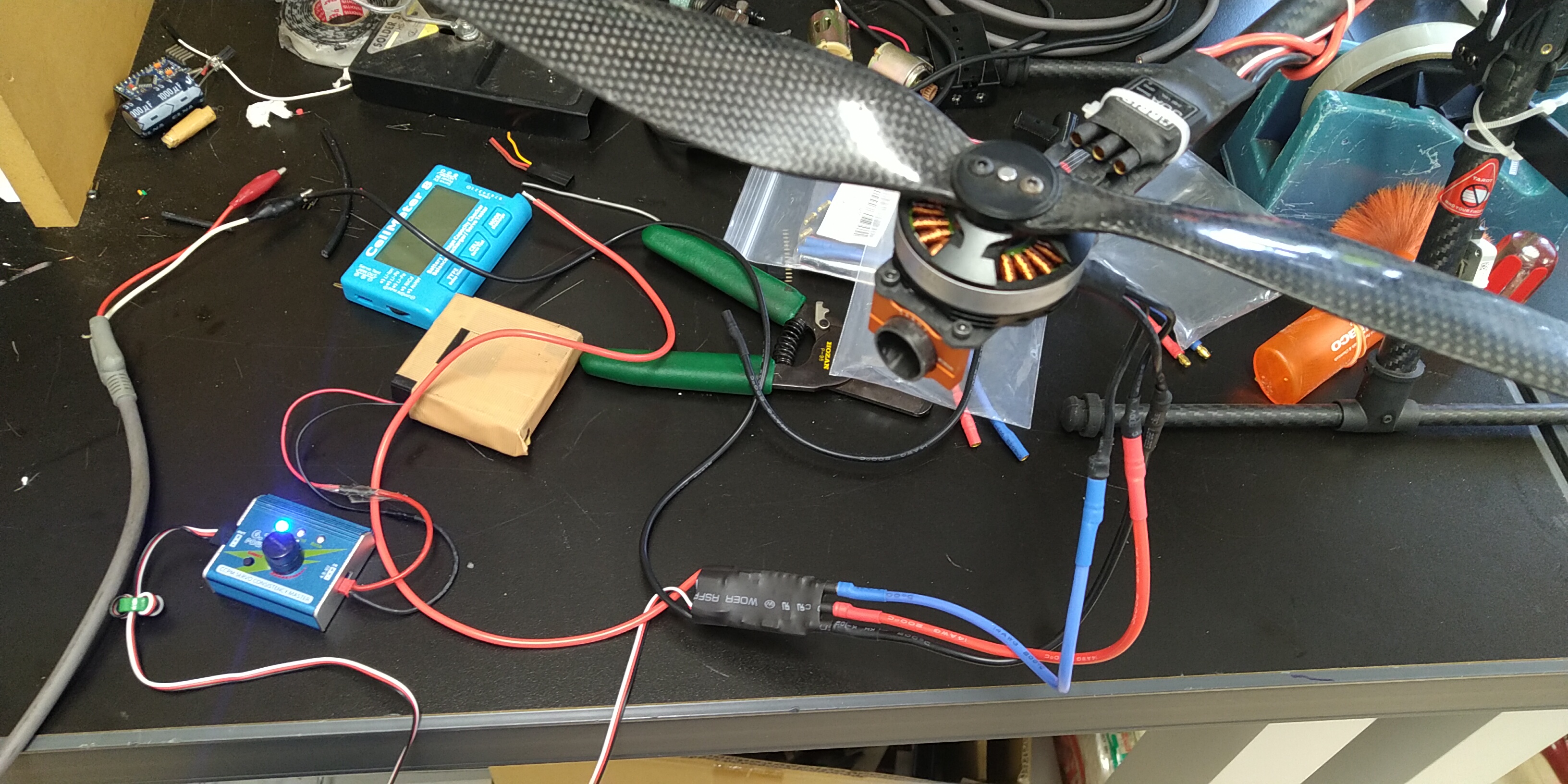
ブラシレスモータのESCのケーブル延長
模型用のブラシレスモータは3本のケーブルで順にコイルを励磁して回してるため、ケーブルは短く作ってあるのですが、機体をケースに収める時の寸法の都合でケーブルを延長しないといけなくなりました。
良いことはないのですが、とりあえず回るか不具合は出ないか確認。
別の用途を考えているものと同じモータ・プロペラの付いたクワッドコプタの接続を外してケーブルを20㎝だけ延長、延長用のケーブルが売ってあるのでこのくらいは大丈夫だとは思いますが、念のため実験。
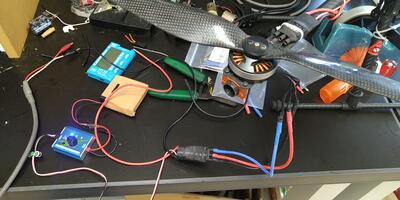
無事、高負荷で回しても大丈夫でした。
良いことはないのですが、とりあえず回るか不具合は出ないか確認。
別の用途を考えているものと同じモータ・プロペラの付いたクワッドコプタの接続を外してケーブルを20㎝だけ延長、延長用のケーブルが売ってあるのでこのくらいは大丈夫だとは思いますが、念のため実験。
無事、高負荷で回しても大丈夫でした。


