Arduino Nano Everyを使ったロボトレーサ(ライントレースロボット)の製作 その5
完成したからと言って、いきなり電池入れるわけではありません。
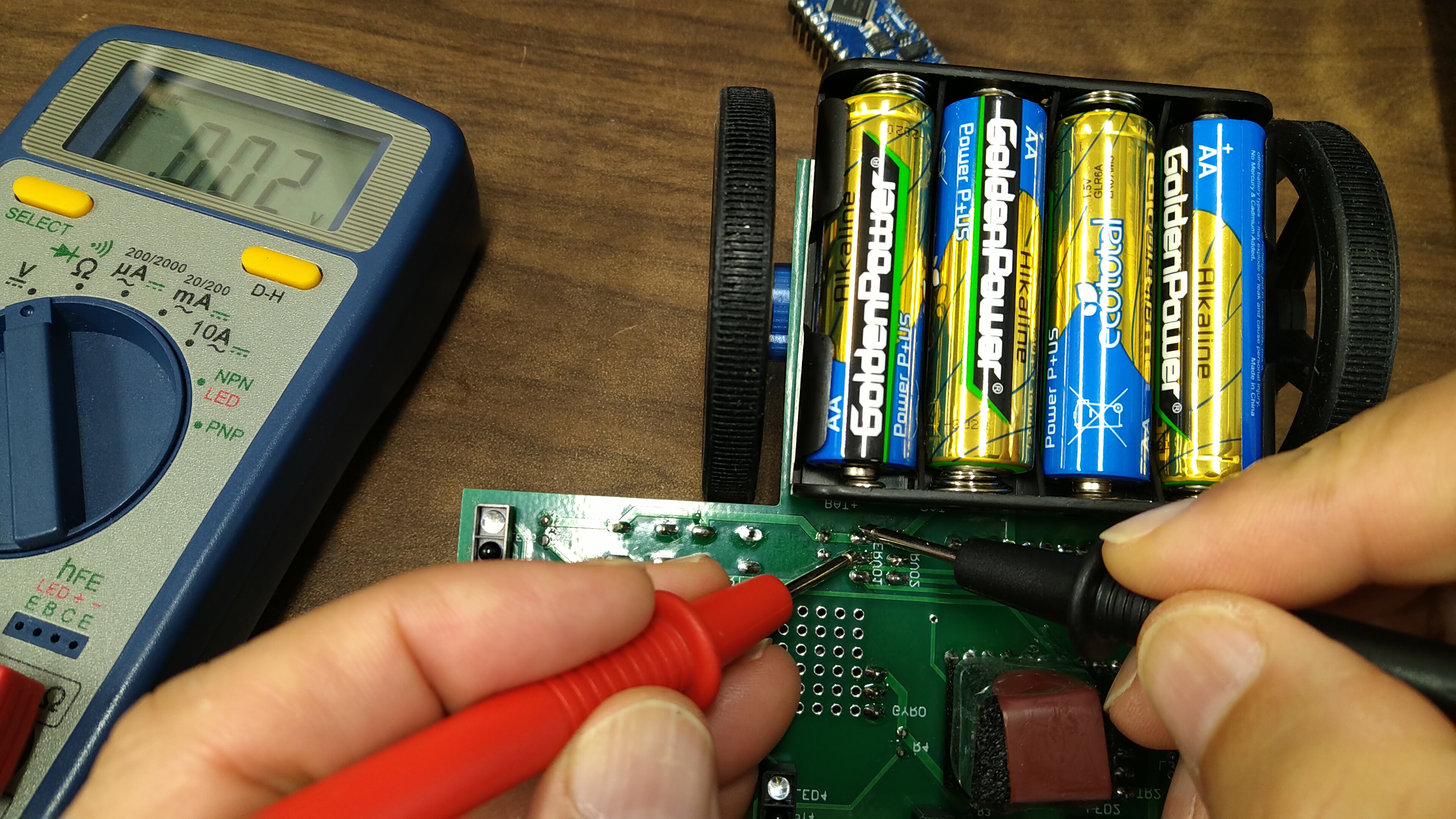
基板の間違いやハンダ付けのミスがないかを確認。マイコンボードやサーボモータなど外せるものは外して、テスターで導通チェック。特に電源回りでショートしたりしてたら大変です。

