Arduino Nano Everyを使ったロボトレーサ(ライントレースロボット)の製作 その3
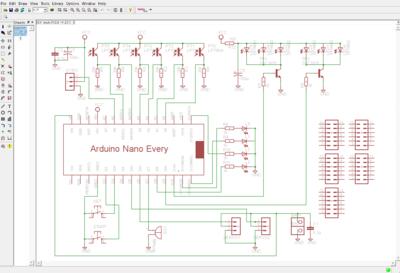
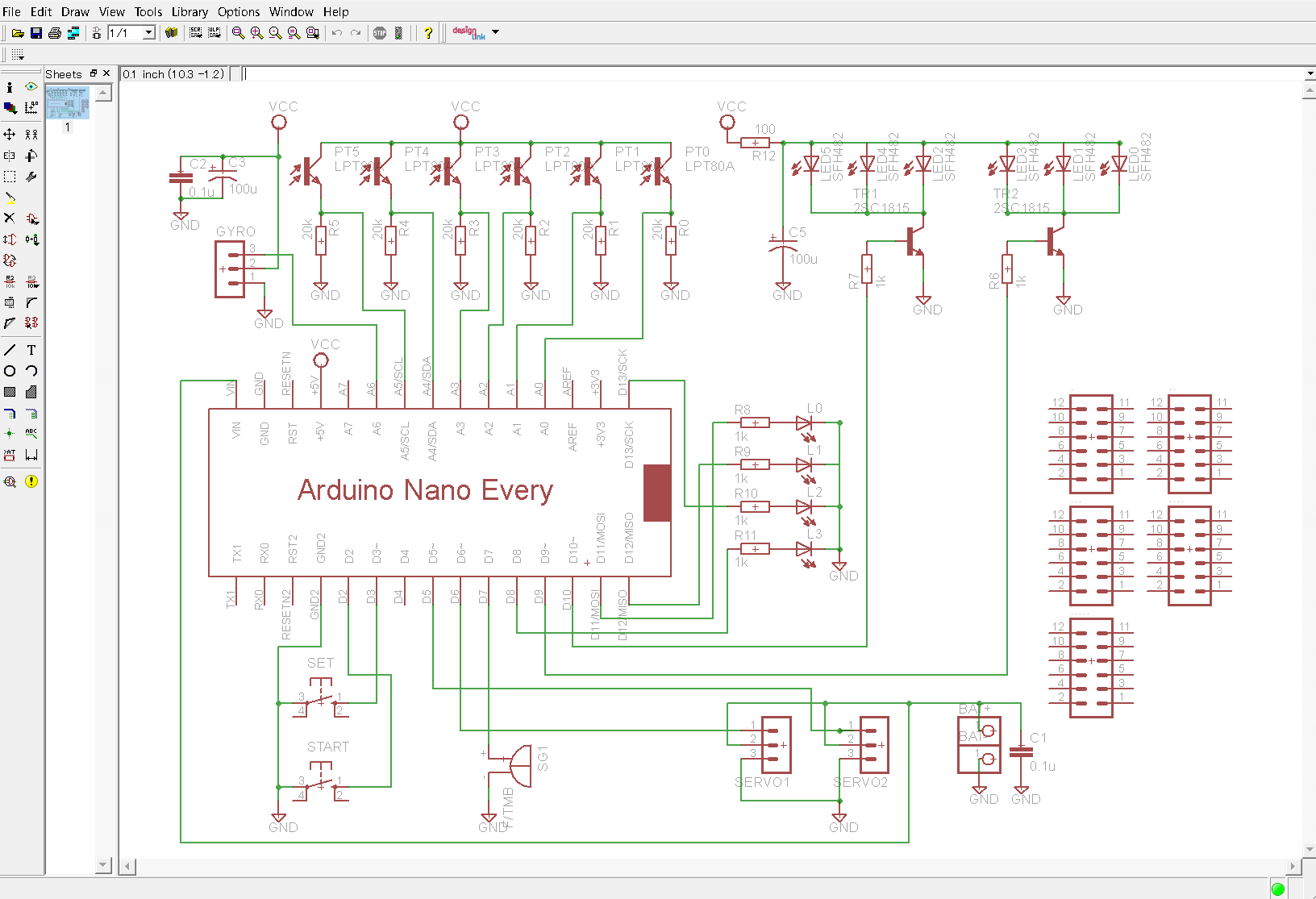
Eagleで回路設計。今はサブスクですが、何年も前に購入したものでまだ使えてます。
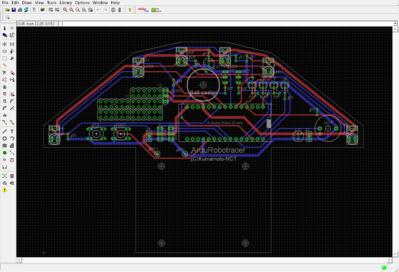
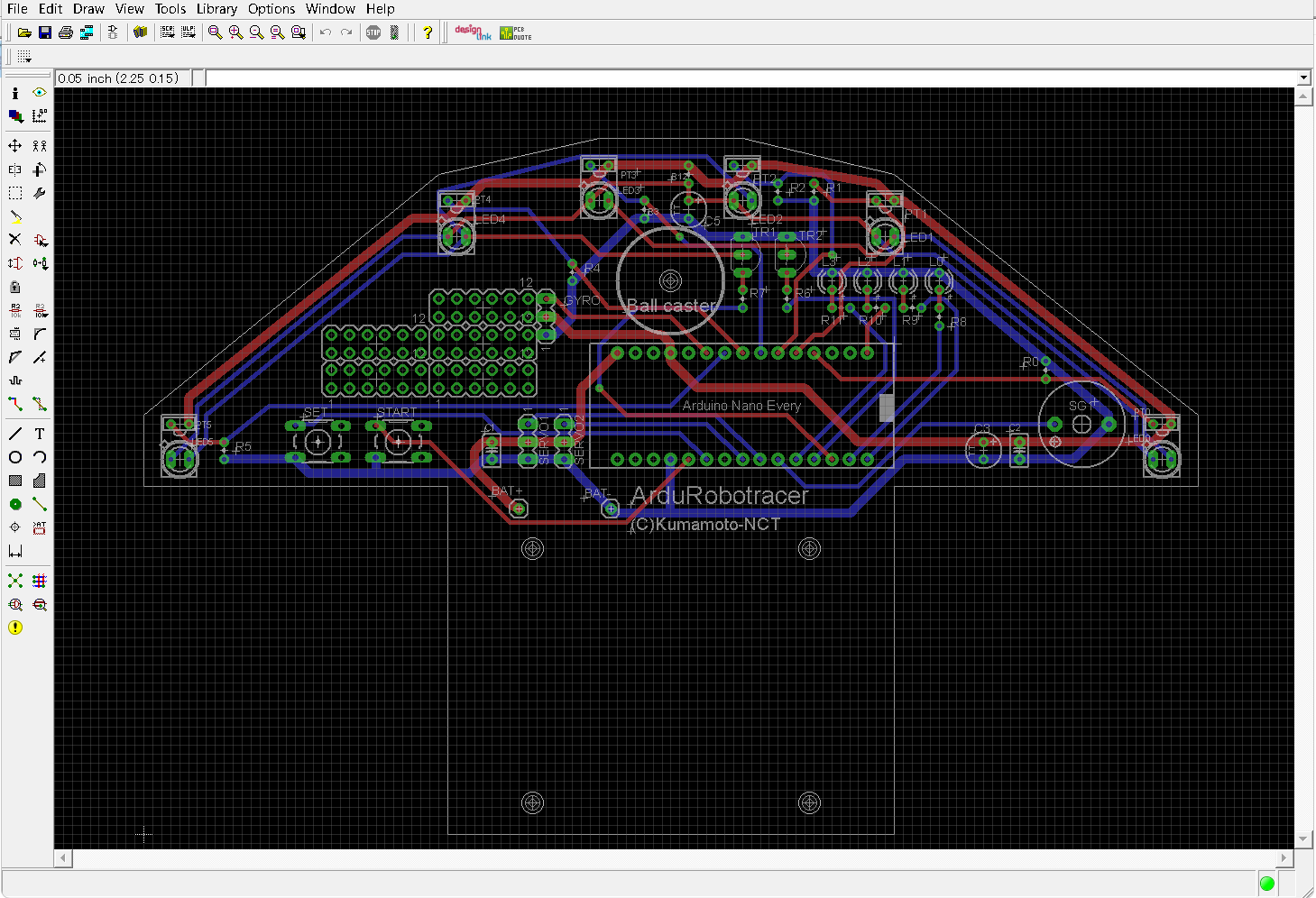
