APM2.6のGPSアンテナを分解
APM2.6だったか購入したときについてきたGPSアンテナ。
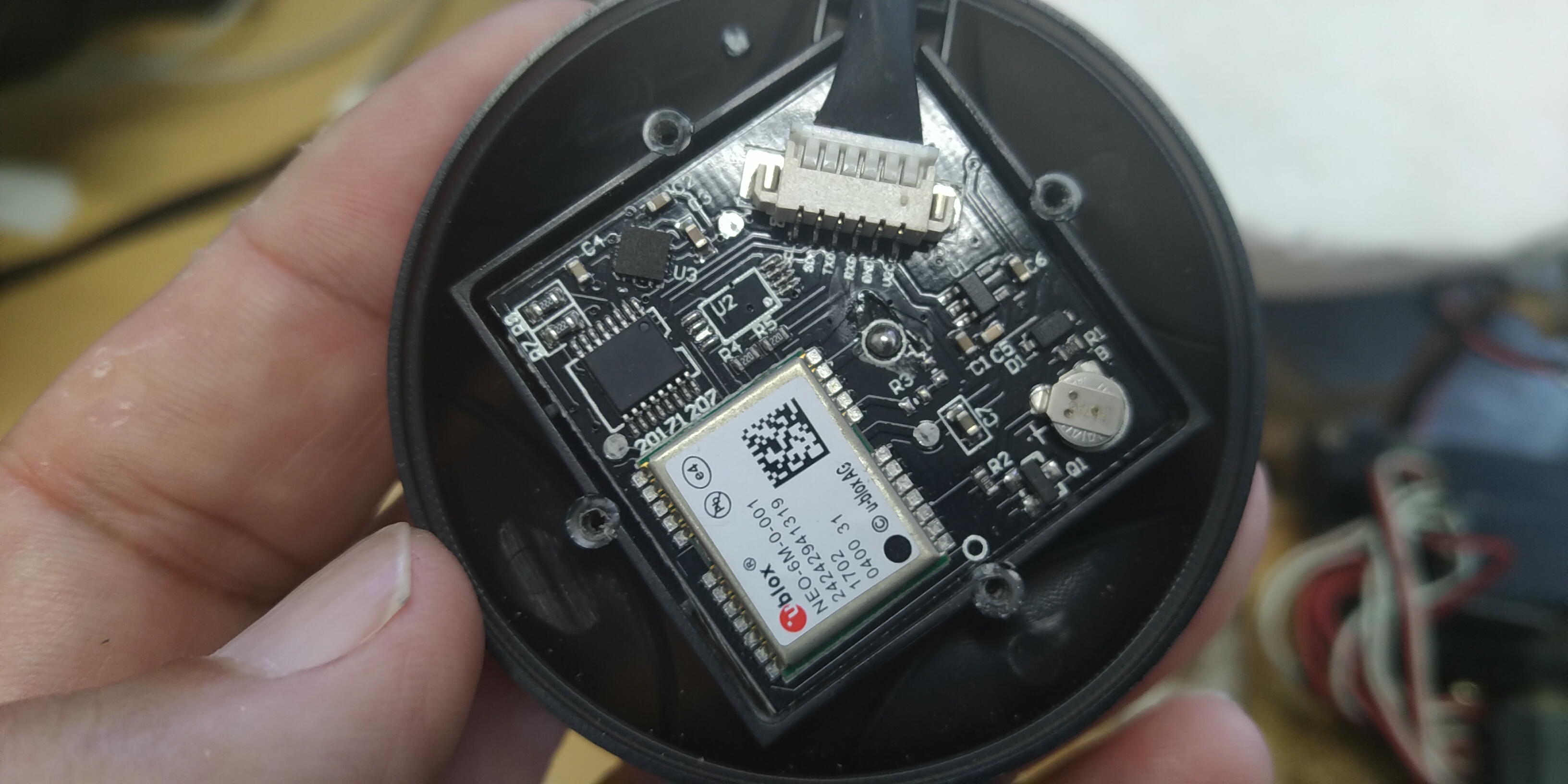
このバージョンは、アンテナの中にコンパスが入ってて、I2Cで接続できるのでコネクタが2つに分かれてます。

