Arduino Nano Everyを使ったロボトレーサ(ライントレースロボット)の製作 その2
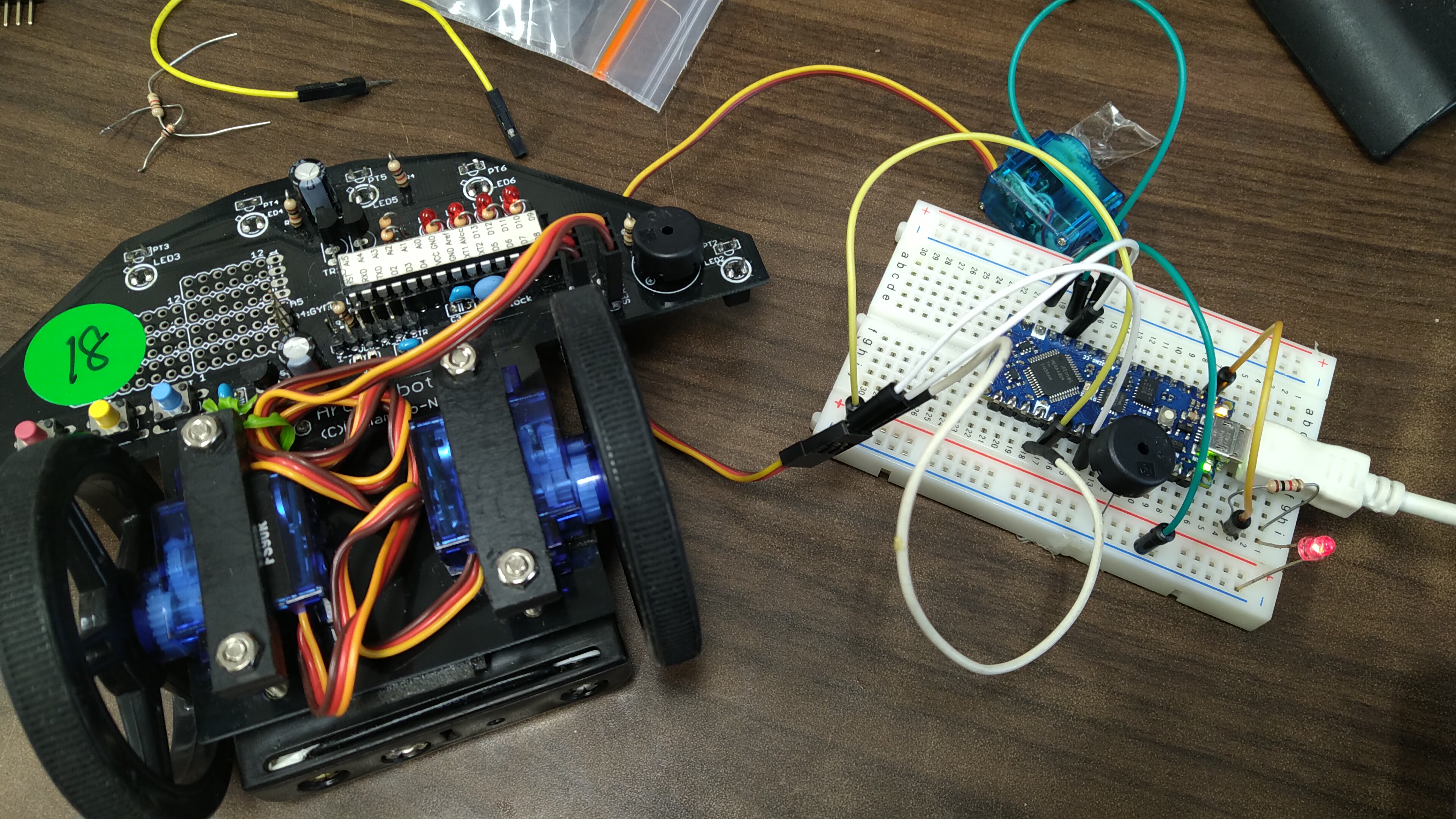
話が前後しましたが、Arduino Nano Everyで予備実験。
Atmega328Pで設計したArduinoロボトレーサと見比べながら、必要な機能をテスト。
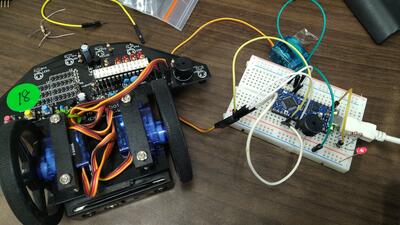
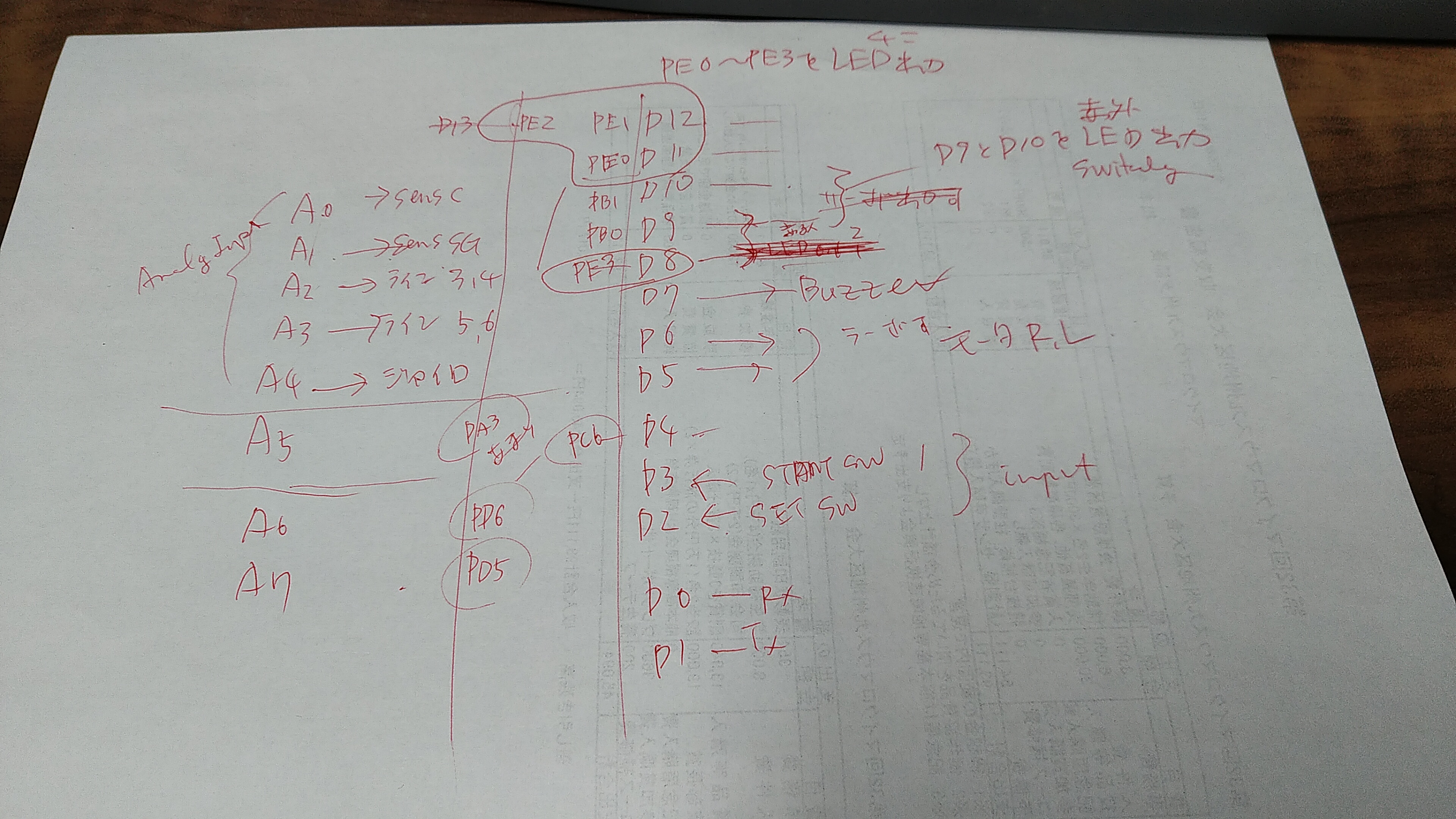
こんな感じで、ポートを確認しながら、ひとつずつ。
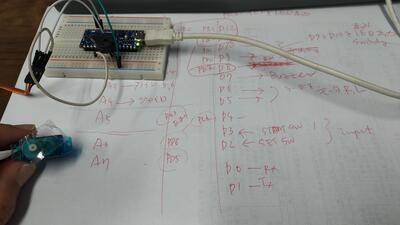
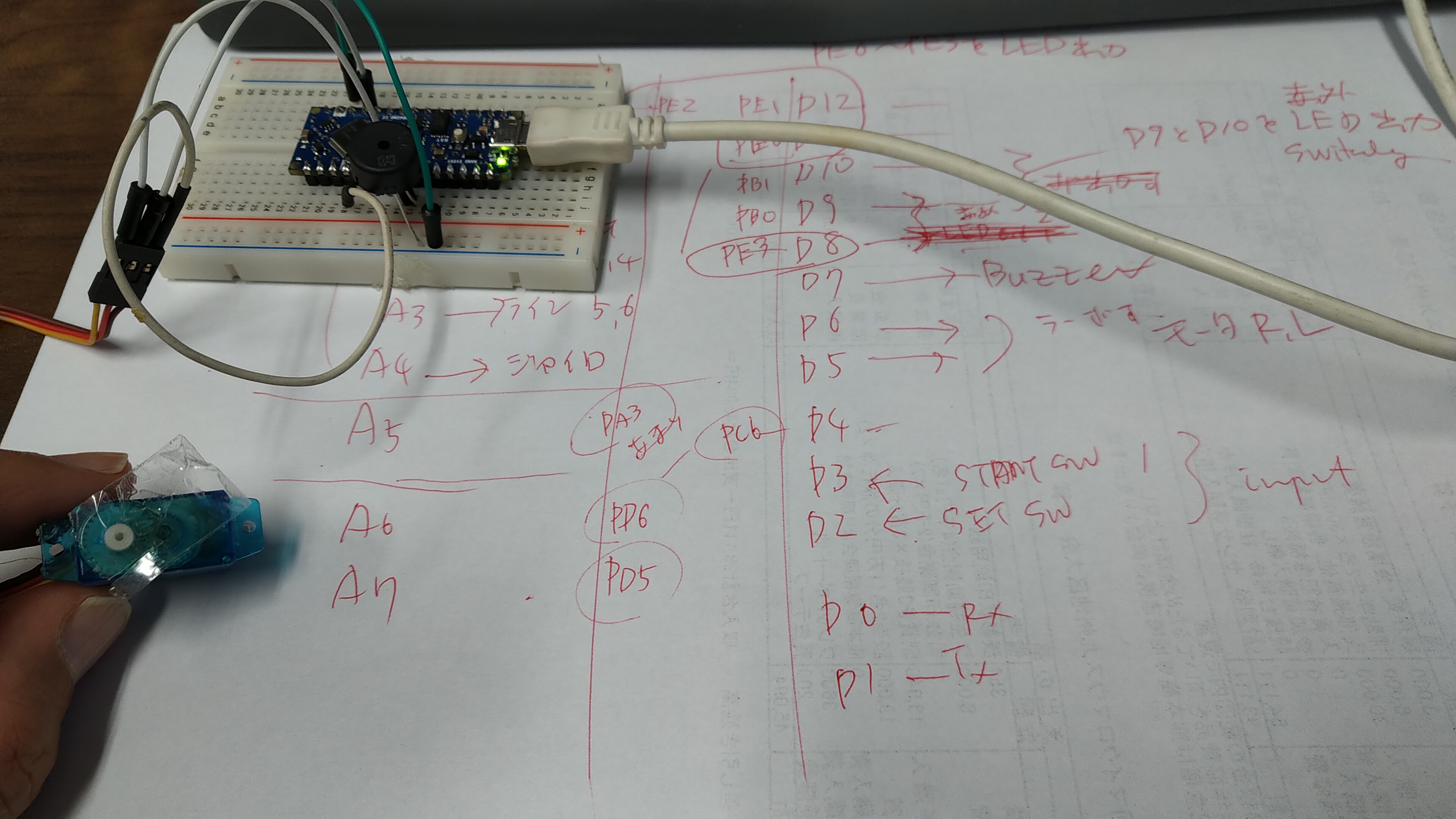
最終的にはこんな感じで、使えそうなポートを調べました。