基板のパターンはこんな感じです。
配線は割とスカスカ。
電源ラインを太く引いて、電流が流れるところはなるべくスルーホールを使わない。
スルーホールはデジタル信号のみ。
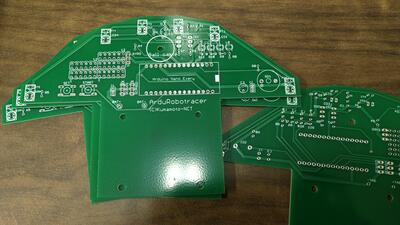
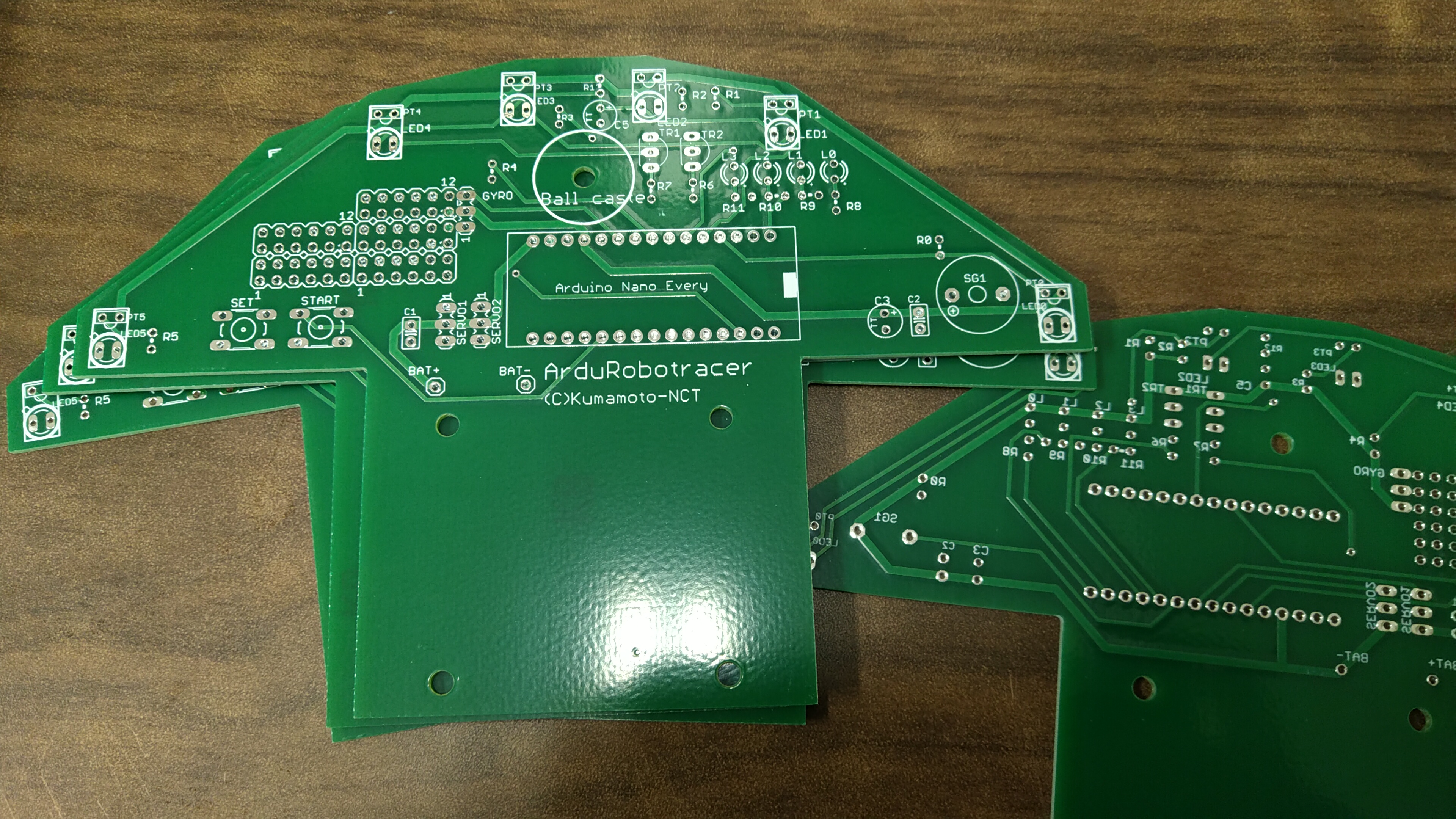
ということで、設計したものを発注。ユニバーサル基板で試作せずに発注したのと、1台作って相談元の相手方と議論できればいいので最低限の5枚で発注。
2週間くらいで届きました。
基板の色は黒にしとけばよかった、失敗。
