ArduinoNanoEveryを使ったマイクロマウスの構想 その4
中国から郵便が来ました。

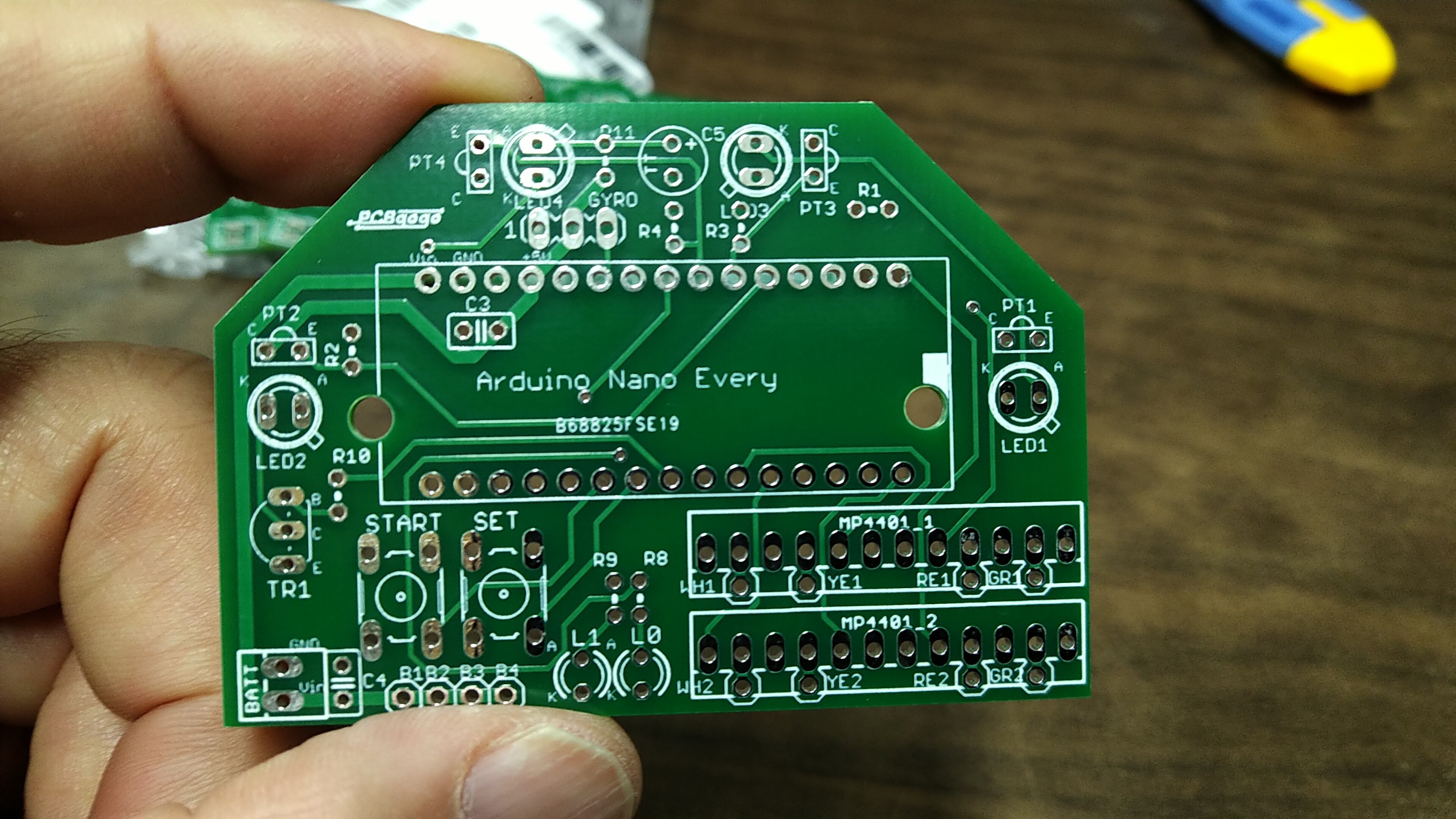
マイクロマウスの基板でした。以前書きこんだ、基板0円、送料のみのやつです。

開封したらPCBGOGOのロゴがこんなに控えめに。
もっと大きくて良かったんですが、場所がなかったせいでしょうか。申し訳ないです。


マイクロマウスの基板でした。以前書きこんだ、基板0円、送料のみのやつです。

開封したらPCBGOGOのロゴがこんなに控えめに。
もっと大きくて良かったんですが、場所がなかったせいでしょうか。申し訳ないです。


ESP32-DevKitC-32Dボードでラインにメッセージ
これも、サイトの通りやってみただけですが、
ESP32-DevKitC-32Dボードの基本的な使い方 ~Arduino IDE編~
http://microtechnica.xyz/?p=271
この後半部分、
「スイッチを押すとLINEに通知する」
の記事通り、LineにPCからログインして、トークンを作成して、スケッチにコピペ。
ボードに書き込んで、ボードのGP0ボタンを押すと、LineNotifyで自分にメッセージが飛んできました。
その動画
ボタンを押すとラインにメッセージを送ってスマホで着信。スマホで動画取ってるので、音が鳴るだけ。動いてるのは確認できるです。
なんか違うメッセージも送りたいと思って、マイコンじゃなくて、PCからLine Notifyにメッセージ送ってみようと思って検索したら、以下のサイトを見つけました。
[超簡単]LINE notify を使ってみる