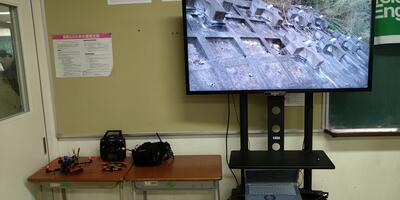
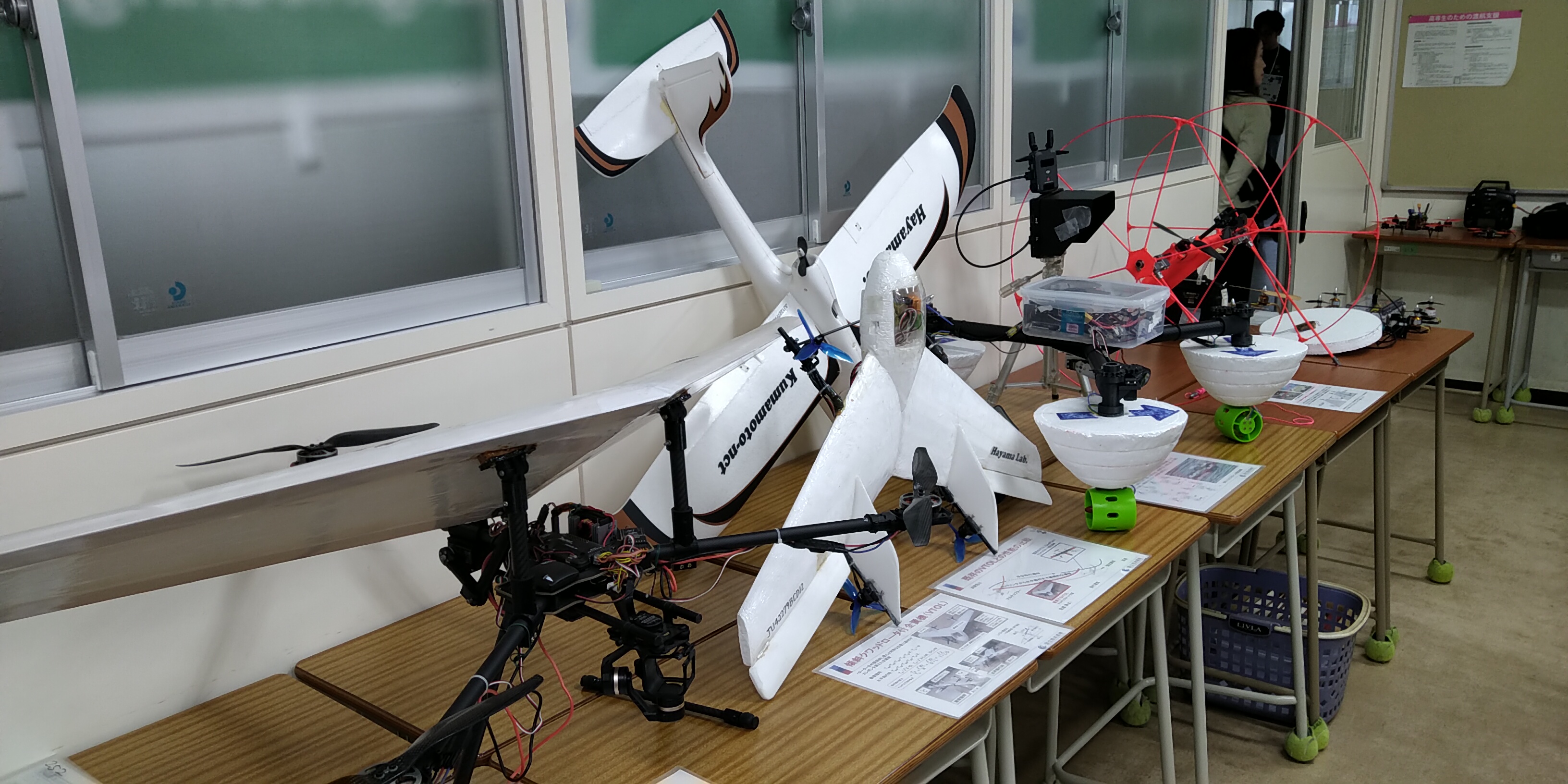