問題なければ、次は電池を入れて必要な所に電源が供給されてるかの確認。サーボの電源部分と、マイコンのVinの供給部分。

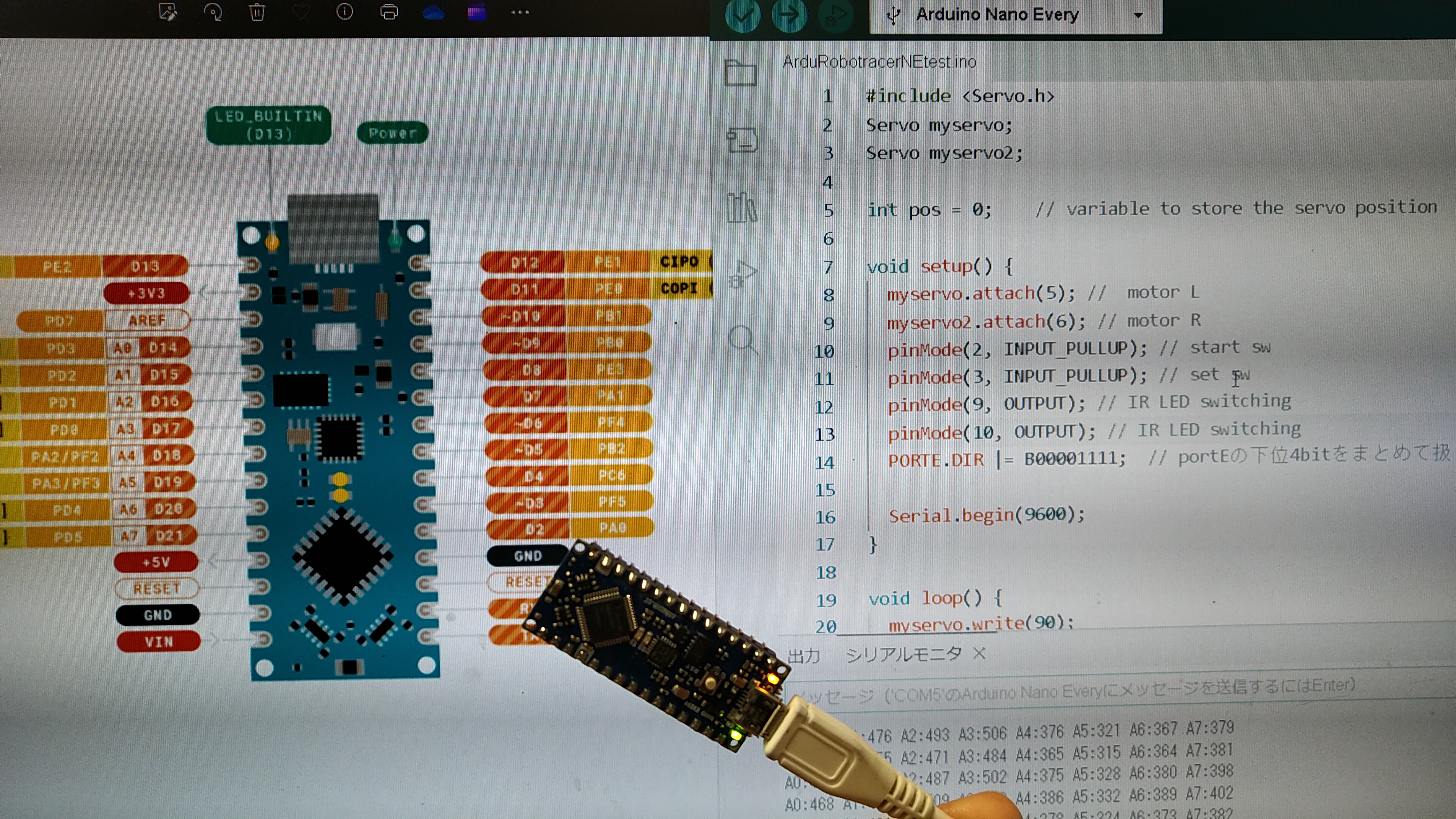
マイコンを刺す前に、テストプログラムを作成。回路とマイコンの動作が合ってないと、マイコンにダメージを与えたり、逆に回路を壊したりする可能性は十分あります。