてるところ。

その時の動画はこちら。


水中ドローンの製作、その3
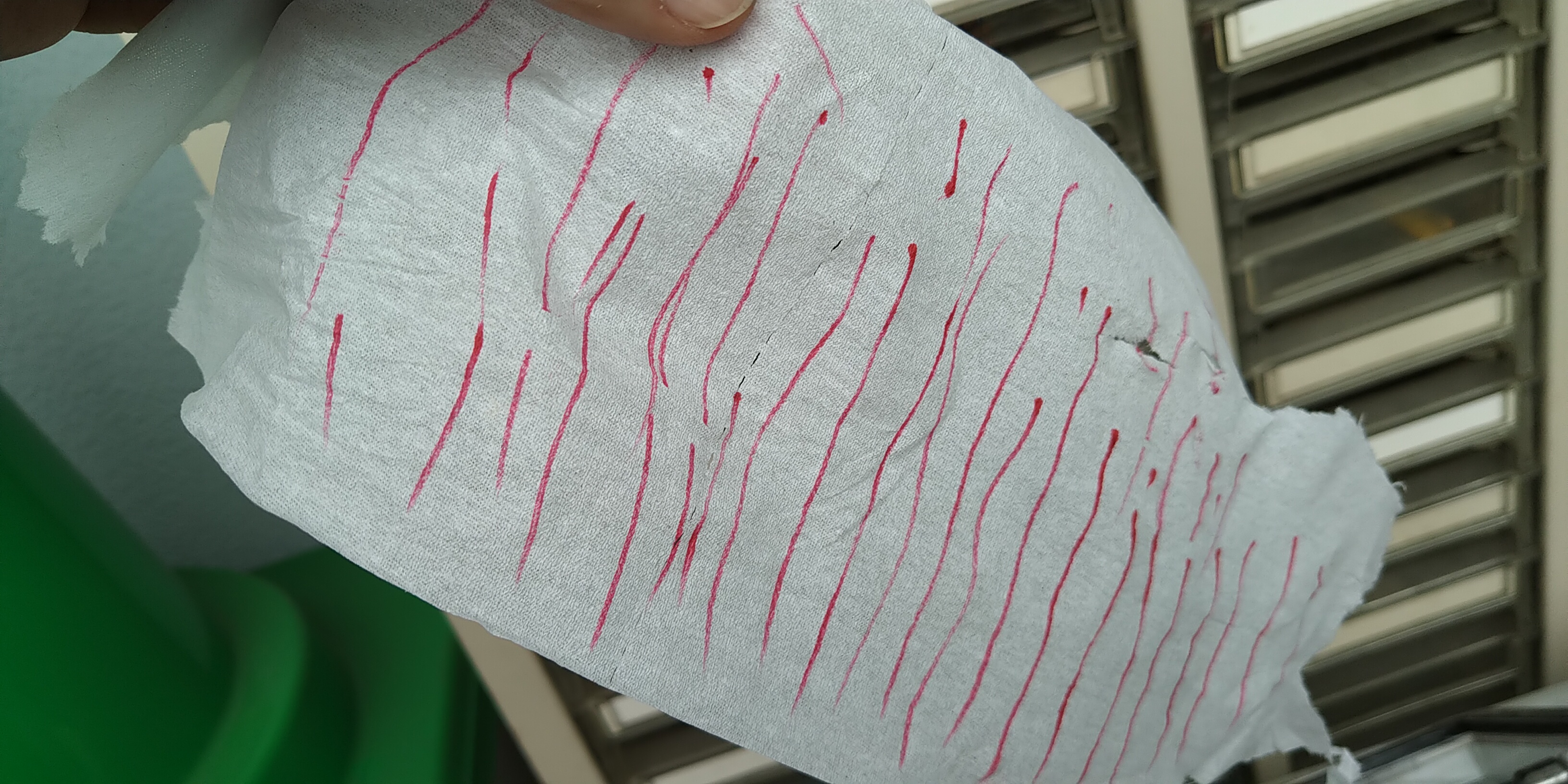
漏水を調べるちょっとした工夫。
ケースにケーブルが入ってるわけですが、

