スマートウォッチのバンドが切れた
バンドが切れました。

外すと周辺が汚い。

交換バンドを購入
[YFFSFDC] Redmi Smart Band 2 交換バンド 黒色 2個入り Xiaomi Band 8 Active 換えバンド シャオミ 小米 予備 替え バンド ベルト 交換用 ラバーベルト シリコン製 通気 防水
ちょっとゴムが堅いけどまあ使えます。

外すと周辺が汚い。

交換バンドを購入
[YFFSFDC] Redmi Smart Band 2 交換バンド 黒色 2個入り Xiaomi Band 8 Active 換えバンド シャオミ 小米 予備 替え バンド ベルト 交換用 ラバーベルト シリコン製 通気 防水
ちょっとゴムが堅いけどまあ使えます。


スマホのタッチ制御
スマホのタッチをマイコンで制御できるそうです。
画面にアルミ箔を貼って電極を付ける。電極は立てておいた方が良いようです。

あとは、USB端子のGNDと電極を接触させるとアルミ箔を貼った部分がタッチしたと認識されます。

ちなみにUSBのGNDはTypeA端子を覗き込んで一番左。

画面にアルミ箔を貼って電極を付ける。電極は立てておいた方が良いようです。
あとは、USB端子のGNDと電極を接触させるとアルミ箔を貼った部分がタッチしたと認識されます。
ちなみにUSBのGNDはTypeA端子を覗き込んで一番左。
ロウ付けにトライ
作ってるもので少し強度が必要な所に金属を接合した部品を使いたいので、ロウ付けをやってみました。

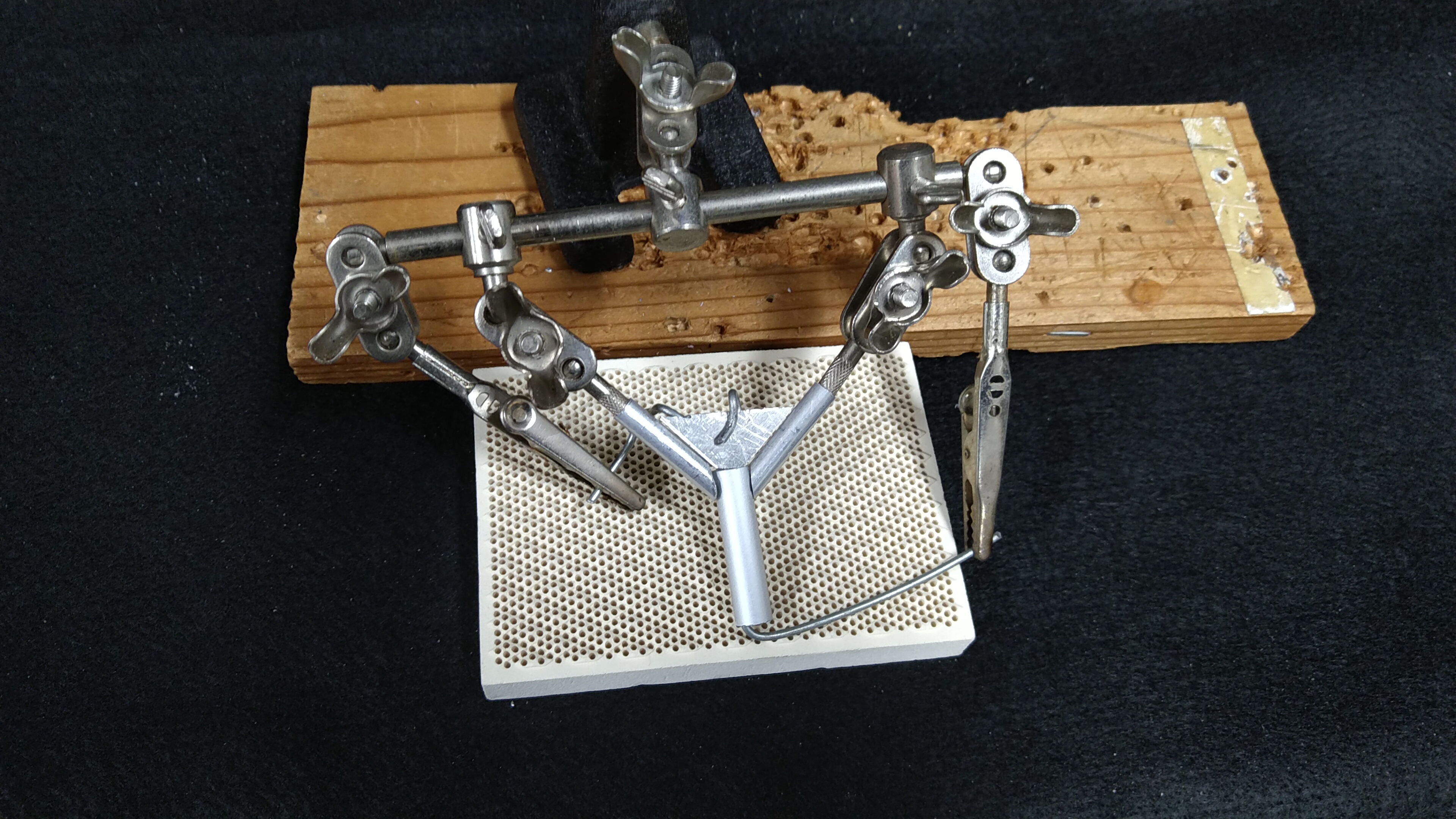
最初にアルミのロウ付けを試すも失敗。こんな風に部品を固定してからやってみましたが、ロウ材を溶かすときに少し押さえて塗り塗りするときにばらけて収集がつかなくなり、最後にはパイプがドロッと溶けて終わり。
いきなりアルミは難しすぎました。