入力端子は入力設定に、出力端子は出力設定に。
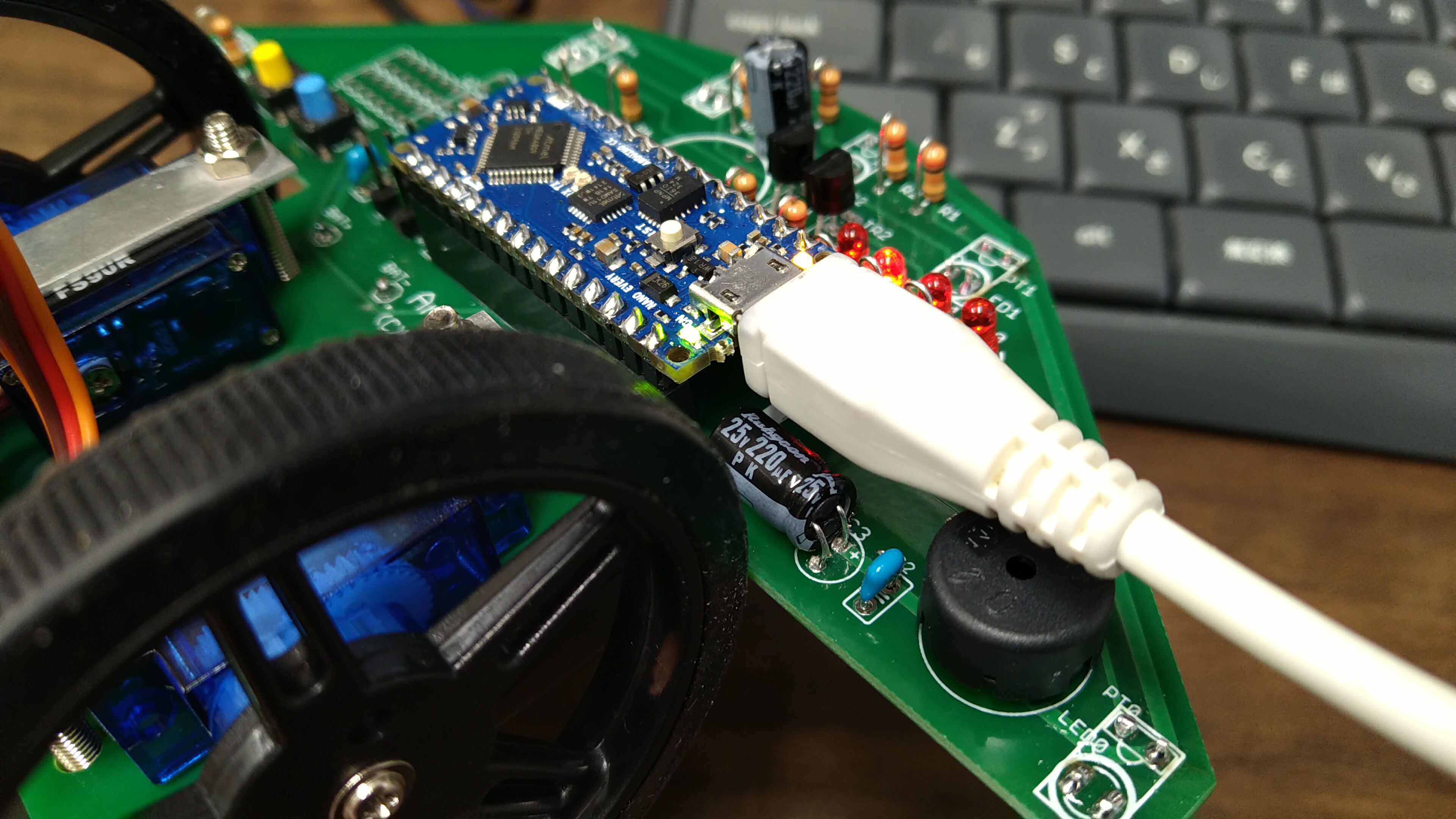
そこまでやってから、ボードをロボットに装着して、ケーブルを刺す...ことができませんでした。ケーブルのコネクタと基板の電解コンデンサの干渉を心配して可能な限り離したんですがわずかに干渉してます。

