Skydroid T12で水上ドローンのスラスト制御量の計算
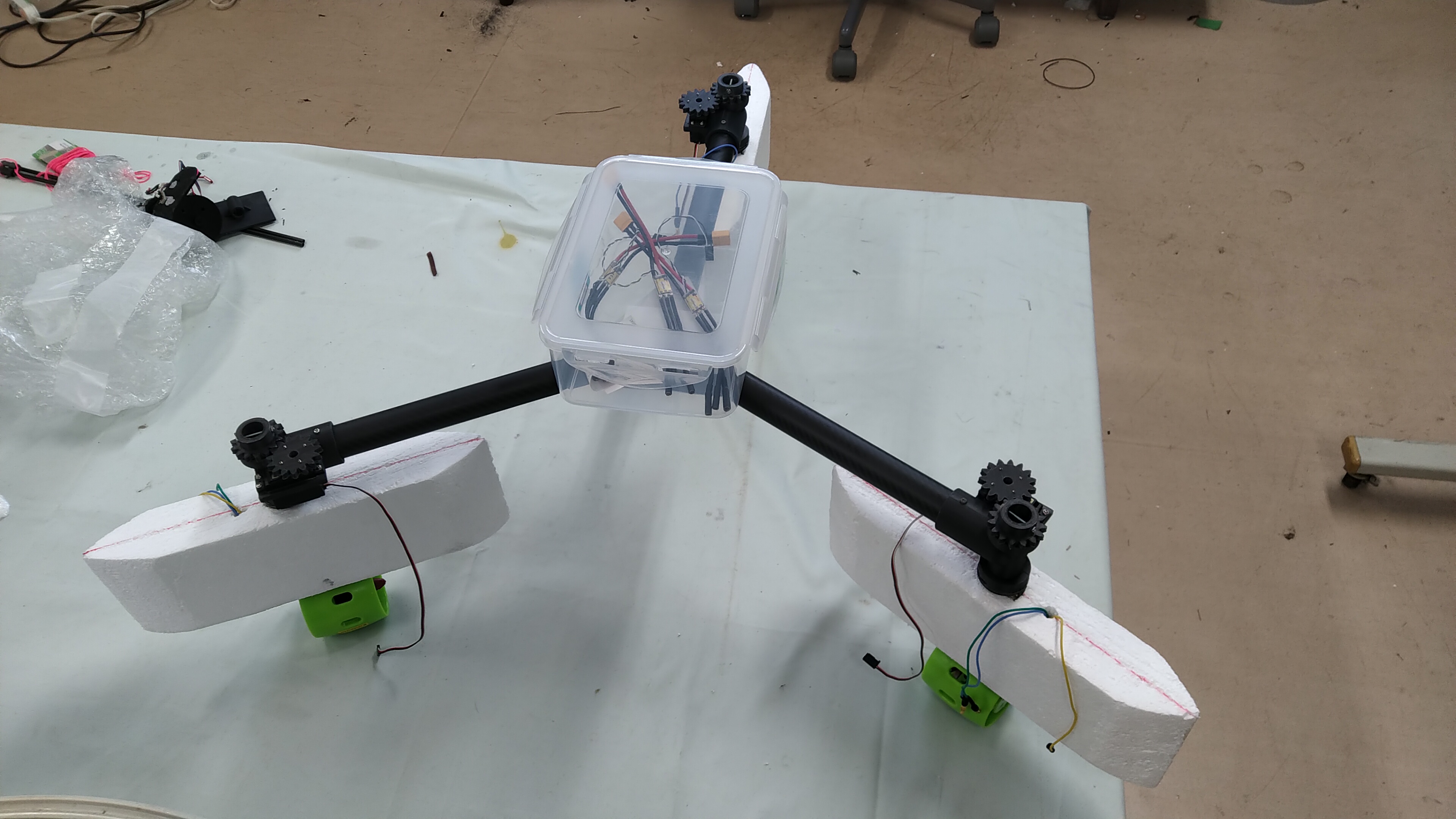
今考えている水上ドローンはこんな感じで、3つのスラストの方向を変えて動くもの。

とりあえず、スラストが120度ずつで外側を向いてプロポのスティックを動かしたときに、動かした方向に応じてスラストが変化するのを考えました。
中心が0、最大値が0.5として、スティックを前に傾けると、右モータ(motorR)、左モータ(motorL)が0.25、テールモータ(motorT)が-0.5になるように、スティックの制御量を3方向に分配します。
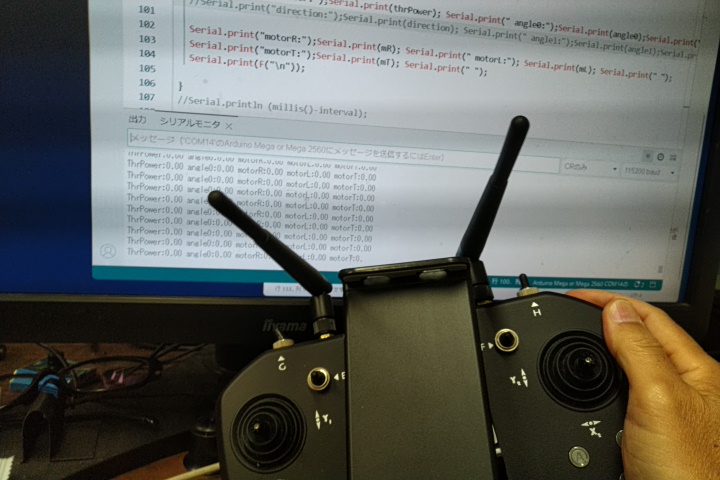
スティックの上下左右で二乗平均して中心からの制御量とatan2関数で角度を出して、3方向との差のコサインを計算するプログラムで問題いようです。