トイレットペーパーに水性ペンで適当に落書き。

これをちぎって配線の周りに置いてから、水没させます。

水漏れがあると、インクが滲んでどこが漏れてるかがすぐにわかります。

ケースにケーブルが入ってるわけですが、

トイレットペーパーに水性ペンで適当に落書き。
これをちぎって配線の周りに置いてから、水没させます。

水漏れがあると、インクが滲んでどこが漏れてるかがすぐにわかります。
水中ドローンの製作、その2
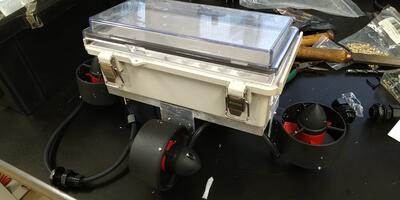
先に組んだフレームとスラスターは、タカチの防水ケースに取り付け。
重い物を下、ケースが上に浮いて姿勢の上下を保つように考えました。
前後の重量差が出やすいと思ったのでピッチを調整できるように前後に独立に下方向に推力を出すスラスターを配置、左右は操舵用という考えです。そもそもケースが浮くようになってるので左右の大きな傾きはでないだろうと考えました。
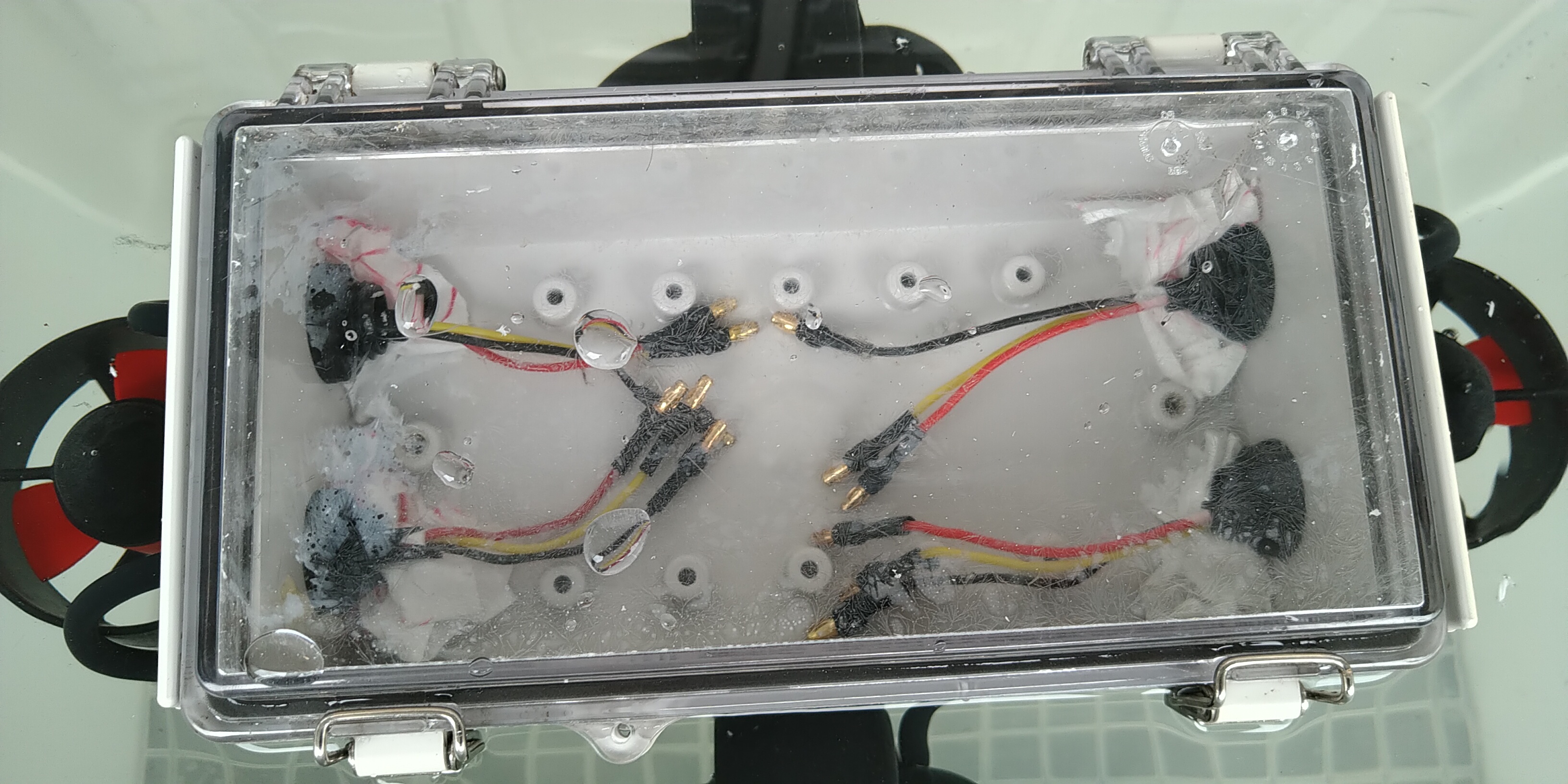
ケースに穴を開けてモーターの配線を通します。ここで防水が大事。ミスミからケーブルグラントを購入。ぎゅっと締め付けて防水します。
でも、進水試験したら水漏れしました。ケースに開けた穴がいびつでOリングが不均等に絞めつけられて隙間から水が入ってました。
そこで、別に購入したOリングのセットから同じ径の太いものに交換し、シリコングリースを塗って締め付けたら、漏水が止まりました。