https://qiita.com/iitenkida7/items/576a8226ba6584864d95
PCにインストールしたUbuntuから以下を送ると、メッセージがきました。
curl -X POST -H "Authorization: Bearer ACCESS_TOKEN" -F "message=ABC" https://notify-api.line.me/api/notify
phpで送る方法も書いてありました。
他にも以下のサイトがあります。
【使ってみた】LINE Notifyを使ってトークルームにメッセージ送信
https://www.smilevision.co.jp/blog/tsukatte01/
これもやってみただけですぐできました。
phpはメッセージをテキストで取り込むようサイトの例に2行追加してサーバーに保存。
$message = $_GET["message"];
echo $message; lineMessage.php
別に入力フォームを作るhtmlを書いて、テキスト入力画面と、一発送信ボタンを作ってみたら、どっちも問題なく動きました。
でも、メッセージ送ってほしいんだったらラインで友達になってればよいし、
ライン友達でない人からメッセージ送れるようようにする意味もあんまりないですね。
やっぱりマイコンから送れる、というところが一番面白いのかも。
ESP32-DevKitC-32Dボードの基本的な使い方 ~Arduino IDE編~
http://microtechnica.xyz/?p=271
この後半部分、
「スイッチを押すとLINEに通知する」
の記事通り、LineにPCからログインして、トークンを作成して、スケッチにコピペ。
ボードに書き込んで、ボードのGP0ボタンを押すと、LineNotifyで自分にメッセージが飛んできました。
その動画
ボタンを押すとラインにメッセージを送ってスマホで着信。スマホで動画取ってるので、音が鳴るだけ。動いてるのは確認できるです。
なんか違うメッセージも送りたいと思って、マイコンじゃなくて、PCからLine Notifyにメッセージ送ってみようと思って検索したら、以下のサイトを見つけました。
[超簡単]LINE notify を使ってみる
https://qiita.com/iitenkida7/items/576a8226ba6584864d95
PCにインストールしたUbuntuから以下を送ると、メッセージがきました。
curl -X POST -H "Authorization: Bearer ACCESS_TOKEN" -F "message=ABC" https://notify-api.line.me/api/notify
phpで送る方法も書いてありました。
他にも以下のサイトがあります。
【使ってみた】LINE Notifyを使ってトークルームにメッセージ送信
https://www.smilevision.co.jp/blog/tsukatte01/
これもやってみただけですぐできました。
phpはメッセージをテキストで取り込むようサイトの例に2行追加してサーバーに保存。
$message = $_GET["message"];
echo $message; lineMessage.php