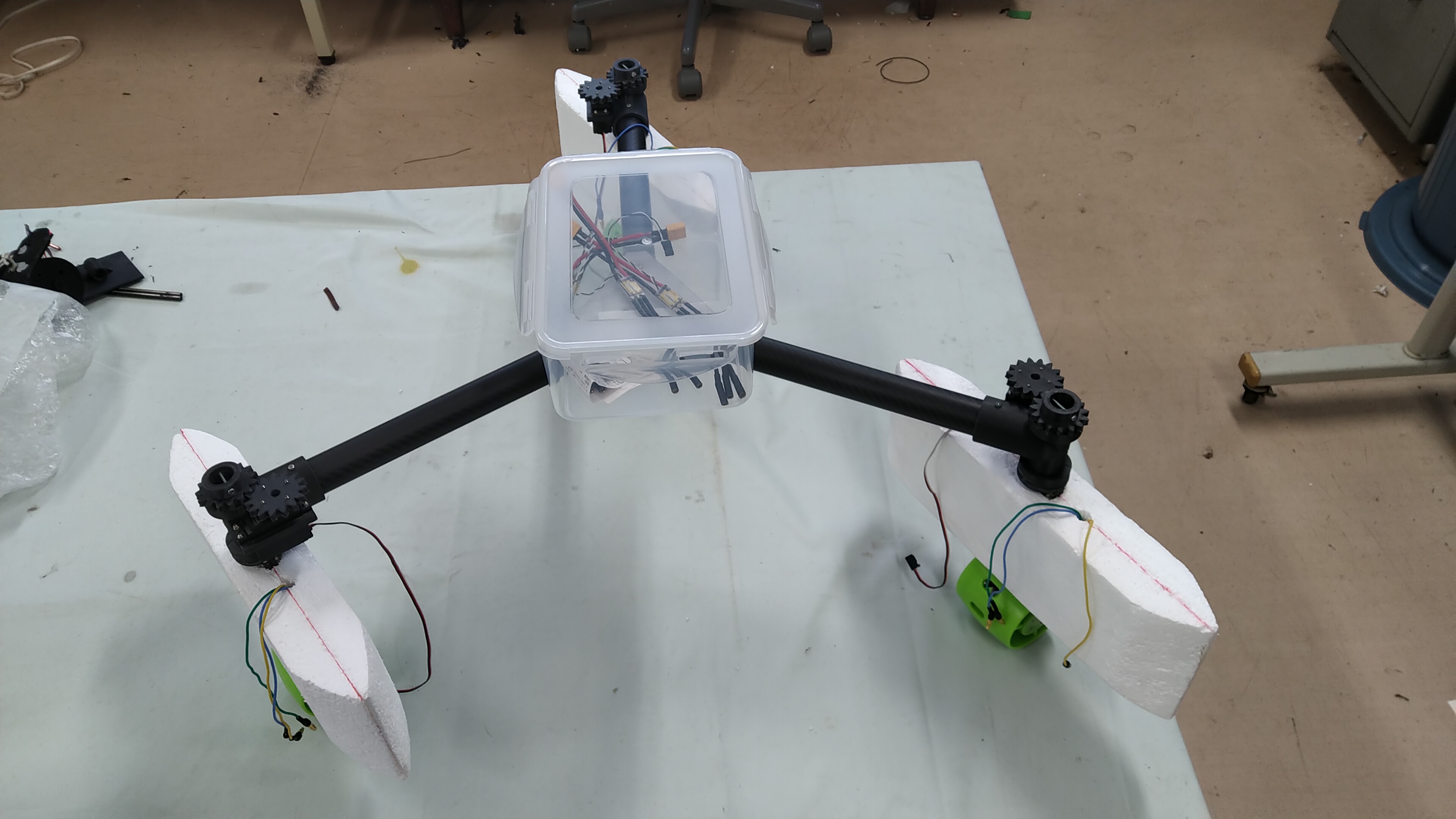
実際には、前に進むときは、下の写真のようにスラストをサーボで進行方向に向ける制御を同時に入れたいです。

斜めに行くときも斜めにスラストを傾けるように制御。

ということで次は角度を計算するプログラム作成。
動画はこちら。
amazonで購入→ 水中スラスター
とりあえず、スラストが120度ずつで外側を向いてプロポのスティックを動かしたときに、動かした方向に応じてスラストが変化するのを考えました。
中心が0、最大値が0.5として、スティックを前に傾けると、右モータ(motorR)、左モータ(motorL)が0.25、テールモータ(motorT)が-0.5になるように、スティックの制御量を3方向に分配します。
スティックの上下左右で二乗平均して中心からの制御量とatan2関数で角度を出して、3方向との差のコサインを計算するプログラムで問題いようです。
実際には、前に進むときは、下の写真のようにスラストをサーボで進行方向に向ける制御を同時に入れたいです。

斜めに行くときも斜めにスラストを傾けるように制御。
ということで次は角度を計算するプログラム作成。
動画はこちら。
amazonで購入→ 水中スラスター