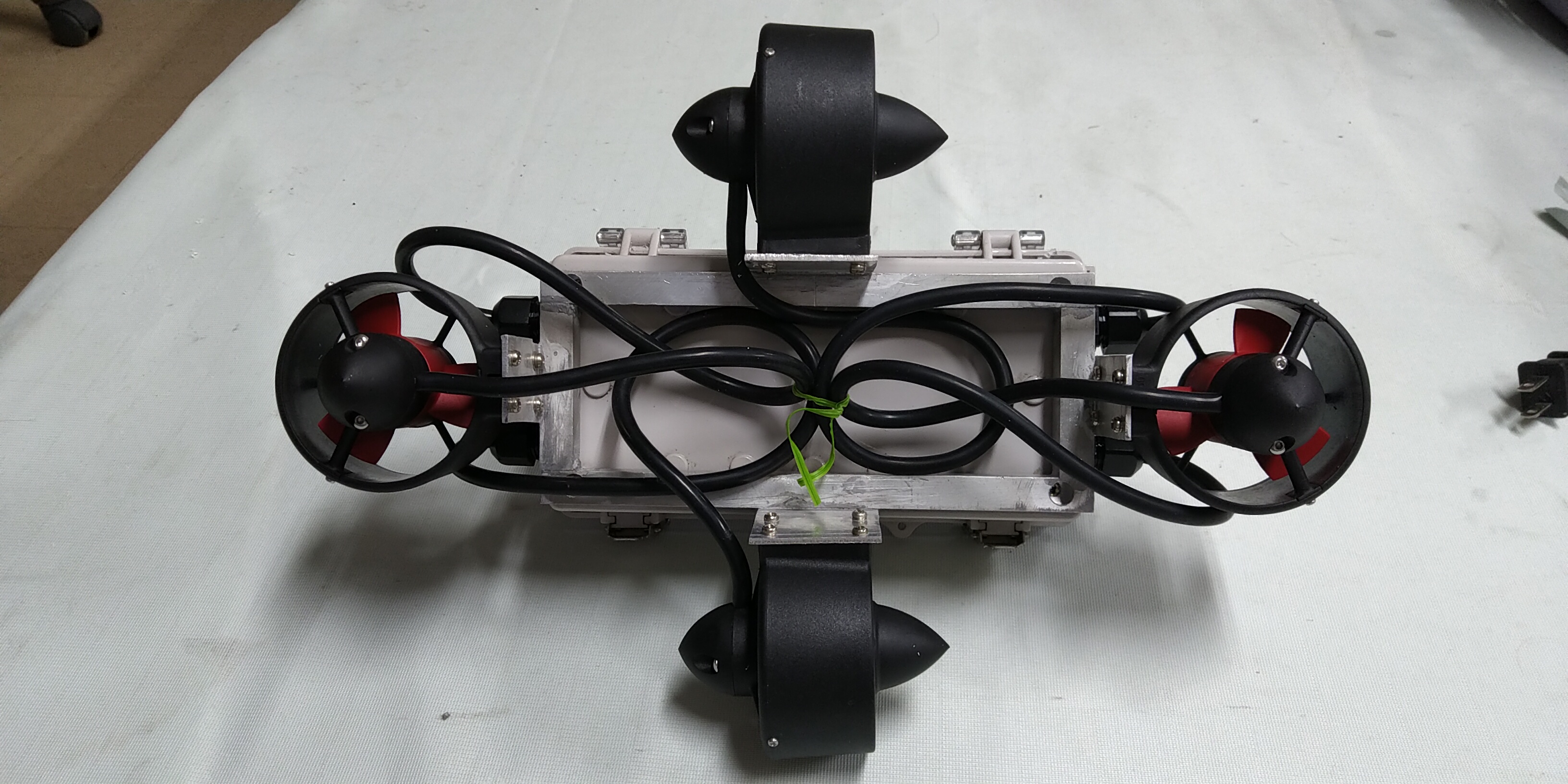
ケース内部に余裕がなかったので、裏面でケーブルを渡してまとめ。

重い物を下、ケースが上に浮いて姿勢の上下を保つように考えました。
前後の重量差が出やすいと思ったのでピッチを調整できるように前後に独立に下方向に推力を出すスラスターを配置、左右は操舵用という考えです。そもそもケースが浮くようになってるので左右の大きな傾きはでないだろうと考えました。
ケースに穴を開けてモーターの配線を通します。ここで防水が大事。ミスミからケーブルグラントを購入。ぎゅっと締め付けて防水します。
でも、進水試験したら水漏れしました。ケースに開けた穴がいびつでOリングが不均等に絞めつけられて隙間から水が入ってました。
そこで、別に購入したOリングのセットから同じ径の太いものに交換し、シリコングリースを塗って締め付けたら、漏水が止まりました。
