Arduino Nano Everyを使ったロボトレーサ(ライントレースロボット)の製作 その4
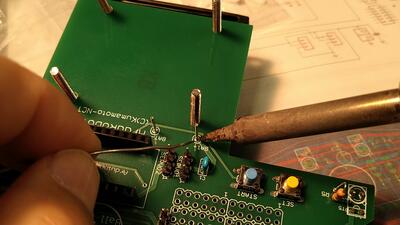
これからハンダ付けします。
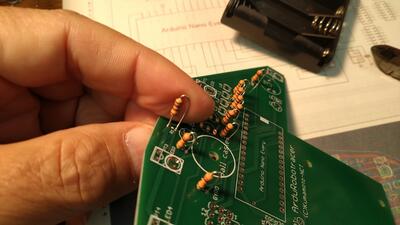
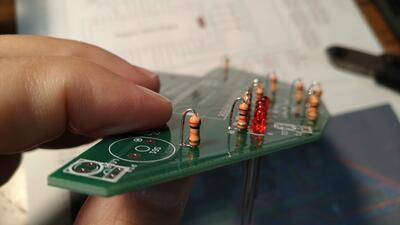
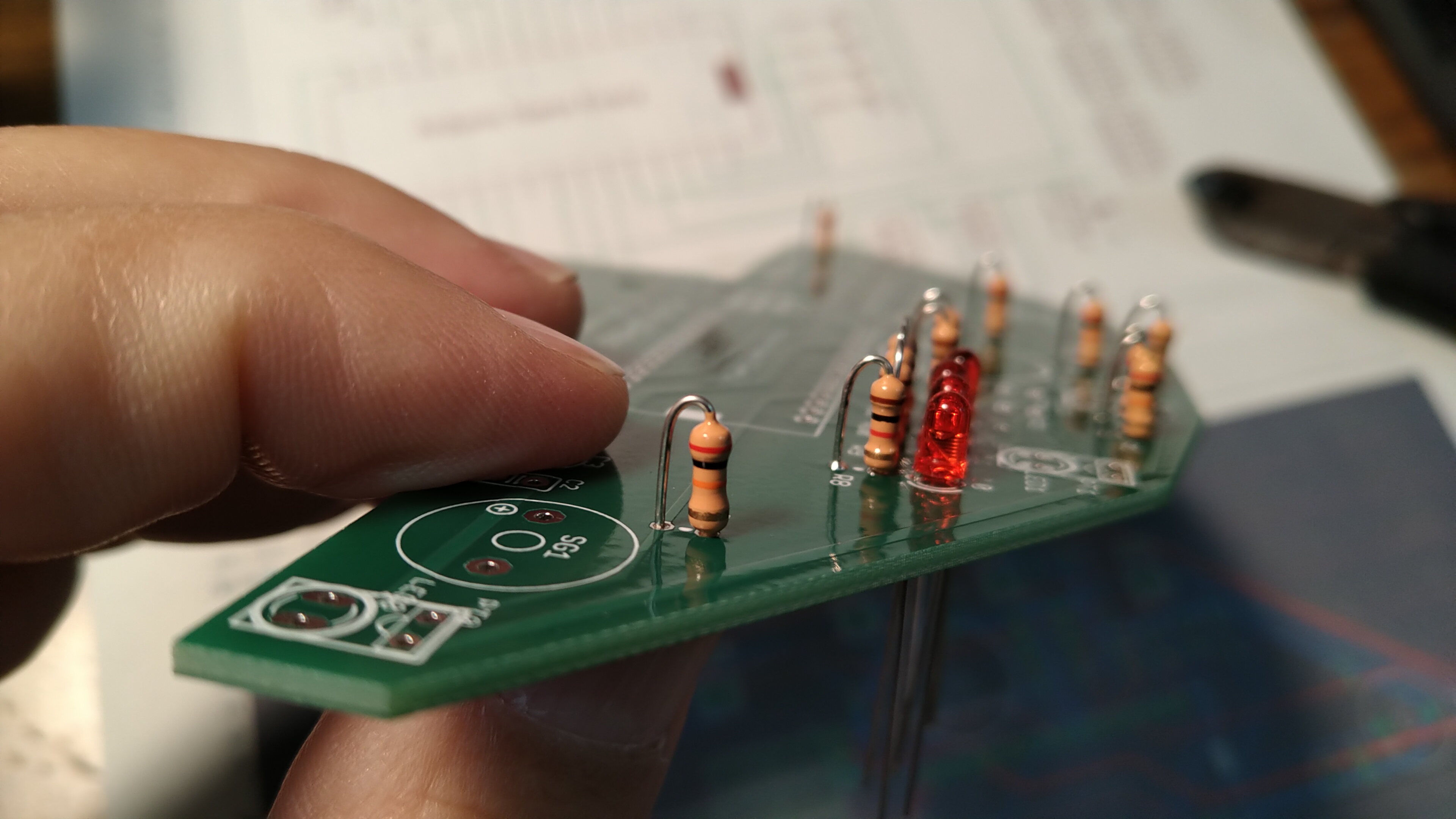