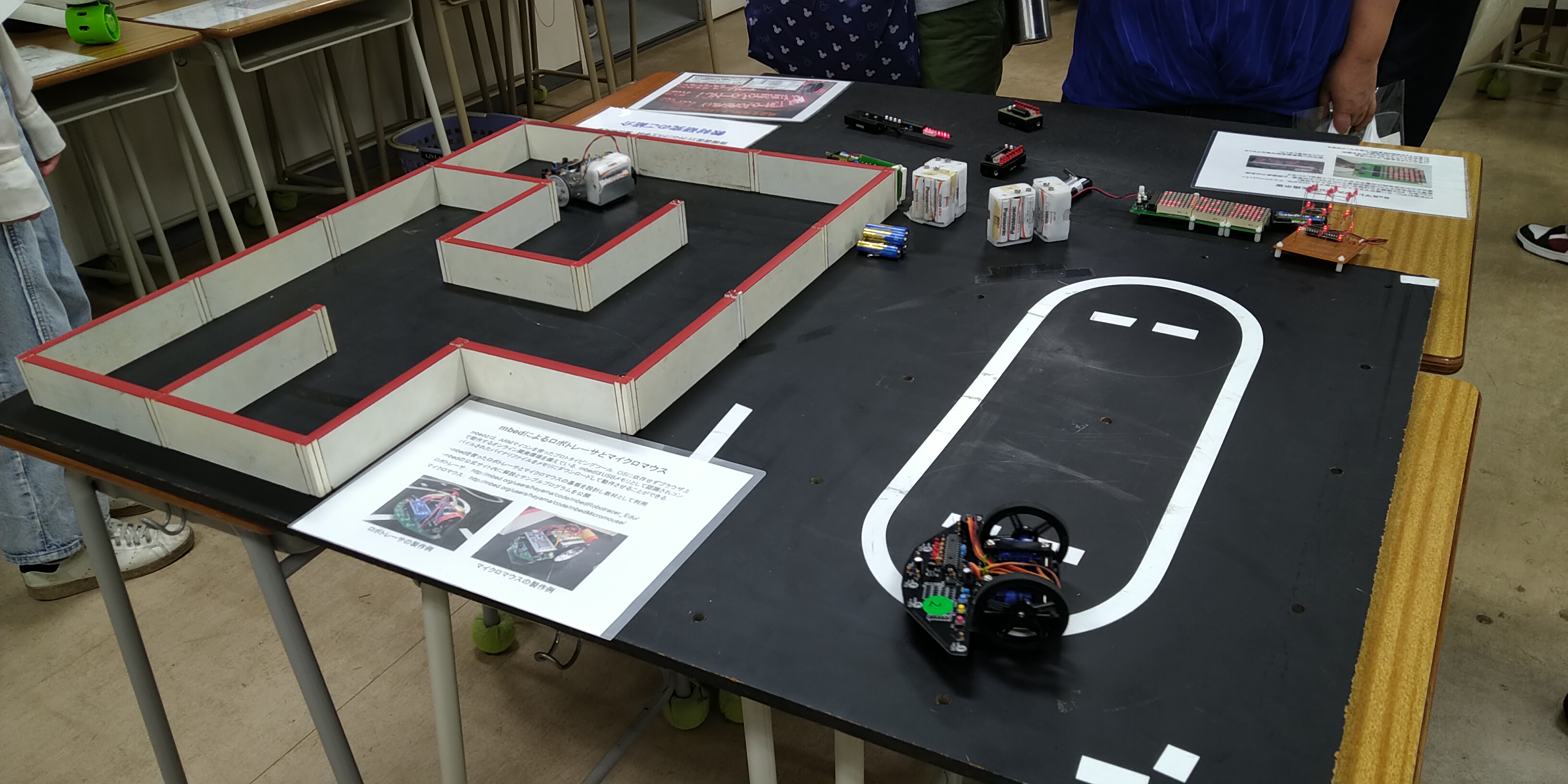
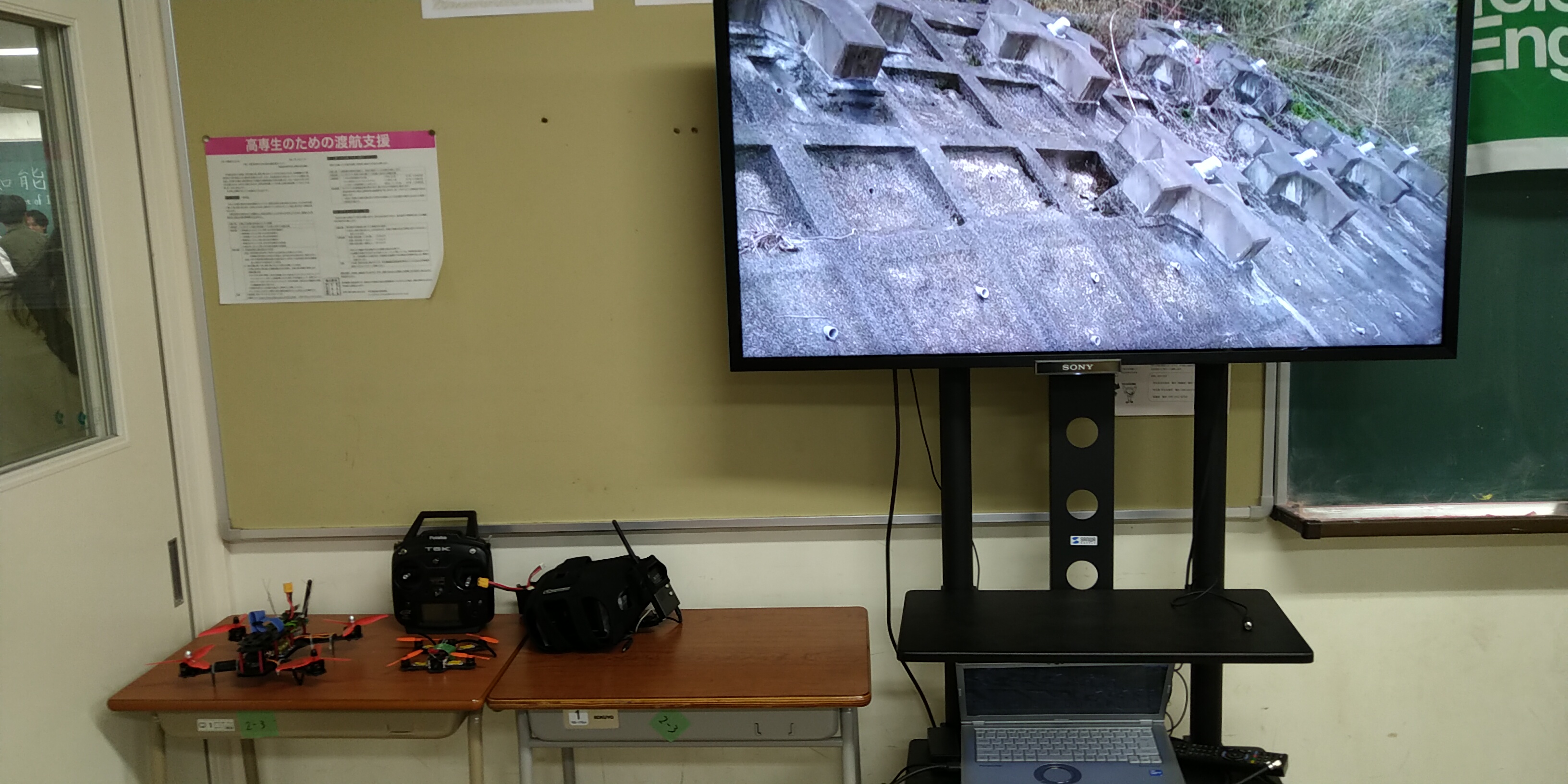
オープンキャンパスの風景
某Kosenのオープンキャンパスの出展の様子です。
これまで作ったドローンいろいろ。