ケース内部に余裕がなかったので、裏面でケーブルを渡してまとめ。
水中ドローンの製作、その1
共同研究の相手方からの要望から、水中ドローンを作ってみることにしました。
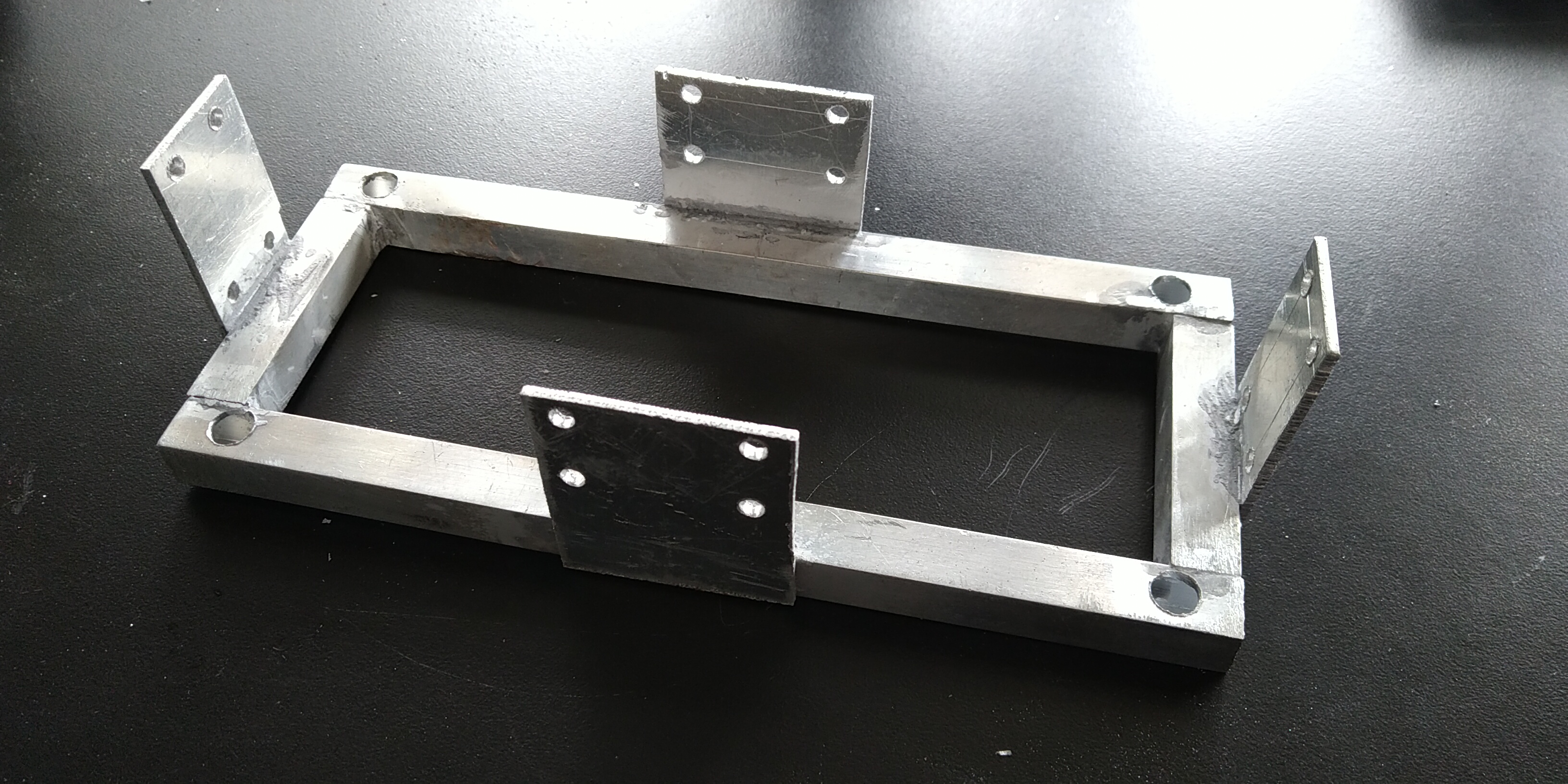
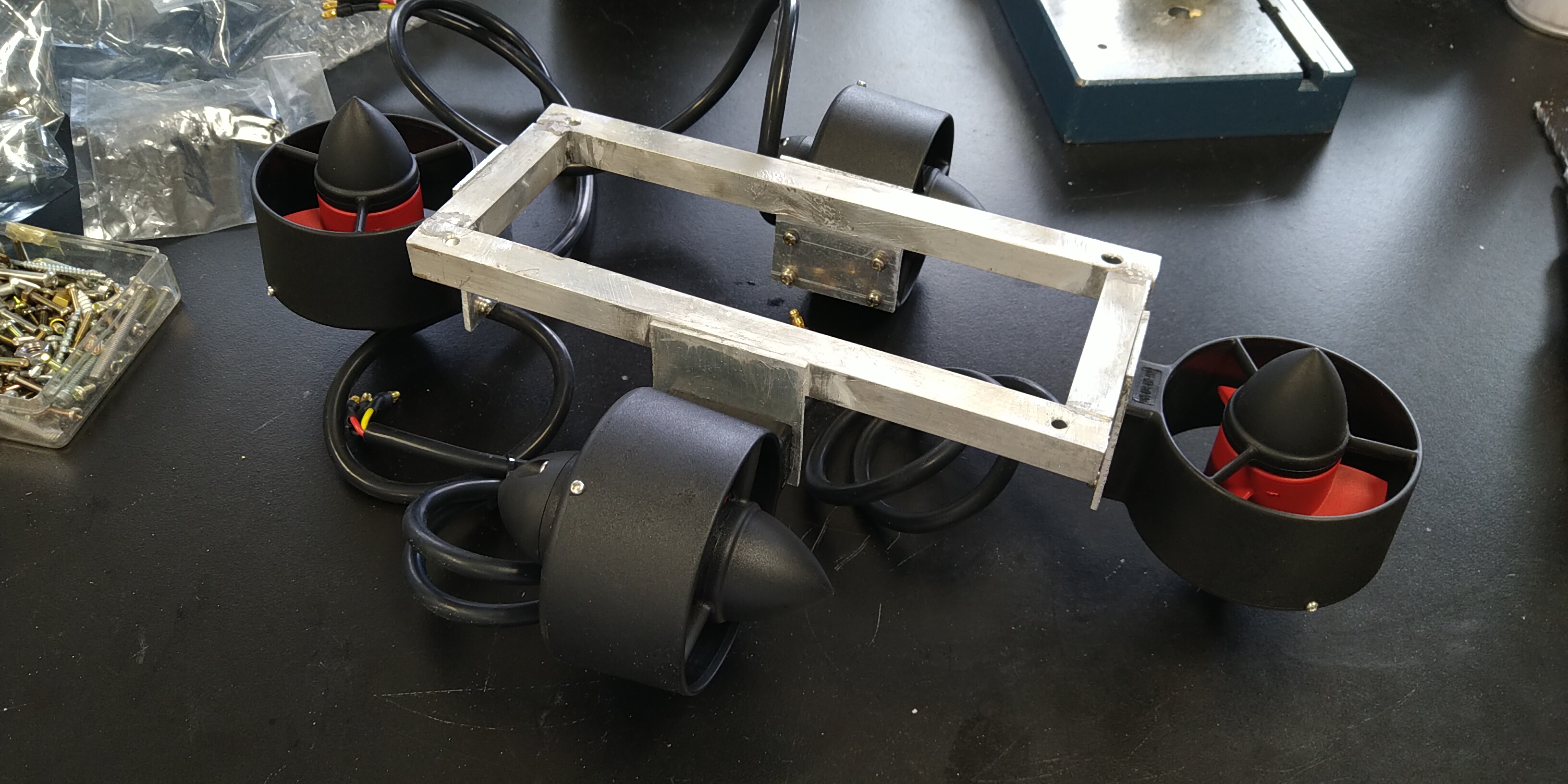
いろいろ考えたけどなるべく簡単な構造で早く作りたかったので、まず水中スラスターを取り付けるフレームを作成。
以前練習したアルミのロウ付けで作ってみるかと思って、アルミ角パイプを切断して長方形に組み合わせてロウ付け、そこにスラスター搭載用の穴を開けたアルミの板をロウ付け。
 何とか形ができました。作業途中で少しずれて平面は出てなくて数ミリたわんでますがまあ許容範囲。