1kΩの抵抗をまずハンダ付け。LEDの電流制限と、トランジスタのベース抵抗。
低い部品、熱に強い部品、組み立て順序を考えて後からつける部品の邪魔にならないものからハンダ付けしていきます。
次はフォトトランジスタのエミッタ負荷の20kΩの抵抗のハンダ付け。ゆっくり走るロボットなので、ラインの読み取り感度優先で抵抗値は大きめです。大きいとレスポンスが遅くなります。高速走行を目指すならこの抵抗は1kΩ程度が良いですが感度が下がるのでラインに近づけるとかライン照射の赤外LEDの光量アップとか考えないといけません。
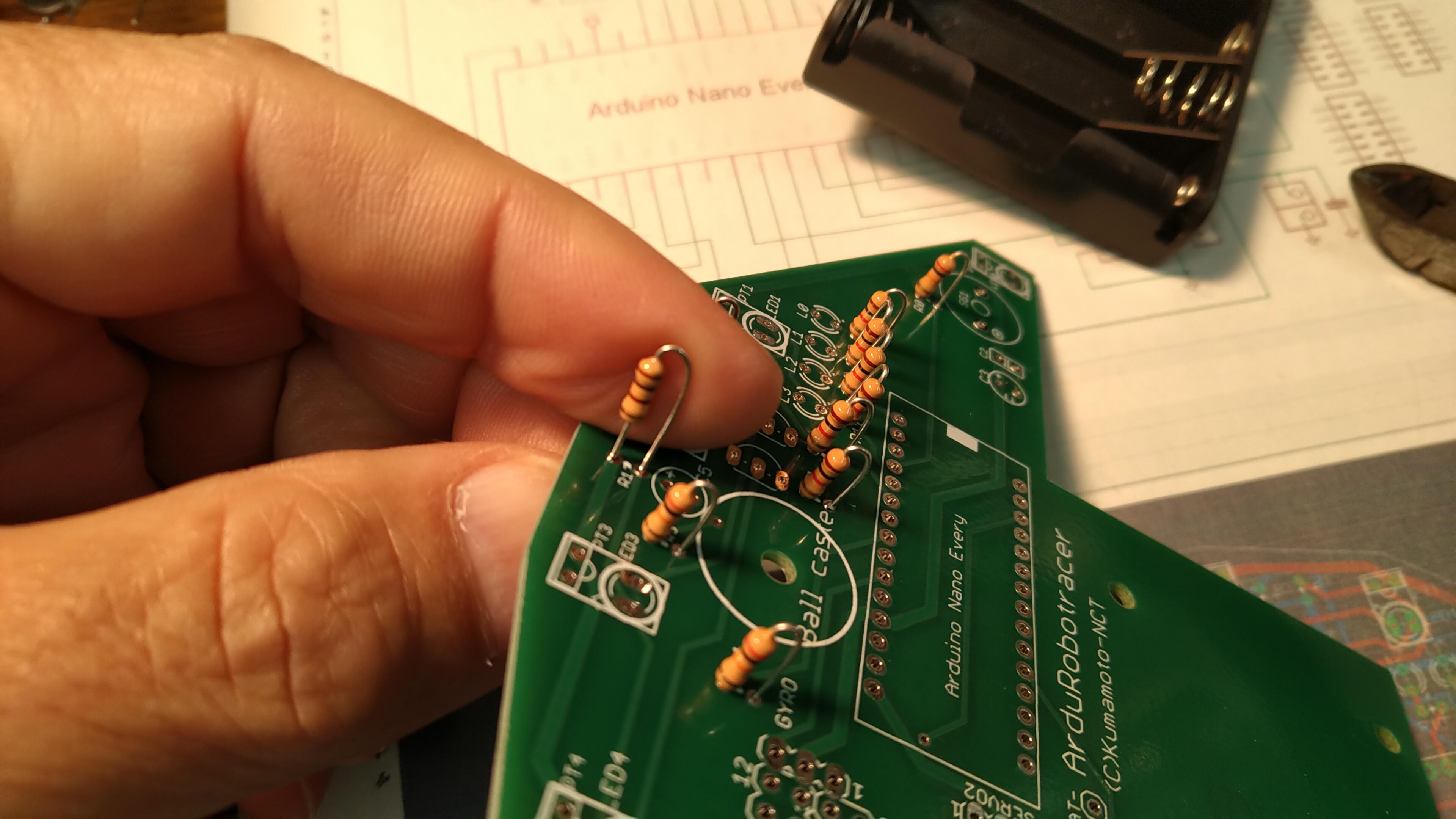
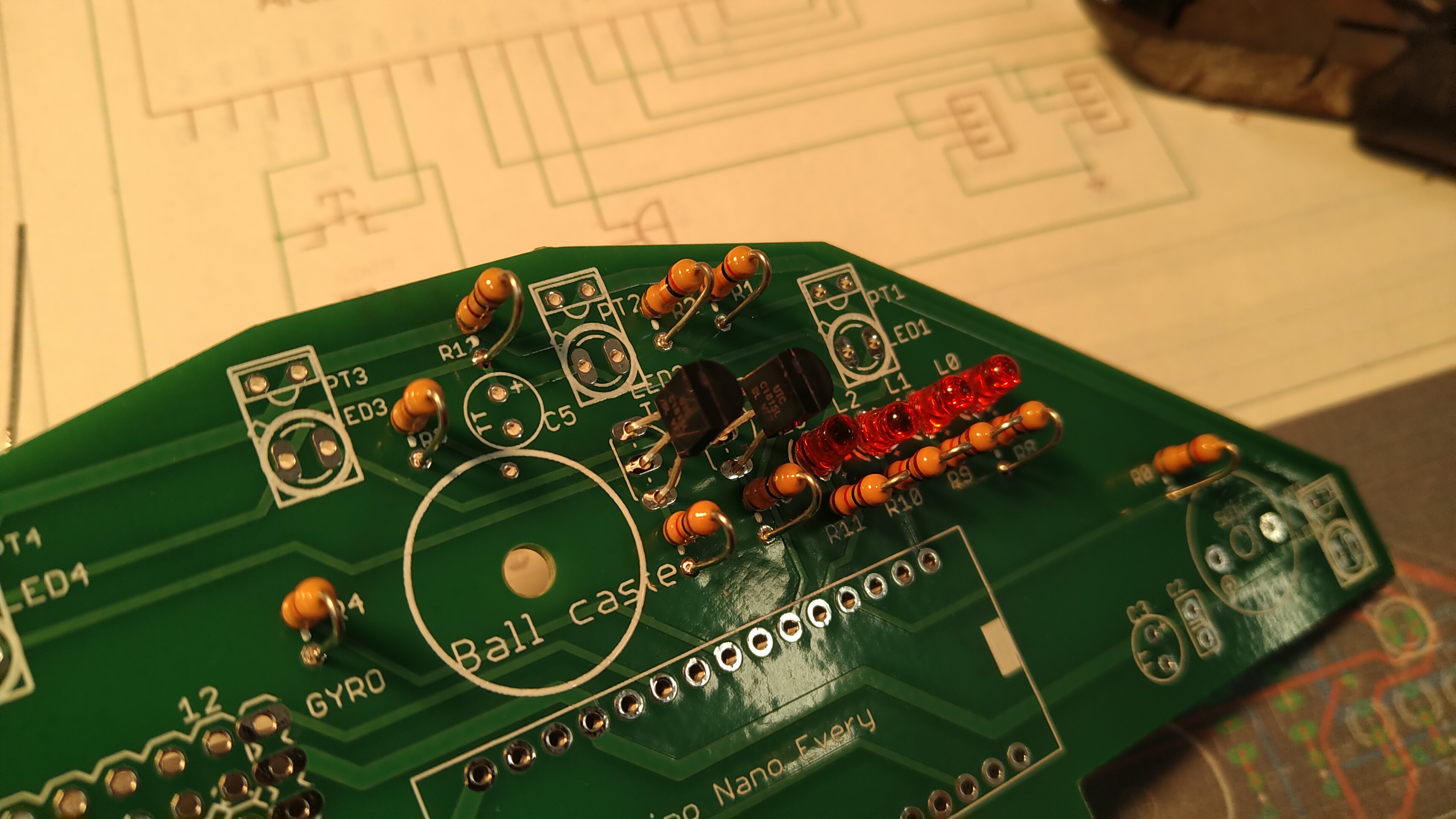
100Ωの抵抗をハンダ付け。これは電解コンデンサの充電用途と赤外LEDの電流制限の両方を兼ねています。
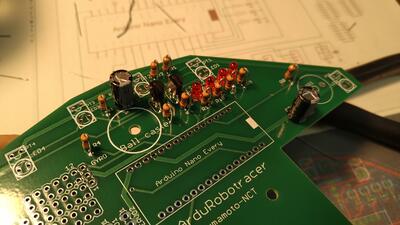