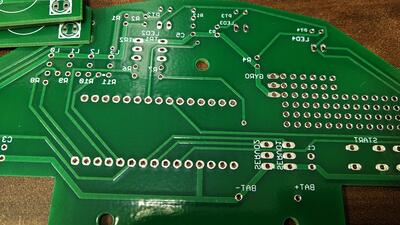
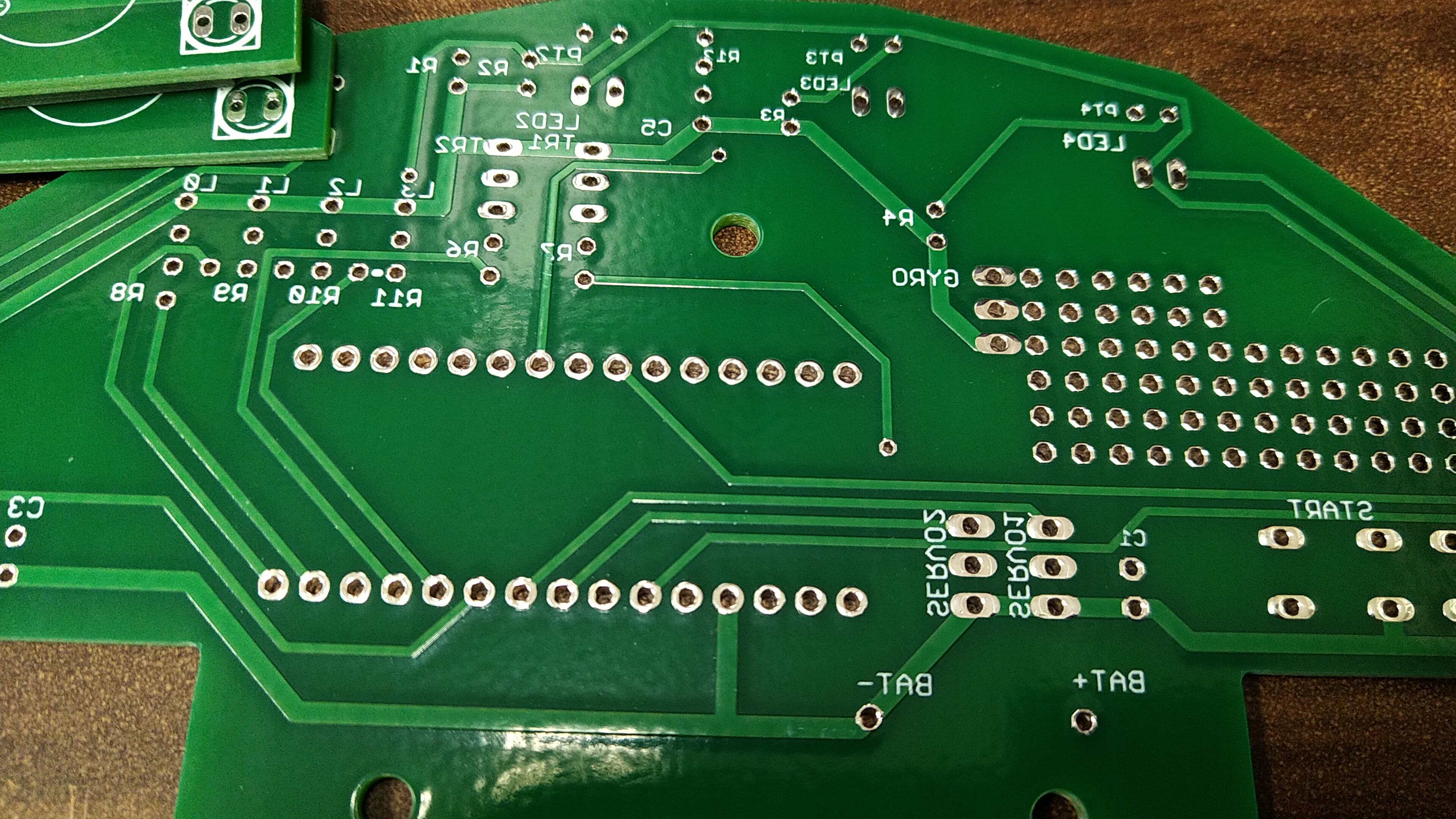
裏返すとさらに失敗あり、シルクが反転してます。パターン出力時のチェック入れ忘れ。
まあ、動作には関係ないのでよしです。
--追記--
基板は黒が良かったと書きましたが、製作してみたところ、緑でも特に反射の悪影響は見られませんでした。
基板のパターンはこんな感じです。
配線は割とスカスカ。
電源ラインを太く引いて、電流が流れるところはなるべくスルーホールを使わない。
スルーホールはデジタル信号のみ。
ということで、設計したものを発注。ユニバーサル基板で試作せずに発注したのと、1台作って相談元の相手方と議論できればいいので最低限の5枚で発注。
2週間くらいで届きました。
基板の色は黒にしとけばよかった、失敗。
裏返すとさらに失敗あり、シルクが反転してます。パターン出力時のチェック入れ忘れ。
まあ、動作には関係ないのでよしです。
--追記--
基板は黒が良かったと書きましたが、製作してみたところ、緑でも特に反射の悪影響は見られませんでした。



コメント一覧
コメント投稿