別に入力フォームを作るhtmlを書いて、テキスト入力画面と、一発送信ボタンを作ってみたら、どっちも問題なく動きました。
でも、メッセージ送ってほしいんだったらラインで友達になってればよいし、
ライン友達でない人からメッセージ送れるようようにする意味もあんまりないですね。
やっぱりマイコンから送れる、というところが一番面白いのかも。
水中スラスターの推力を測ってみた。
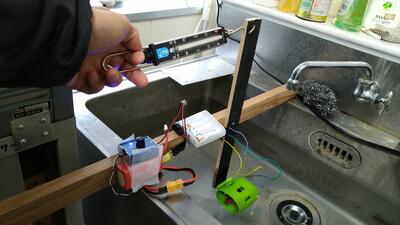
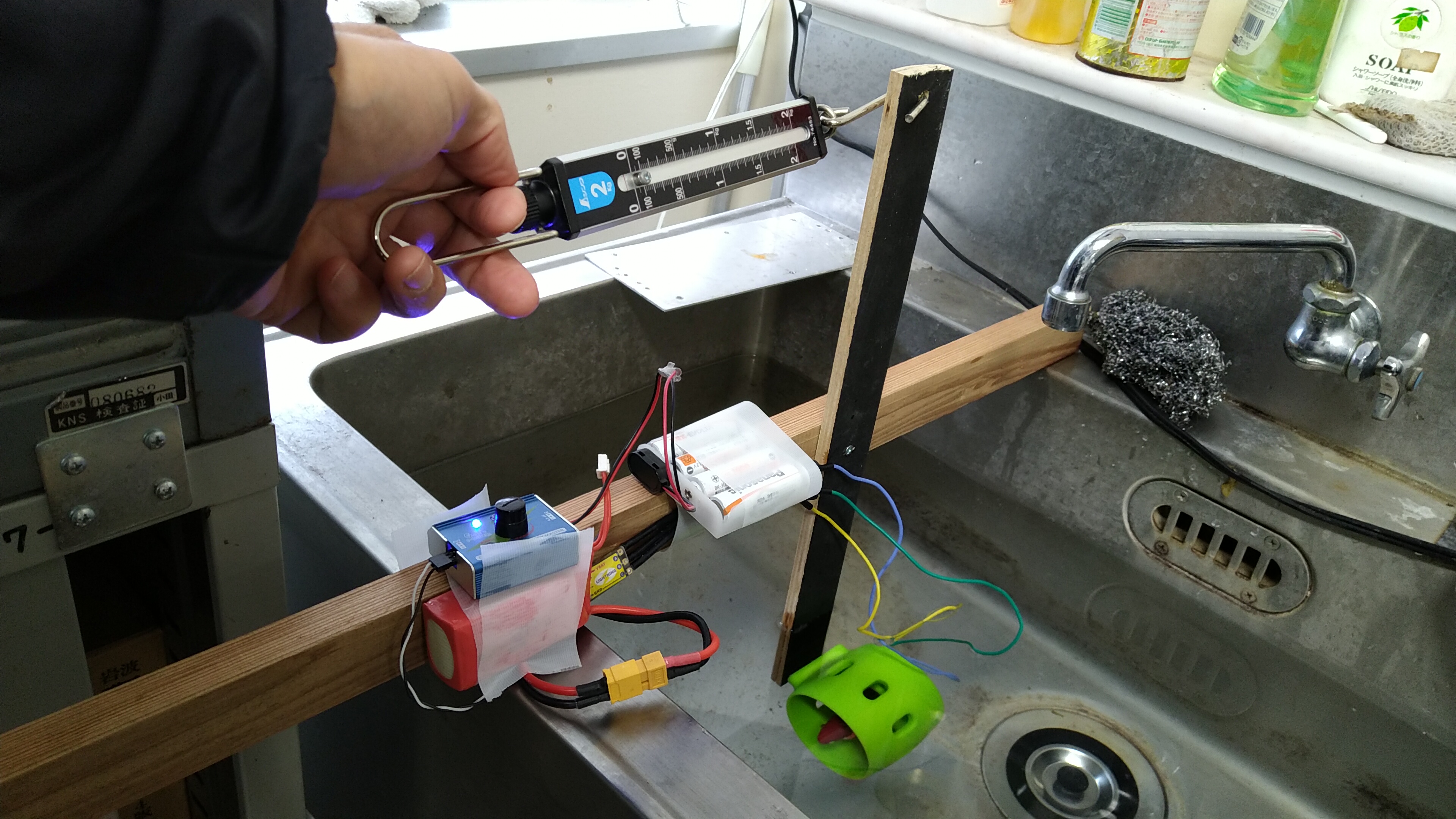
折角なので、簡易的な推力測定を行ってみました。
適当な端材をねじ止めして、ばねばかりで引っ張ります。
実験動画はこちら。
3セル11.1V,1.4Ahのリポバッテリーで最高まで上げて約800gの推力が出ました。
アンプは6セル45Aまで行けるので、この数倍は推力が出せるでしょう。
購入はこちら。
ボート水中モーター、Funien 1000KV水中ブラシレスモーター時計回り4ブレードプロペラ付き12-24V防水電気モータードライブエンジン(RCベイトボートネストシップ用)
適当な端材をねじ止めして、ばねばかりで引っ張ります。
実験動画はこちら。
3セル11.1V,1.4Ahのリポバッテリーで最高まで上げて約800gの推力が出ました。
アンプは6セル45Aまで行けるので、この数倍は推力が出せるでしょう。
購入はこちら。
ボート水中モーター、Funien 1000KV水中ブラシレスモーター時計回り4ブレードプロペラ付き12-24V防水電気モータードライブエンジン(RCベイトボートネストシップ用)