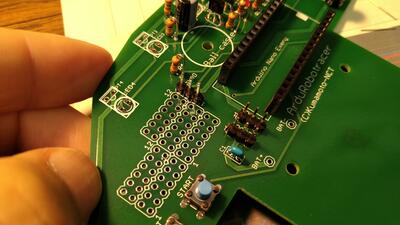
次に標示用LEDを4本取り付け、極性があるので、足の長い方が抵抗側になるように。
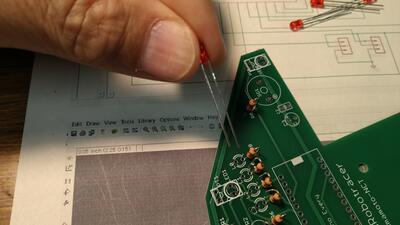
LEDは少し浮かせてつけた方が良いです。ぴったりつけると熱ストレスで足が引っ張られて故障の原因になります。
次は、トランジスタ2個。2SC1815相当をハンダ付け。赤外LEDのスイッチングに使います。
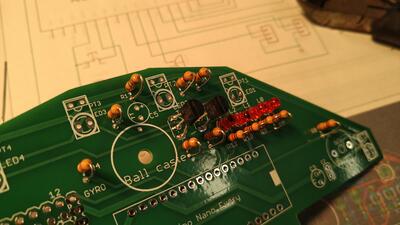
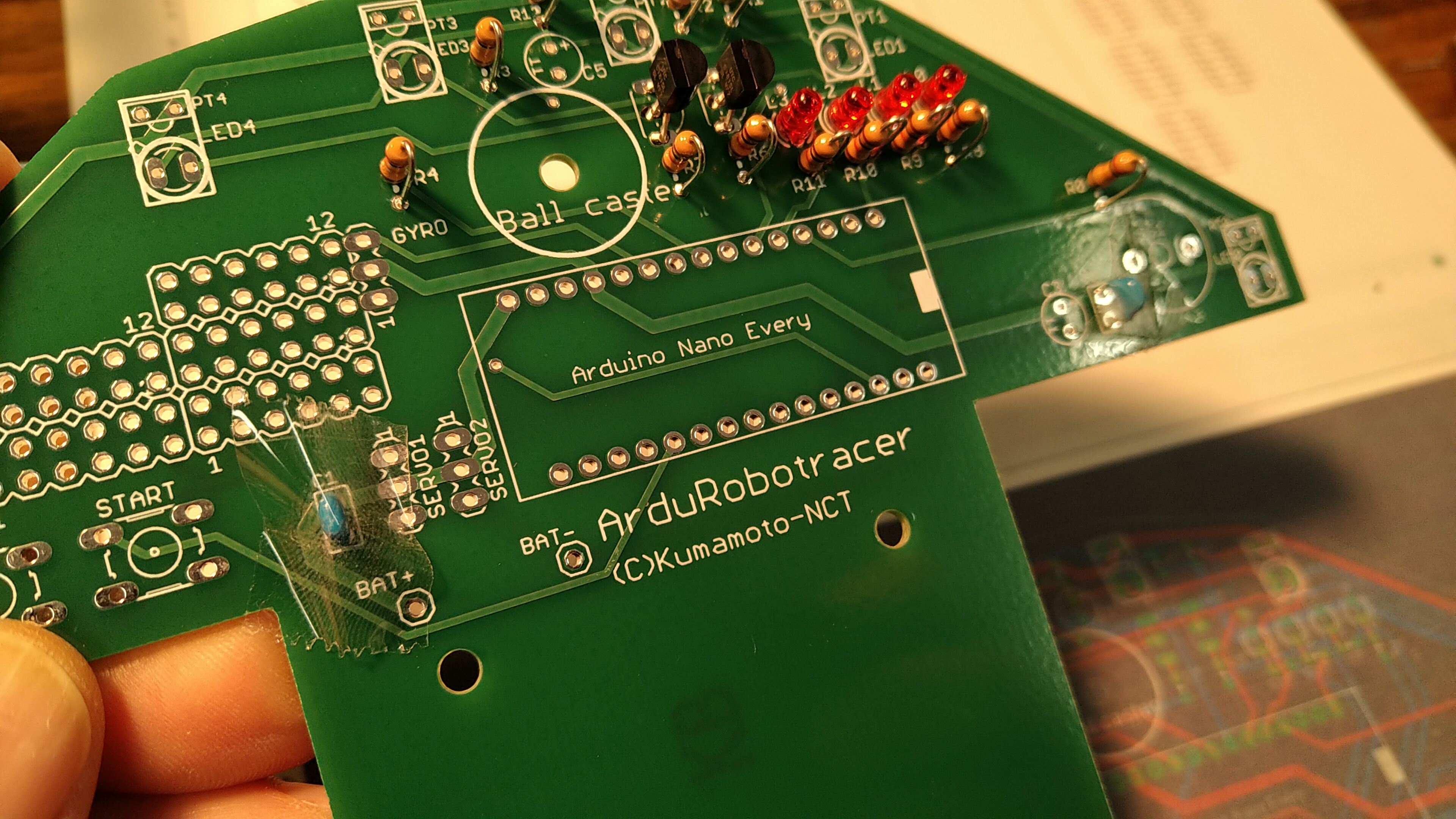
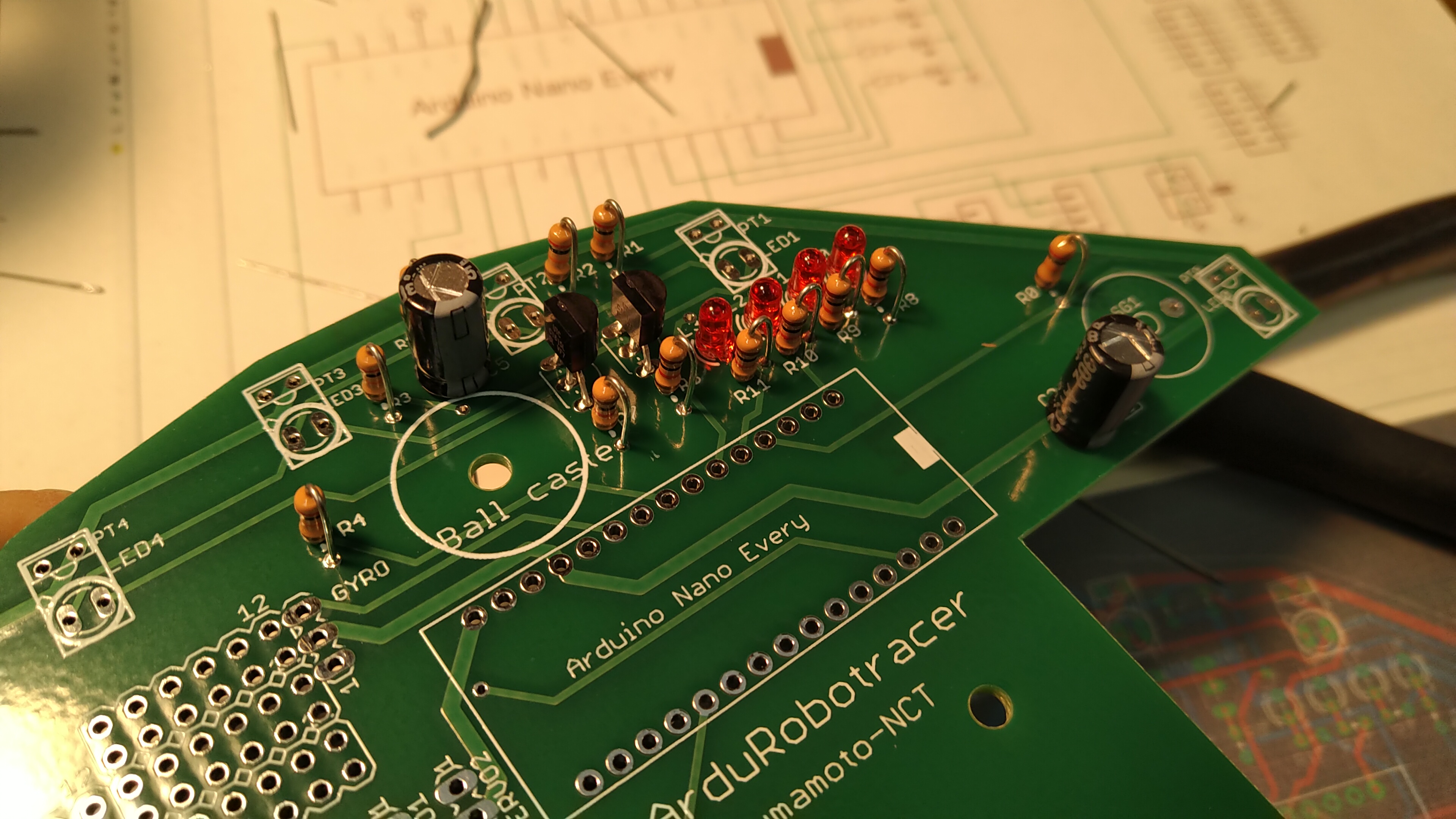
積層セラミックキャパシタを2か所ハンダ付け。IC1個に1個が基本ですが、電源近くとサーボモータの近くに1個ずつ。マイコンボード上にもコンデンサは乗ってるので保険みたいなものかも。背が低くて抜けやすい部品だったのでいったんセロハンテープで仮止めしてハンダ付け。