教材のマイクロマウスとロボトレーサ
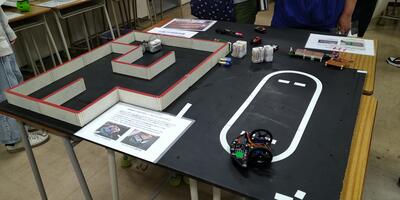
あと、テレビに動画を4つくらいループで流してました。
これまで作ったドローンいろいろ。
教材のマイクロマウスとロボトレーサ
あと、テレビに動画を4つくらいループで流してました。
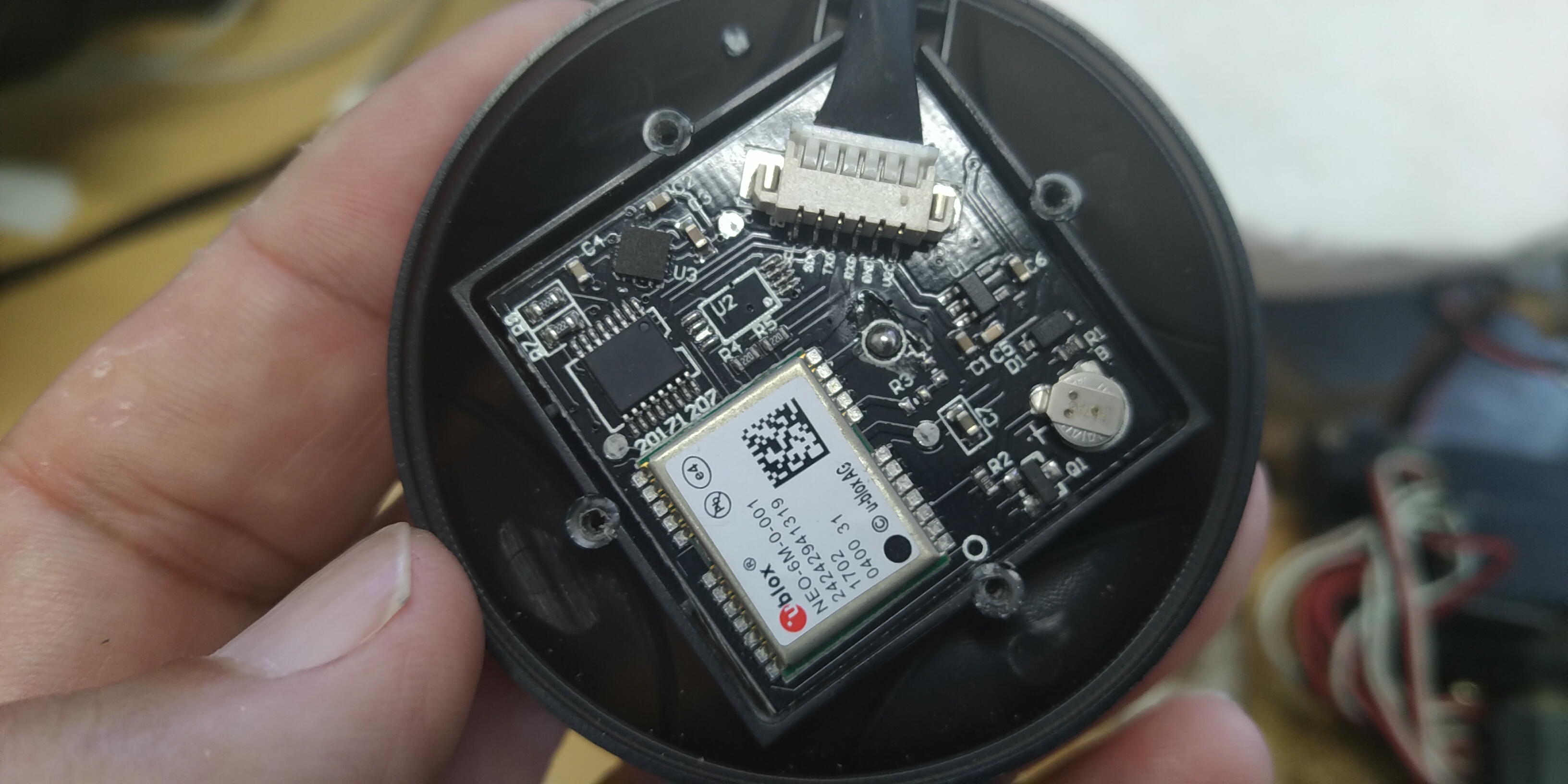
APM2.6のGPSアンテナを分解
APM2.6だったか購入したときについてきたGPSアンテナ。
このバージョンは、アンテナの中にコンパスが入ってて、I2Cで接続できるのでコネクタが2つに分かれてます。