水中スラスター購入しました
先日ネットで見つけた水中スラスターを購入しました。
ダンボール箱で到着。
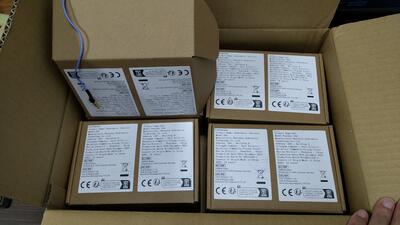
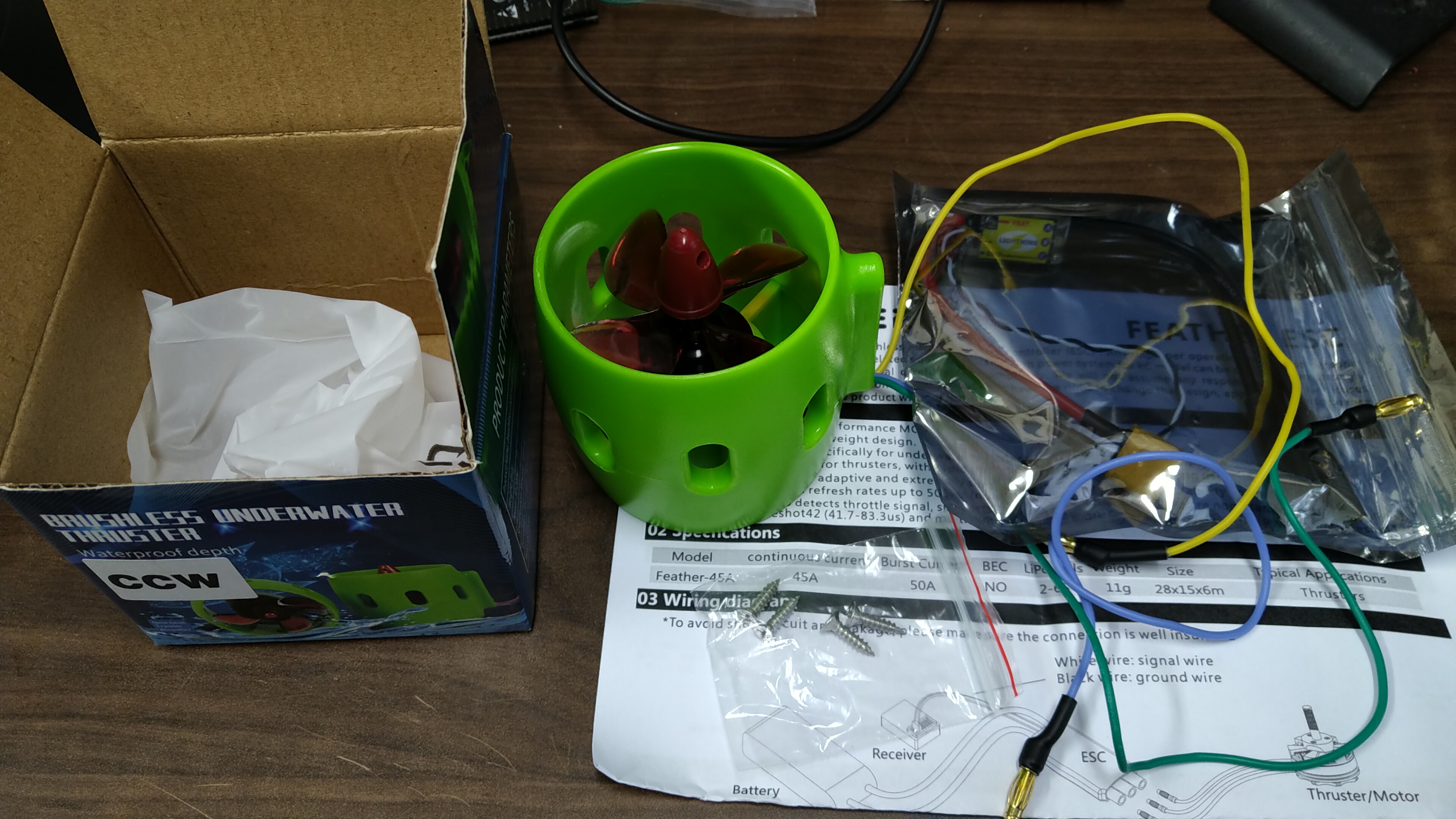
内容物は、スラスター、ネジ、ESC、説明書。

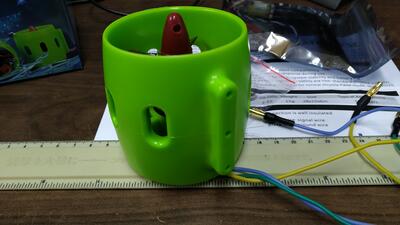
サイズ感とネジ取り付け部分はこんな感じ。外形70㎜です。
モーター裏面の接続部分は防水。

ESCは45Aで双方向に回転できます。

動画はこちら。
BECがついてないので、サーボコントローラを左いっぱいに絞った状態で接続。それからボリュームを回していくと、サーボがセンターくらいで初期化のビープが鳴ります。その後は、ボリュームを左右に回すと、スラスターが正逆転。
最後にサーボコントローラをスイープさせると、スラスターの回転も交互に回転してます。
もちろん、電源投入時にサーボコントローラをセンターに合わせておくと、最初からセンターで初期化されます。
購入はこちら。
ボート水中モーター、Funien 1000KV水中ブラシレスモーター時計回り4ブレードプロペラ付き12-24V防水電気モータードライブエンジン(RCベイトボートネストシップ用)
ダンボール箱で到着。
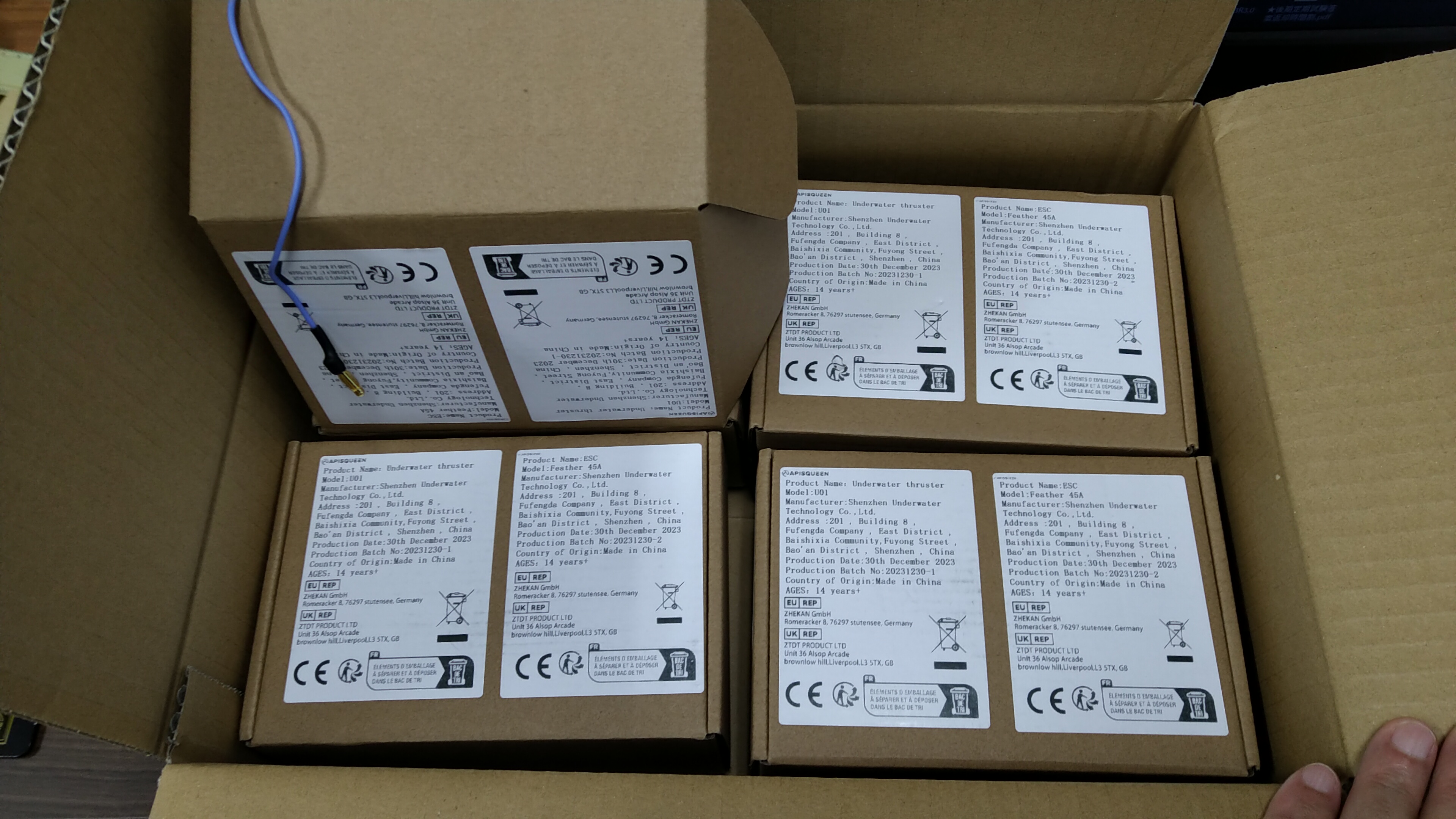
内容物は、スラスター、ネジ、ESC、説明書。
サイズ感とネジ取り付け部分はこんな感じ。外形70㎜です。
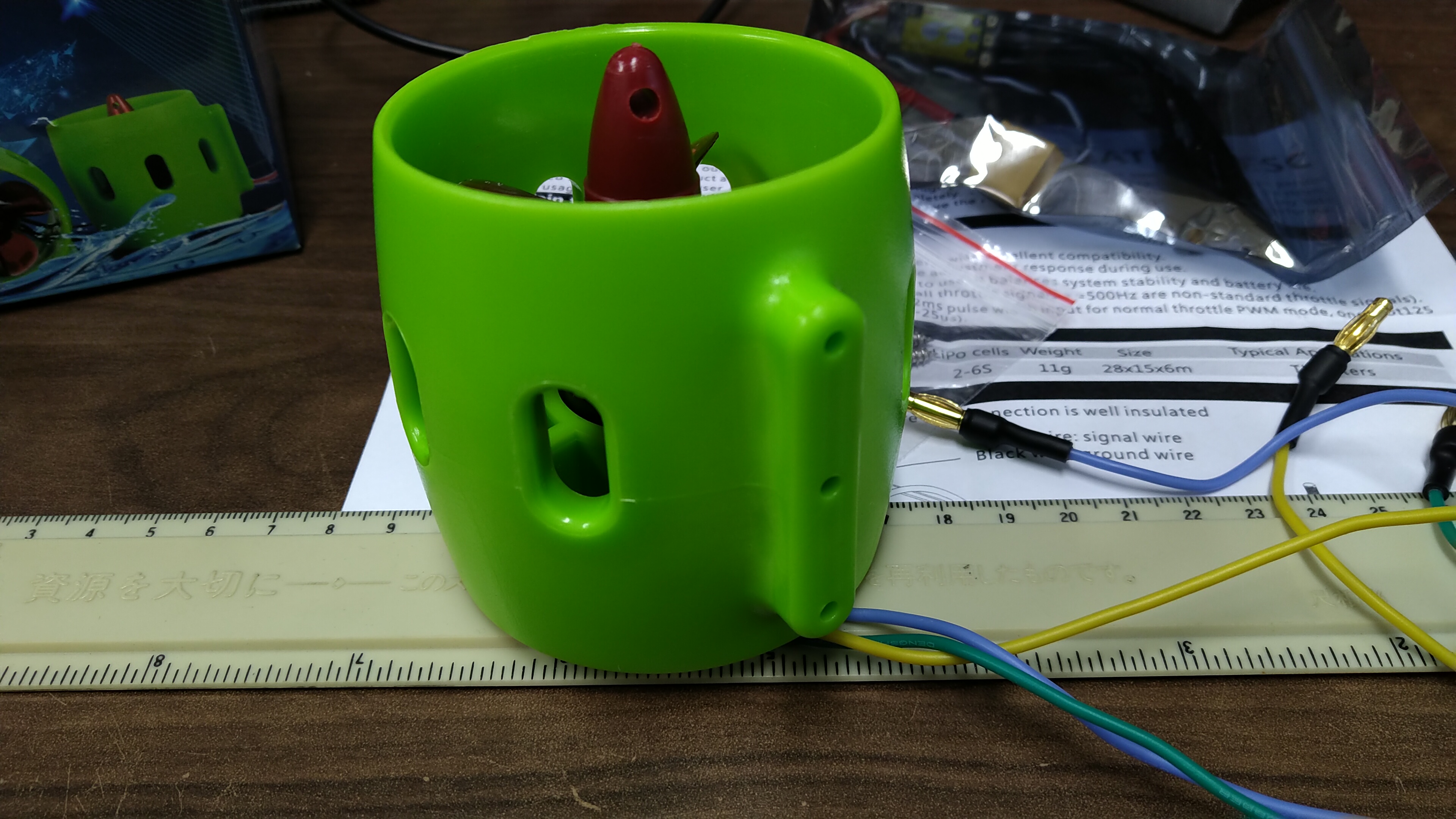