デジタル入力でスイッチ2個。
D3: start sw
D4: set sw
D5,D6:PWMでサーボ出力を2個分。
D7:Tone関数でブザーによる音声出力
D9,D10: 赤外LED点灯のトランジスタスイッチング
D8,11,12,13:これらが、PEレジスタ下位4ビットなのでモード表示用LEDに使用
A0-A5:ラインとマーカー用センサ入力
A6:ジャイロセンサ用入力
アナログ入力の振り方は、パターンを引きながら考える。
これらのポートが同時に使えそうなことを一応確認。
広告→ ブランド: RT(アールティ) トレーニングトレーサー

Arduino Nano Every A Hands-On Guide【電子書籍】[ Agus Kurniawan ]
Atmega328Pで設計したArduinoロボトレーサと見比べながら、必要な機能をテスト。
こんな感じで、ポートを確認しながら、ひとつずつ。
最終的にはこんな感じで、使えそうなポートを調べました。
デジタル入力でスイッチ2個。
D3: start sw
D4: set sw
D5,D6:PWMでサーボ出力を2個分。
D7:Tone関数でブザーによる音声出力
D9,D10: 赤外LED点灯のトランジスタスイッチング
D8,11,12,13:これらが、PEレジスタ下位4ビットなのでモード表示用LEDに使用
A0-A5:ラインとマーカー用センサ入力
A6:ジャイロセンサ用入力
アナログ入力の振り方は、パターンを引きながら考える。
これらのポートが同時に使えそうなことを一応確認。
広告→ ブランド: RT(アールティ) トレーニングトレーサー
Arduino Nano Every A Hands-On Guide【電子書籍】[ Agus Kurniawan ]



コメント一覧
コメント投稿