違うケーブルだとOK.

でも、ケーブルによって使えたり使えなかったりするのは後々面倒なので、電解コンデンサは倒して取り付けることにしました。これは想定内で倒すだけの距離は開けて設計してあります。

次はいよいよロボットを動かします。
基板の間違いやハンダ付けのミスがないかを確認。マイコンボードやサーボモータなど外せるものは外して、テスターで導通チェック。特に電源回りでショートしたりしてたら大変です。

問題なければ、次は電池を入れて必要な所に電源が供給されてるかの確認。サーボの電源部分と、マイコンのVinの供給部分。
マイコンを刺す前に、テストプログラムを作成。回路とマイコンの動作が合ってないと、マイコンにダメージを与えたり、逆に回路を壊したりする可能性は十分あります。入力端子は入力設定に、出力端子は出力設定に。
そこまでやってから、ボードをロボットに装着して、ケーブルを刺す...ことができませんでした。ケーブルのコネクタと基板の電解コンデンサの干渉を心配して可能な限り離したんですがわずかに干渉してます。

違うケーブルだとOK.
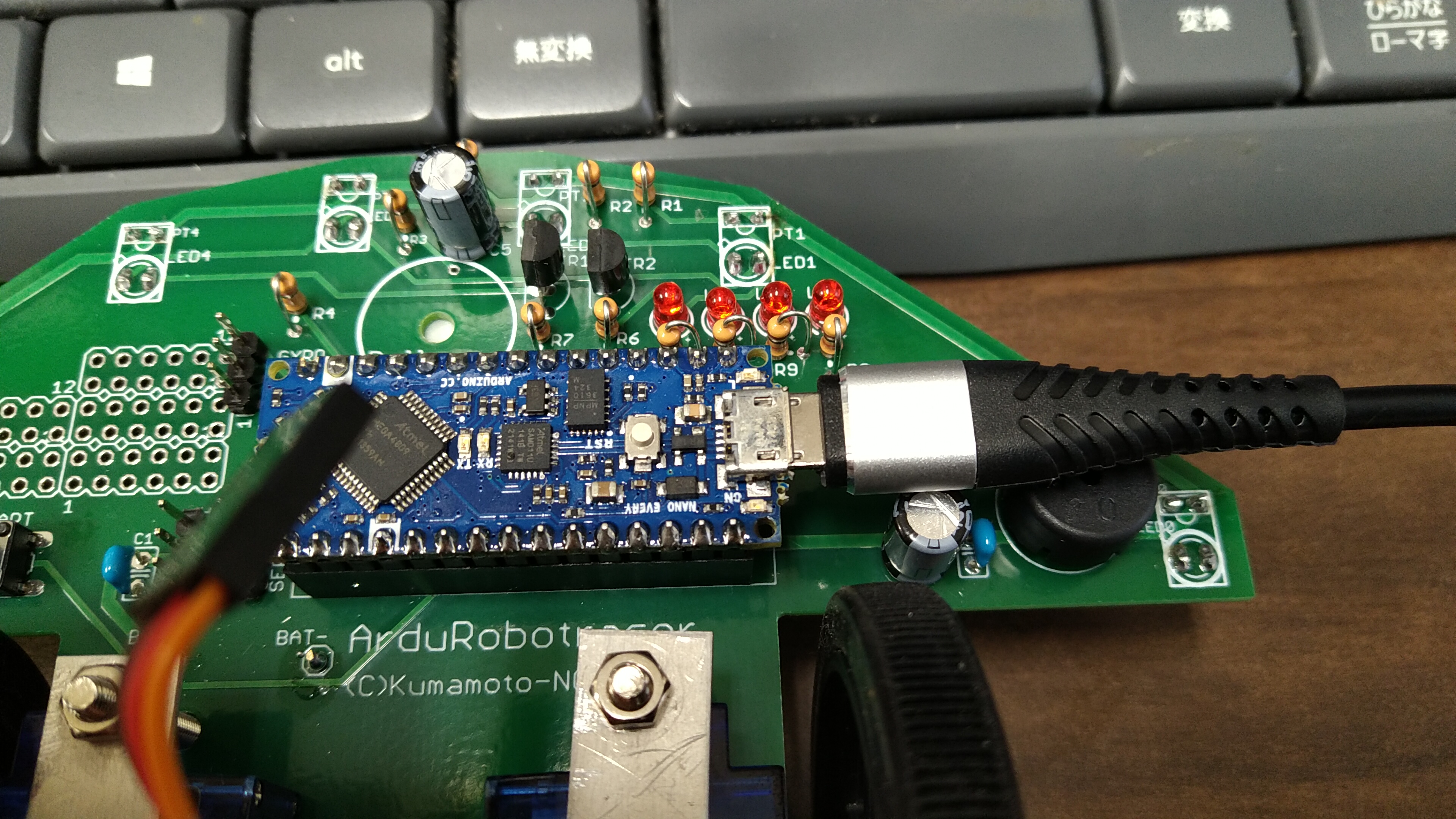
でも、ケーブルによって使えたり使えなかったりするのは後々面倒なので、電解コンデンサは倒して取り付けることにしました。これは想定内で倒すだけの距離は開けて設計してあります。
次はいよいよロボットを動かします。



コメント一覧
コメント投稿