分解してみたらこんな感じで、基板に斜めについてるICが左上にあります。
これが多分コンパス。
取り外して別々に使いたい、と思って分解したのですが、どうやら無理っぽいですね。

このバージョンは、アンテナの中にコンパスが入ってて、I2Cで接続できるのでコネクタが2つに分かれてます。

分解してみたらこんな感じで、基板に斜めについてるICが左上にあります。
これが多分コンパス。
取り外して別々に使いたい、と思って分解したのですが、どうやら無理っぽいですね。
ケーブルカメラ付き自動航行ボートの暗視カメラ化
以前作ったケーブルカメラ付き自動航行ボートのカメラを共同研究先に提供したのですが、暗い所で写らないという話です。
スマホで見たら赤外線の感度は多少あったのでこれで良いかと思ってたのですが、別の暗視カメラと比べるとかなり暗いので、カメラ交換かなぁ?と思っていたのですが、もしかして上手くいけばと思いカメラを分解

するとやっぱり、赤外線フィルタがレンズ側に入っていました。
どこかにフィルタが入ってるだろうと思ったのですが、こんなに取り外しやすい所に張り付けてあるだけで超ラッキーです。

試しに、カメラの前に取り外したフィルタをかざすと、そこだけ丁度、四角く暗くなります。

結果、こんな感じに赤外線感度を持つカメラになりました。
色味が変りましたが可視光でも使えます。

スマホで見たら赤外線の感度は多少あったのでこれで良いかと思ってたのですが、別の暗視カメラと比べるとかなり暗いので、カメラ交換かなぁ?と思っていたのですが、もしかして上手くいけばと思いカメラを分解

するとやっぱり、赤外線フィルタがレンズ側に入っていました。
どこかにフィルタが入ってるだろうと思ったのですが、こんなに取り外しやすい所に張り付けてあるだけで超ラッキーです。

試しに、カメラの前に取り外したフィルタをかざすと、そこだけ丁度、四角く暗くなります。
結果、こんな感じに赤外線感度を持つカメラになりました。
色味が変りましたが可視光でも使えます。