次に真鍮のロウ付け。
これは適当に部材を固定して、フラックスを塗って、バーナーであぶって、温度といいタイミングでロウ材を流し込むと上手くいきました。

こんな感じ。

固定方法も、耐熱セラミックボードの穴にピアノ線を切ったものを差し込んでやると細かな部品は止められます。

最後に、アルミのロウ付けを再度トライ。
試行錯誤した挙句、そこそこできるようになってきました。
まず、熱容量が大きく違う部材同士をつけるのは難しい。
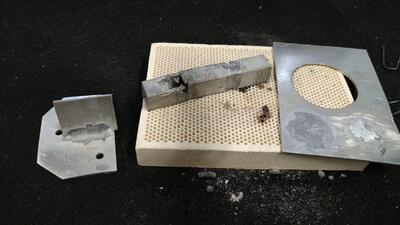
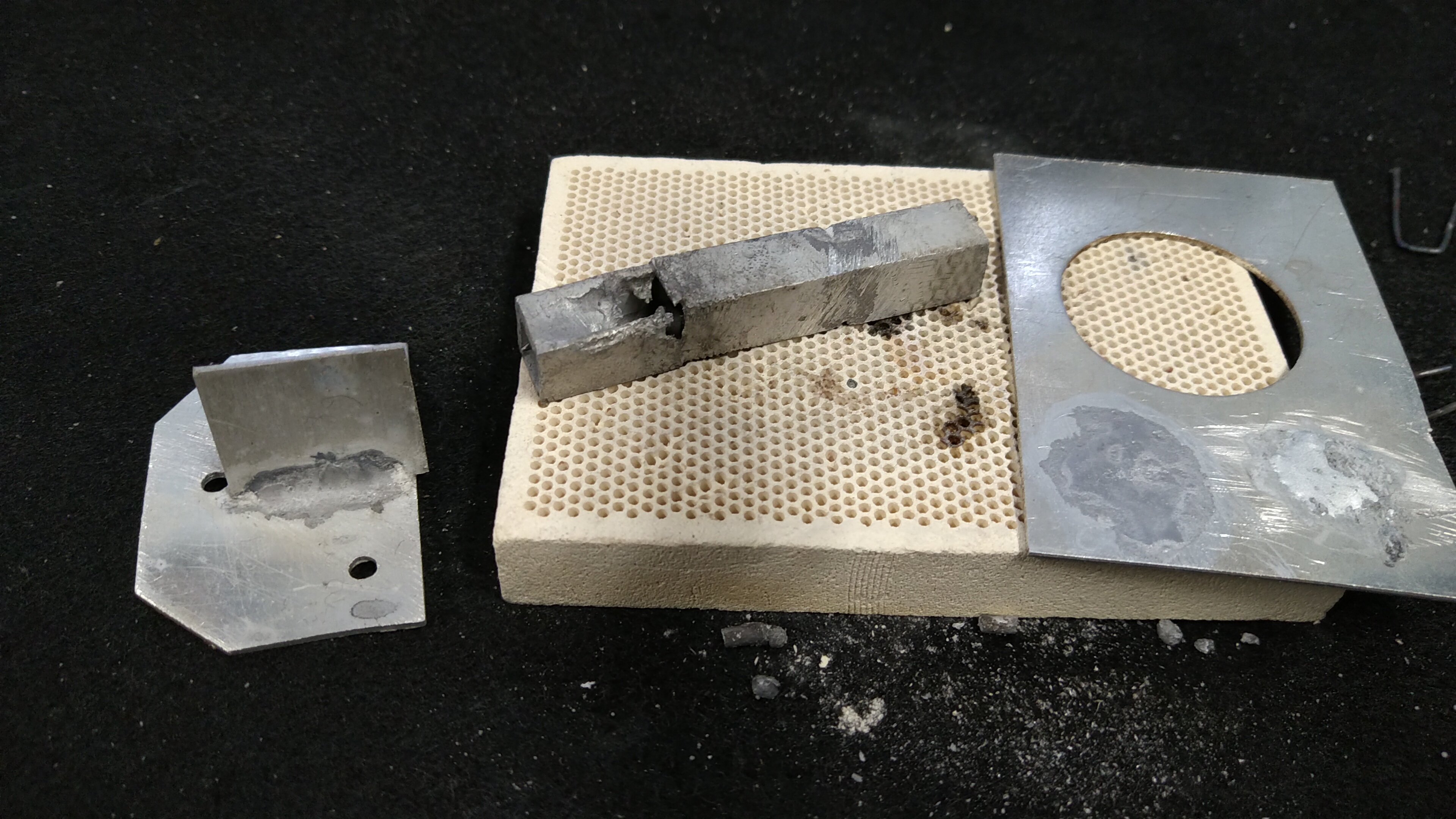
写真の左、板をT字で付けるのは何度かやってできました。