分解してみたらこんな感じで、基板に斜めについてるICが左上にあります。
これが多分コンパス。
取り外して別々に使いたい、と思って分解したのですが、どうやら無理っぽいですね。

このバージョンは、アンテナの中にコンパスが入ってて、I2Cで接続できるのでコネクタが2つに分かれてます。

分解してみたらこんな感じで、基板に斜めについてるICが左上にあります。
これが多分コンパス。
取り外して別々に使いたい、と思って分解したのですが、どうやら無理っぽいですね。


ケーブルカメラ付き自動航行ボートの暗視カメラ化
以前作ったケーブルカメラ付き自動航行ボートのカメラを共同研究先に提供したのですが、暗い所で写らないという話です。
スマホで見たら赤外線の感度は多少あったのでこれで良いかと思ってたのですが、別の暗視カメラと比べるとかなり暗いので、カメラ交換かなぁ?と思っていたのですが、もしかして上手くいけばと思いカメラを分解

するとやっぱり、赤外線フィルタがレンズ側に入っていました。
どこかにフィルタが入ってるだろうと思ったのですが、こんなに取り外しやすい所に張り付けてあるだけで超ラッキーです。

試しに、カメラの前に取り外したフィルタをかざすと、そこだけ丁度、四角く暗くなります。

結果、こんな感じに赤外線感度を持つカメラになりました。
色味が変りましたが可視光でも使えます。

スマホで見たら赤外線の感度は多少あったのでこれで良いかと思ってたのですが、別の暗視カメラと比べるとかなり暗いので、カメラ交換かなぁ?と思っていたのですが、もしかして上手くいけばと思いカメラを分解

するとやっぱり、赤外線フィルタがレンズ側に入っていました。
どこかにフィルタが入ってるだろうと思ったのですが、こんなに取り外しやすい所に張り付けてあるだけで超ラッキーです。

試しに、カメラの前に取り外したフィルタをかざすと、そこだけ丁度、四角く暗くなります。
結果、こんな感じに赤外線感度を持つカメラになりました。
色味が変りましたが可視光でも使えます。

偏向3スラスタ水中ドローンの動作録画用棒つけた
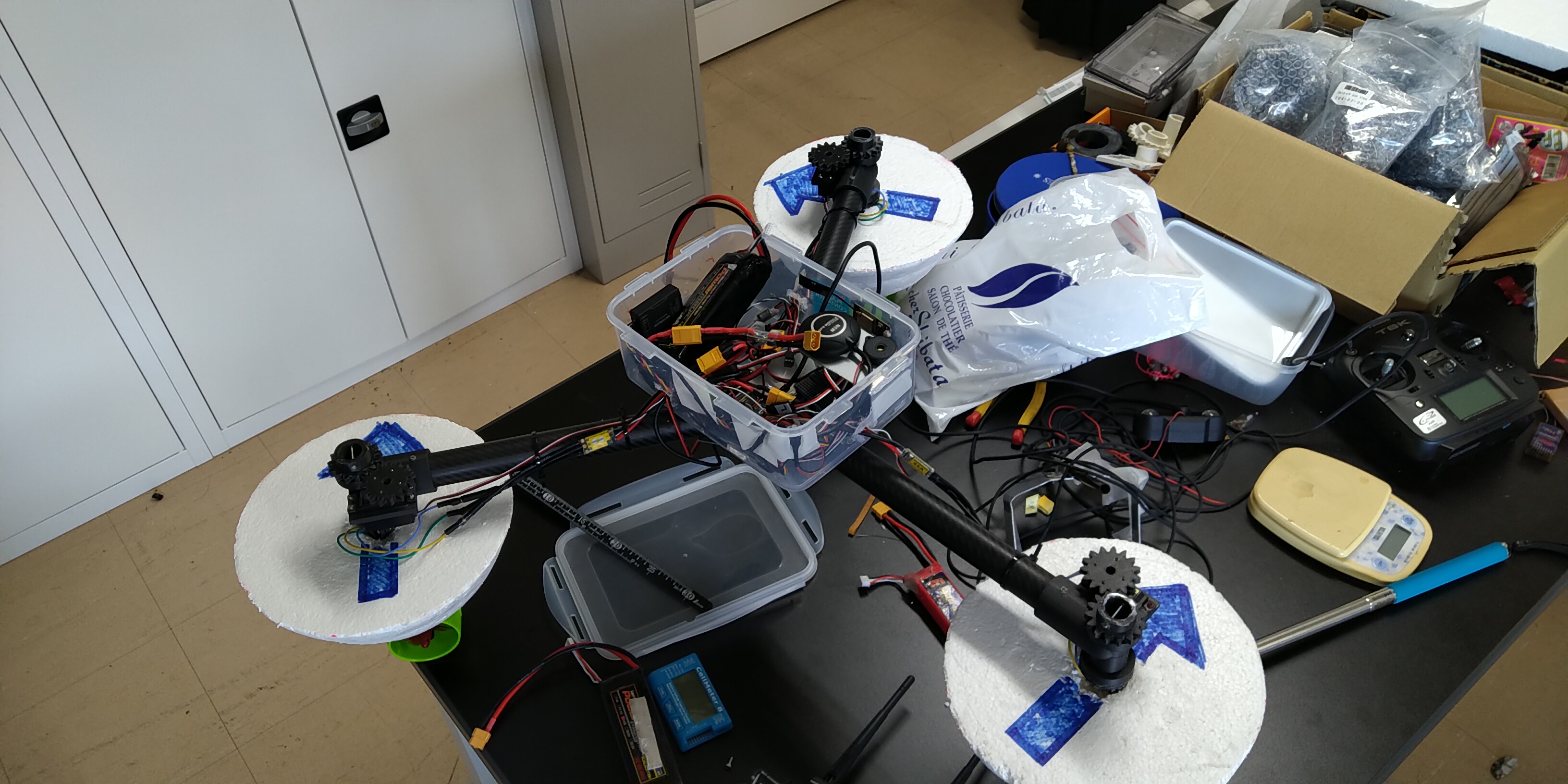
偏向3スラスタ水中ドローンは、移動速度によってスラスタが偏向して最適化するように設計して、それっぽく動いているのですが、ちゃんと動作を録画するために、まずスラスタのフロートに矢印をはっきり書き入れ。