モーター裏面の接続部分は防水。

ESCは45Aで双方向に回転できます。
動画はこちら。
BECがついてないので、サーボコントローラを左いっぱいに絞った状態で接続。それからボリュームを回していくと、サーボがセンターくらいで初期化のビープが鳴ります。その後は、ボリュームを左右に回すと、スラスターが正逆転。
最後にサーボコントローラをスイープさせると、スラスターの回転も交互に回転してます。
もちろん、電源投入時にサーボコントローラをセンターに合わせておくと、最初からセンターで初期化されます。
購入はこちら。
ボート水中モーター、Funien 1000KV水中ブラシレスモーター時計回り4ブレードプロペラ付き12-24V防水電気モータードライブエンジン(RCベイトボートネストシップ用)

さくらのブログのURL変えました。
最初にさくらインターネットと契約したときにさくらのブログを作り、コンテンツがなかったので
www.cpu4edu.netをブログのURLにしてましたが、ホームページを作り直したので整理しました。
ホームページは、
https://cpu4edu.net
https://www.cpu4edu.net
ブログは、
https://cpu4edu.net/cafe
以前からあったさくらのブログはサブドメインの、blog.cpu4edu.net に移しました。
さくらのブログの場合は、SSLにできないのでセキュリティ上警告がでる場合があるようです。
もうさくらのブログの利用は推奨されてないってことでしょうね?
設定を更新してから反映されるまでにしばらくかかるようです。
いま、http://blog.cpu4edu.net/ にアクセスするとつながりますが、