写真の中ほど、角パイプを2か所切ってロウ付けしてます。強度は元と同じくらいあります。
写真右は、ロウ付けのロウ材の融け具合をたしかめたところ、硬ロウはサラサラに広がります。アルミソルダーは少し低温で溶けますが比較的広がりにくい。使い分けですね。
最初にアルミのロウ付けを試すも失敗。こんな風に部品を固定してからやってみましたが、ロウ材を溶かすときに少し押さえて塗り塗りするときにばらけて収集がつかなくなり、最後にはパイプがドロッと溶けて終わり。
いきなりアルミは難しすぎました。
次に真鍮のロウ付け。
これは適当に部材を固定して、フラックスを塗って、バーナーであぶって、温度といいタイミングでロウ材を流し込むと上手くいきました。
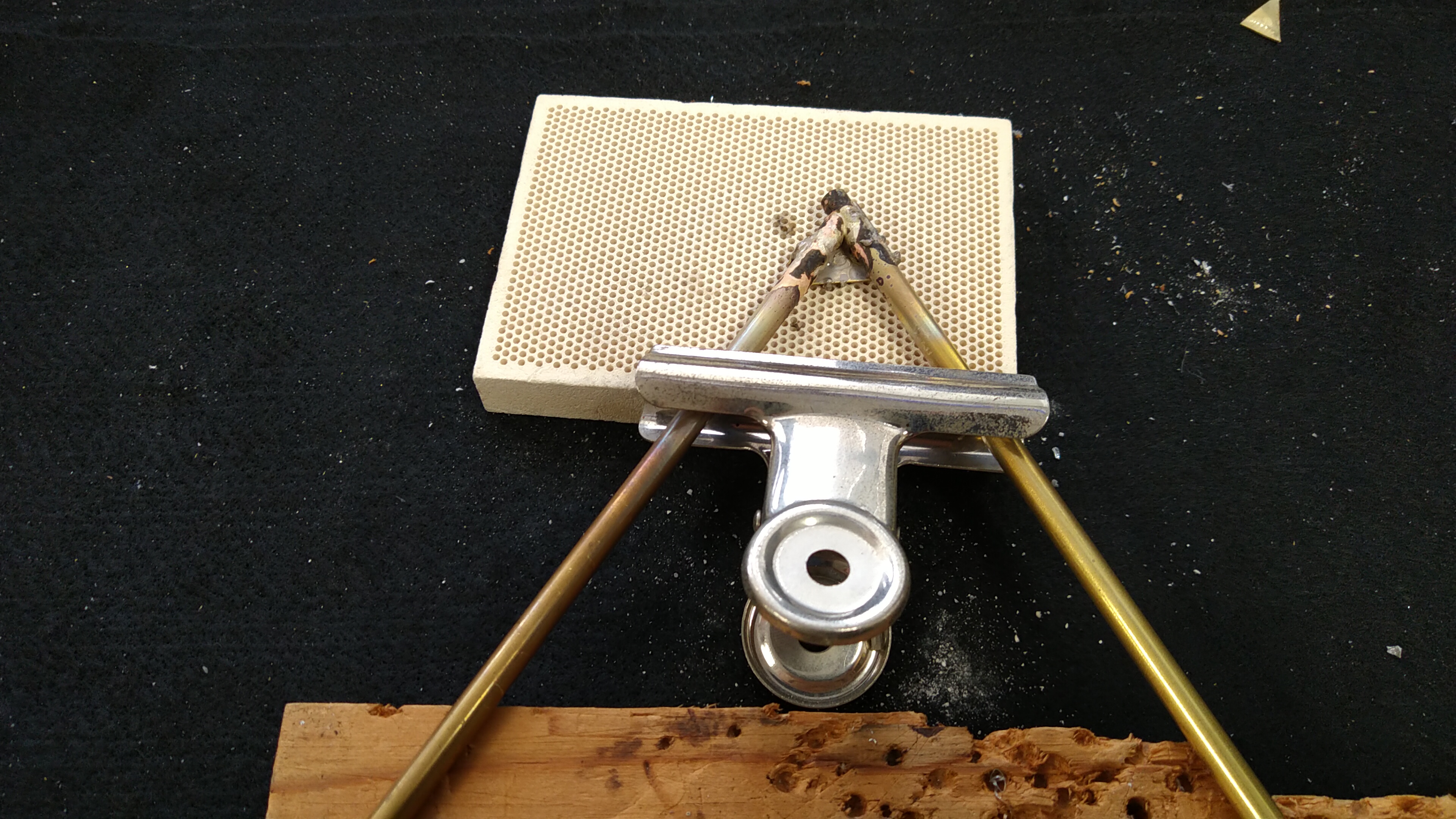
こんな感じ。