何とか形ができました。作業途中で少しずれて平面は出てなくて数ミリたわんでますがまあ許容範囲。
想定外だったのが、スラスターを取り付けるアルミ板がロウ付けの際の熱で焼きなまされて柔らかくなってました、ちょっと力をかけると曲がりやすいです。
いろいろ考えたけどなるべく簡単な構造で早く作りたかったので、まず水中スラスターを取り付けるフレームを作成。
以前練習したアルミのロウ付けで作ってみるかと思って、アルミ角パイプを切断して長方形に組み合わせてロウ付け、そこにスラスター搭載用の穴を開けたアルミの板をロウ付け。
 何とか形ができました。作業途中で少しずれて平面は出てなくて数ミリたわんでますがまあ許容範囲。
何とか形ができました。作業途中で少しずれて平面は出てなくて数ミリたわんでますがまあ許容範囲。想定外だったのが、スラスターを取り付けるアルミ板がロウ付けの際の熱で焼きなまされて柔らかくなってました、ちょっと力をかけると曲がりやすいです。
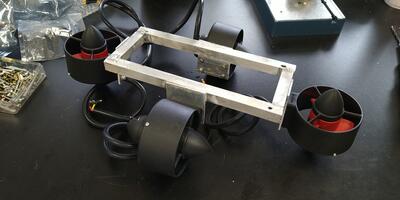
スラスターを取り付けたらこんな感じ。前後に下向きの推力を得るスラスター、左右に操舵用のスラスターを取り付け。
大容量のバッテリー購入
これまでは、空モノばっかり作ってて、ちょっと新しい構造の検証だけでよかったのでので容量はそこそこ。
こんどはボートなので、電圧も落として容量を大きめのバッテリーを探しました。
と言っても、業務用ではなく試作レベル、実験レベルなので1時間くらい動けばいいです。

こんどはボートなので、電圧も落として容量を大きめのバッテリーを探しました。
と言っても、業務用ではなく試作レベル、実験レベルなので1時間くらい動けばいいです。