そして、棒をつけて上にアクションカメラを乗せました。

今日はここまで。
次回録画しながら自動航行してみます。
そして、棒をつけて上にアクションカメラを乗せました。

今日はここまで。
次回録画しながら自動航行してみます。
水中ドローンの製作、その6
今後の方針:
とりあえず電波を受け取るものをフロートで受けてケーブルで伝えて潜水する水中ドローンのアイデアは実現しました。
次はこれを自律航行させます。
考え方としては、APMかPixhawkにコントローラを乗せ換え、
本体にコンパスを搭載、GPSはフロートでケーブルは張った状態で位置を追従させる。
深さがある程度までなら、船体とGPSの位置は大きくずれないだろうと考えてます。
そのためには、なるべく細いケーブルでフロートからピンと張った状態を作る。
深さをコントロールするために、スリップリングを通してケーブルを巻きとるのも良いか。
さらに、水中カメラを追加、フロート上から映像を電波で送って手元で確認できるようにしたいです。
とりあえず電波を受け取るものをフロートで受けてケーブルで伝えて潜水する水中ドローンのアイデアは実現しました。
次はこれを自律航行させます。
考え方としては、APMかPixhawkにコントローラを乗せ換え、
本体にコンパスを搭載、GPSはフロートでケーブルは張った状態で位置を追従させる。
深さがある程度までなら、船体とGPSの位置は大きくずれないだろうと考えてます。
そのためには、なるべく細いケーブルでフロートからピンと張った状態を作る。
深さをコントロールするために、スリップリングを通してケーブルを巻きとるのも良いか。
さらに、水中カメラを追加、フロート上から映像を電波で送って手元で確認できるようにしたいです。
水中ドローンの製作、その5
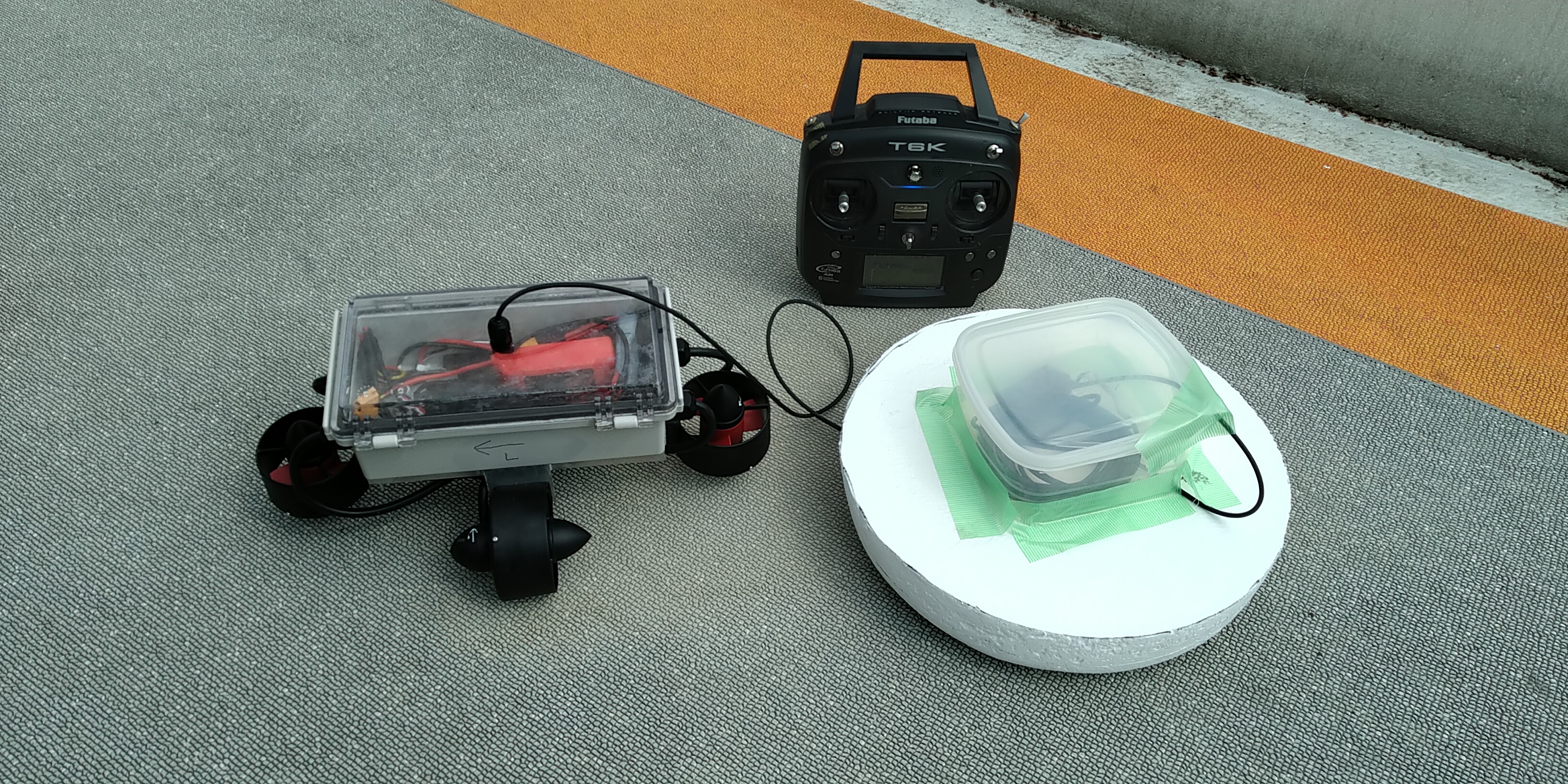
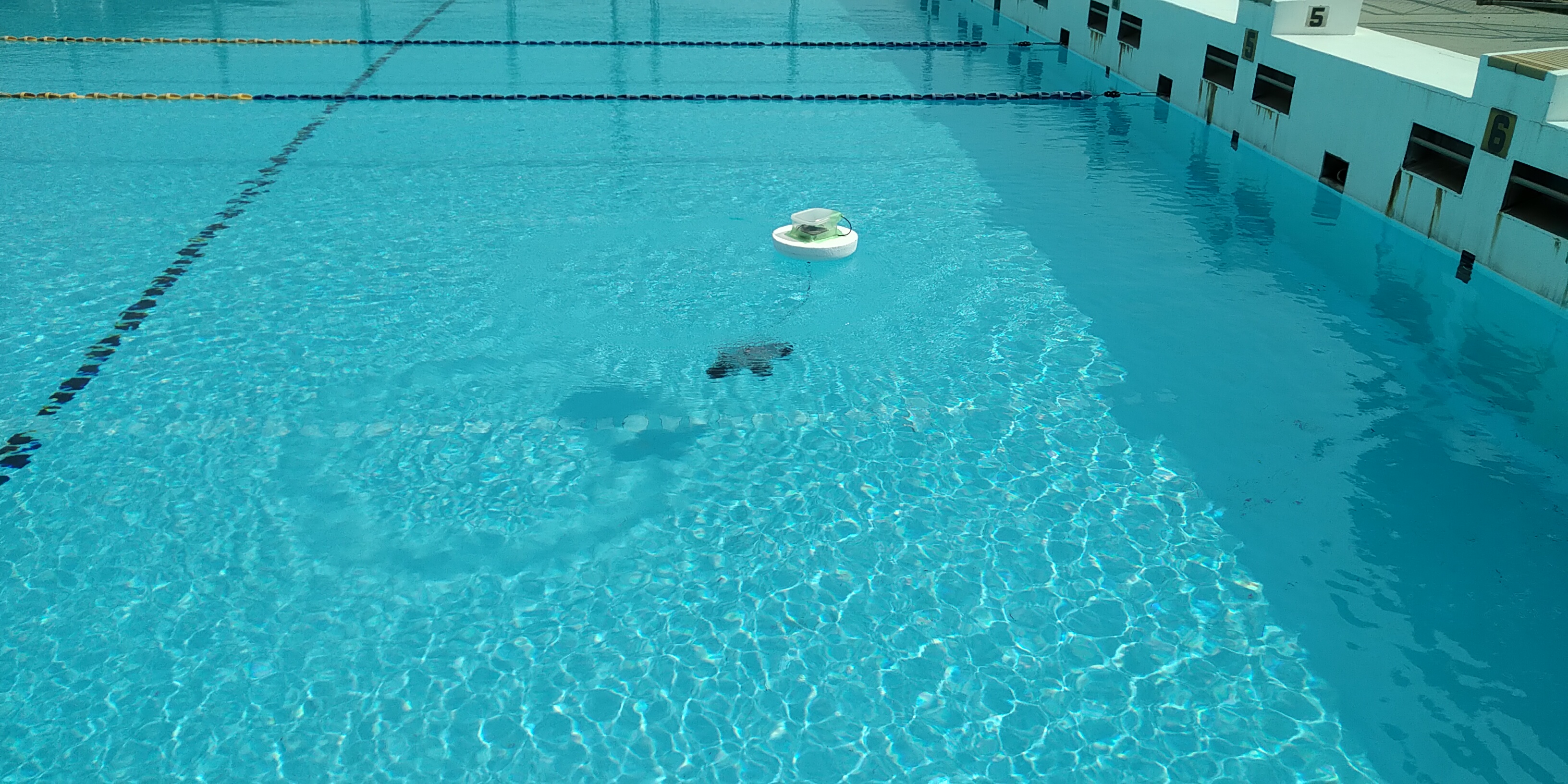
作ってる水中ドローンは、深さがほぼ一定で水深2m前後の所を航行するもの、できれば自動航行させたいという用途です。割と広い海域での航行なので、ケーブルに束縛されたくない、ならばケーブルの長さを限定して、フロートに受信機を乗せて引っ張れば良いのじゃないか、という考えです。
なので、発泡スチロールで丸いフロートを削って、受信機のケーブルを通し、念のため水没しないようにタッパーに入れて固定。

プールの水深は深い所でも1.5m程度なので、それ以下で1mより長いくらいで調整して長さを固定。

プールにフロートと船体とも浮かべてみました。

ここで、前後スラスターを回して沈降。

そのまま、左右スラスターで操舵。操作通りに水中で動いてます。

その時の動画。
なので、発泡スチロールで丸いフロートを削って、受信機のケーブルを通し、念のため水没しないようにタッパーに入れて固定。
プールの水深は深い所でも1.5m程度なので、それ以下で1mより長いくらいで調整して長さを固定。

プールにフロートと船体とも浮かべてみました。

ここで、前後スラスターを回して沈降。

そのまま、左右スラスターで操舵。操作通りに水中で動いてます。
その時の動画。