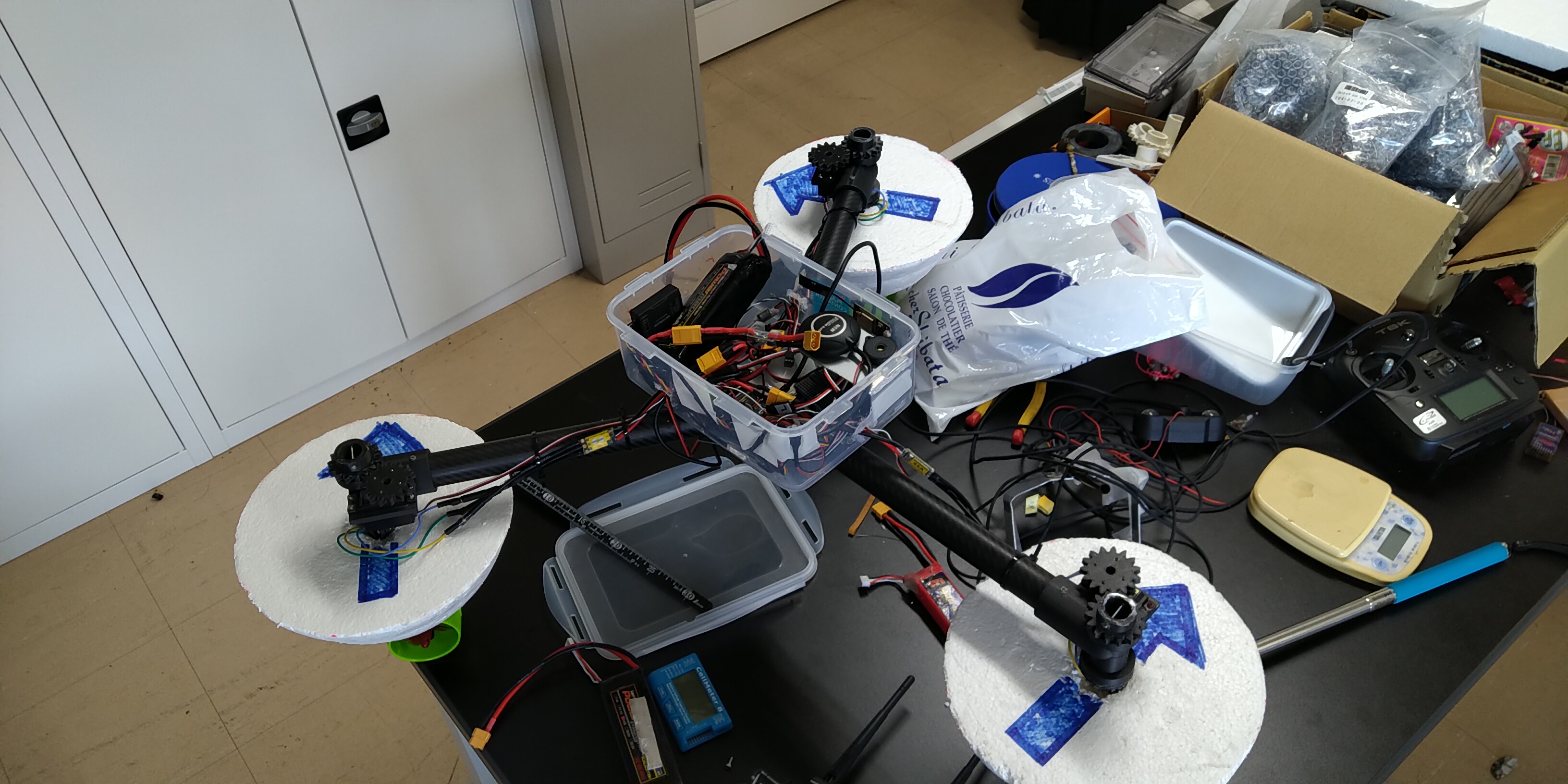
偏向3スラスタ水中ドローンの動作録画用棒つけた
偏向3スラスタ水中ドローンは、移動速度によってスラスタが偏向して最適化するように設計して、それっぽく動いているのですが、ちゃんと動作を録画するために、まずスラスタのフロートに矢印をはっきり書き入れ。

そして、棒をつけて上にアクションカメラを乗せました。

今日はここまで。
次回録画しながら自動航行してみます。
そして、棒をつけて上にアクションカメラを乗せました。

今日はここまで。
次回録画しながら自動航行してみます。