固定方法も、耐熱セラミックボードの穴にピアノ線を切ったものを差し込んでやると細かな部品は止められます。

最後に、アルミのロウ付けを再度トライ。
試行錯誤した挙句、そこそこできるようになってきました。
まず、熱容量が大きく違う部材同士をつけるのは難しい。
写真の左、板をT字で付けるのは何度かやってできました。
写真の中ほど、角パイプを2か所切ってロウ付けしてます。強度は元と同じくらいあります。
写真右は、ロウ付けのロウ材の融け具合をたしかめたところ、硬ロウはサラサラに広がります。アルミソルダーは少し低温で溶けますが比較的広がりにくい。使い分けですね。
水中カメラ、その2
あれこれ探して見つけたのがこれ。
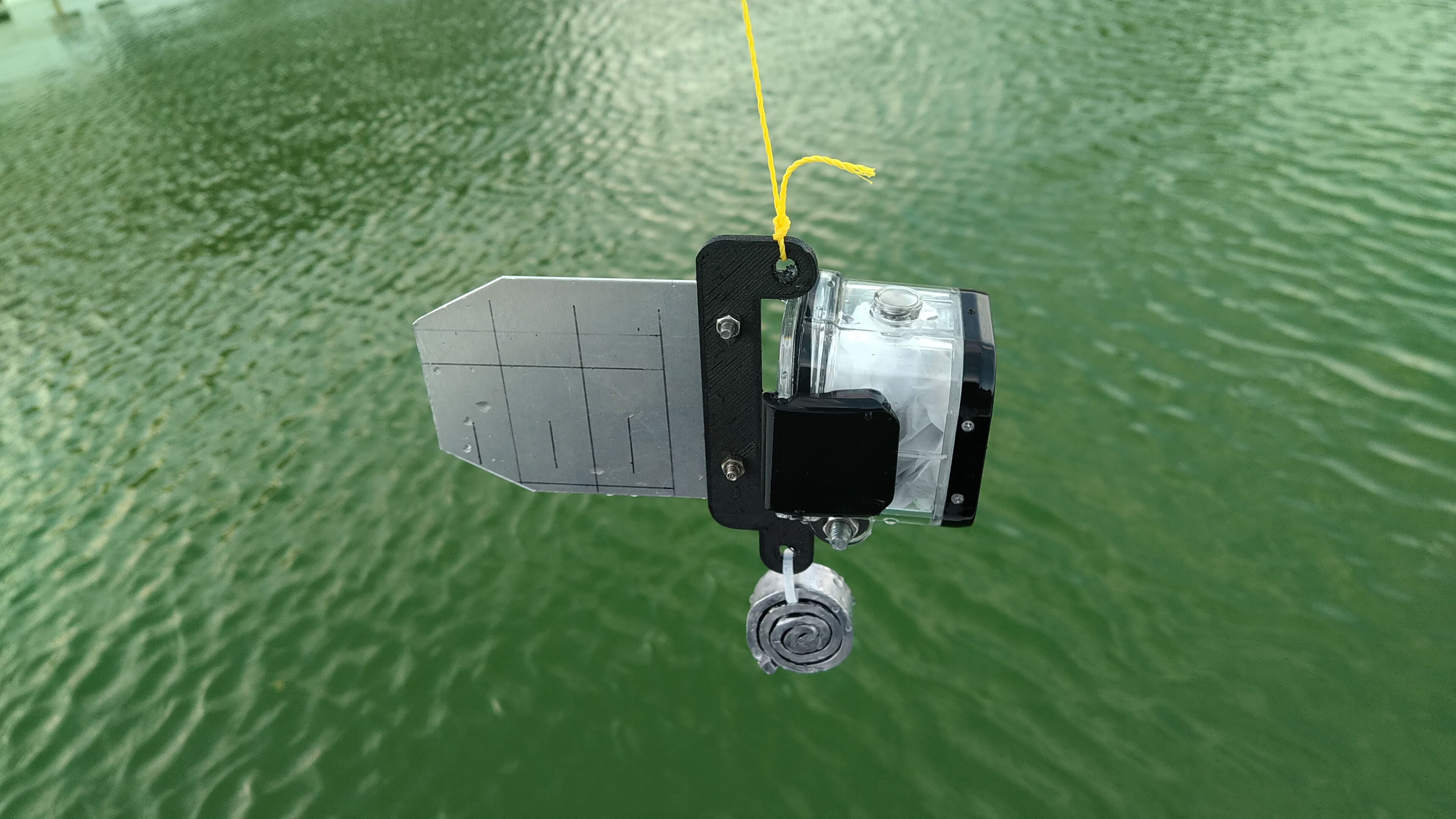
GoPro Hero 5 session の防水ケース。
本体のみでも防水機能があるのですが、もっと深く沈めても大丈夫なケースです。

これを水中にぶら下げる用のアタッチメントを設計して3Dプリンタで出力。

前向きと下向きに調整できます。

水中で動かして前を向くようにフィンを取り付けました。
2穴でねじ止めするようにしてるのでフィンの形状、サイズは後でいろいろ試せます。

とりあえずこれで水中に沈めて引っ張ってみました。
いい感じで前を向いて進んでくれますので、これでOKです。

あとは配線を乗せ換えてシール。
GoPro Hero 5 session の防水ケース。
本体のみでも防水機能があるのですが、もっと深く沈めても大丈夫なケースです。