www.cpu4edu.net にアクセスしてもつながりません。
さくらのブログには2006年から書いてた楽天ブログを移行しようと思ったのですが記事が数千件あって手作業で移行するしかなかったので記事を200件くらい書いたところで挫折しました。さくらのブログは新規に作れないので消さずにたぶん放置です。コンテンツをクリックすると、こっちに飛んでくるようになってます。
www.cpu4edu.netをブログのURLにしてましたが、ホームページを作り直したので整理しました。
ホームページは、
https://cpu4edu.net
https://www.cpu4edu.net
ブログは、
https://cpu4edu.net/cafe
以前からあったさくらのブログはサブドメインの、blog.cpu4edu.net に移しました。
さくらのブログの場合は、SSLにできないのでセキュリティ上警告がでる場合があるようです。
もうさくらのブログの利用は推奨されてないってことでしょうね?
設定を更新してから反映されるまでにしばらくかかるようです。
いま、http://blog.cpu4edu.net/ にアクセスするとつながりますが、
www.cpu4edu.net にアクセスしてもつながりません。
さくらのブログには2006年から書いてた楽天ブログを移行しようと思ったのですが記事が数千件あって手作業で移行するしかなかったので記事を200件くらい書いたところで挫折しました。さくらのブログは新規に作れないので消さずにたぶん放置です。コンテンツをクリックすると、こっちに飛んでくるようになってます。