これを水中にぶら下げる用のアタッチメントを設計して3Dプリンタで出力。

前向きと下向きに調整できます。

水中で動かして前を向くようにフィンを取り付けました。
2穴でねじ止めするようにしてるのでフィンの形状、サイズは後でいろいろ試せます。
とりあえずこれで水中に沈めて引っ張ってみました。
いい感じで前を向いて進んでくれますので、これでOKです。

あとは配線を乗せ換えてシール。
水中カメラについて、その1
水上ドローンに搭載する水中カメラについてです。
画像伝送できる送受信機 Skydriond T12 専用の小型カメラを購入して、
GoPro3,4あたりの互換の防水ケースに収納し、重りで浮力を調整して沈むようにして、赤外LED照明まで中に入れました。

連続回転サーボで水中を上下できるようにしています。

しかし、水中に沈めて引っ張ってみると、非対称な形状からか前を向きません。斜め横を向いたまま引っ張られてます。これじゃあ動画を見てても何が何だか分からないので改良が必要です。
画像伝送できる送受信機 Skydriond T12 専用の小型カメラを購入して、
GoPro3,4あたりの互換の防水ケースに収納し、重りで浮力を調整して沈むようにして、赤外LED照明まで中に入れました。

連続回転サーボで水中を上下できるようにしています。

しかし、水中に沈めて引っ張ってみると、非対称な形状からか前を向きません。斜め横を向いたまま引っ張られてます。これじゃあ動画を見てても何が何だか分からないので改良が必要です。