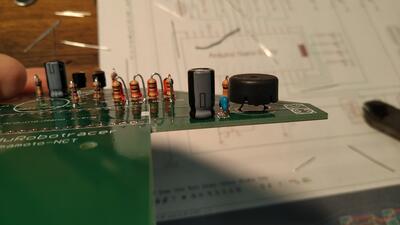
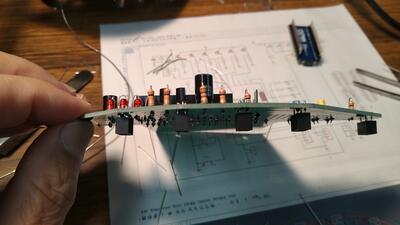
次は電解コンデンサを2個。だんだん背が高くなってきます。電解液が入ってるので熱には弱いのでちょっと気にして最後の方でハンダ付け。電源のところと、赤外LED点灯の電流源として使います。
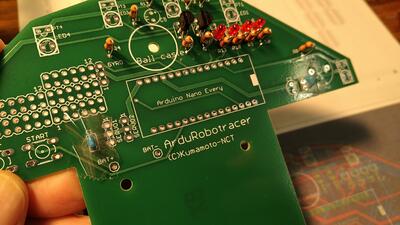
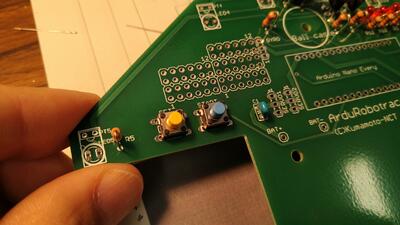
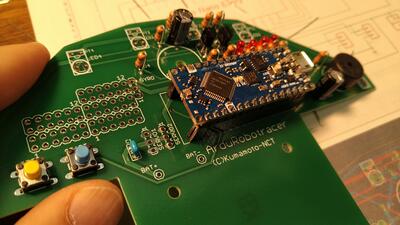
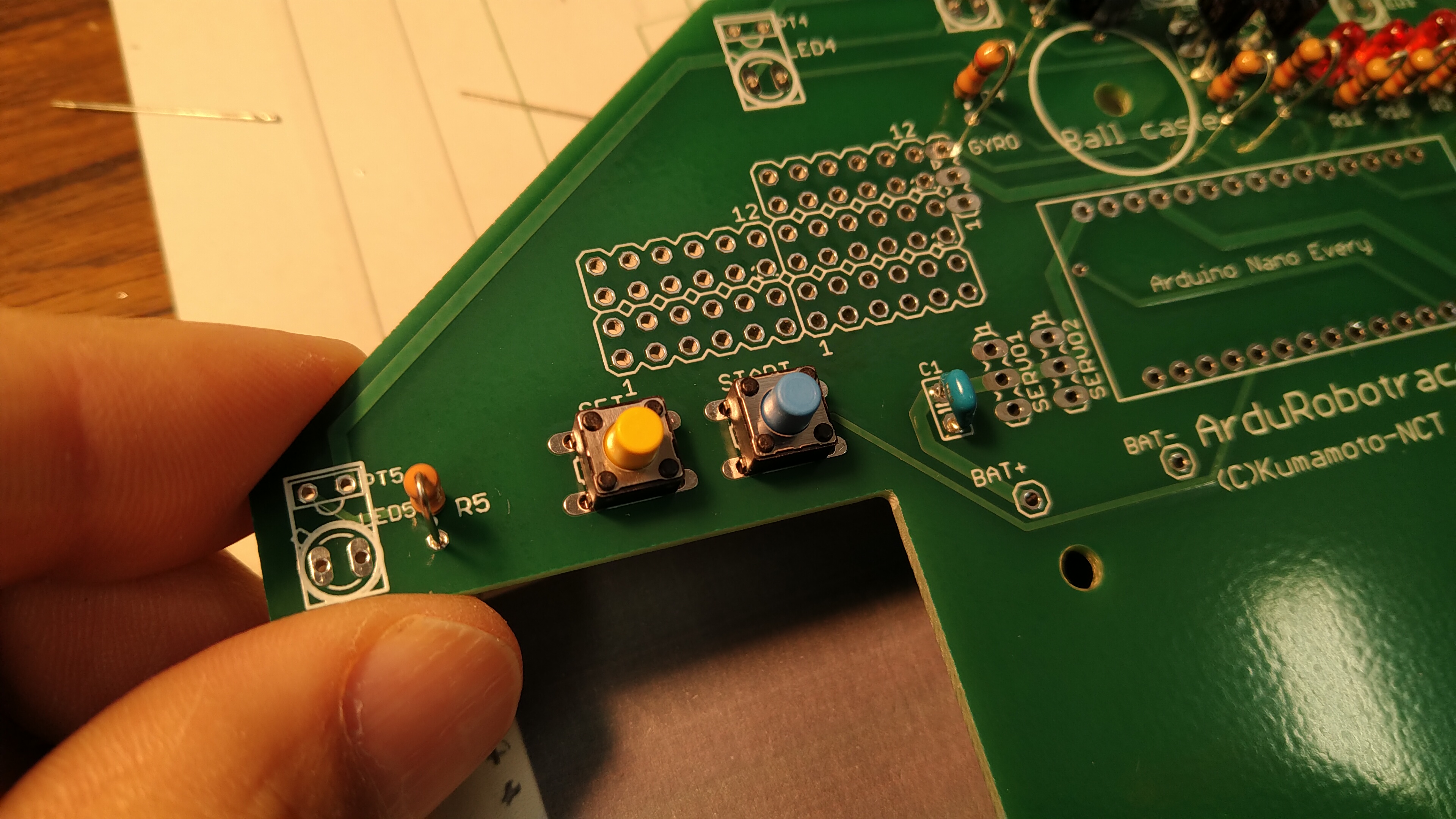
タクトスイッチ2個。黄色がセットスイッチ、青がスタートスイッチです。
リセットスイッチは外付けしてません。ArduinoNanoEveryボード上にリセットボタンがあります。
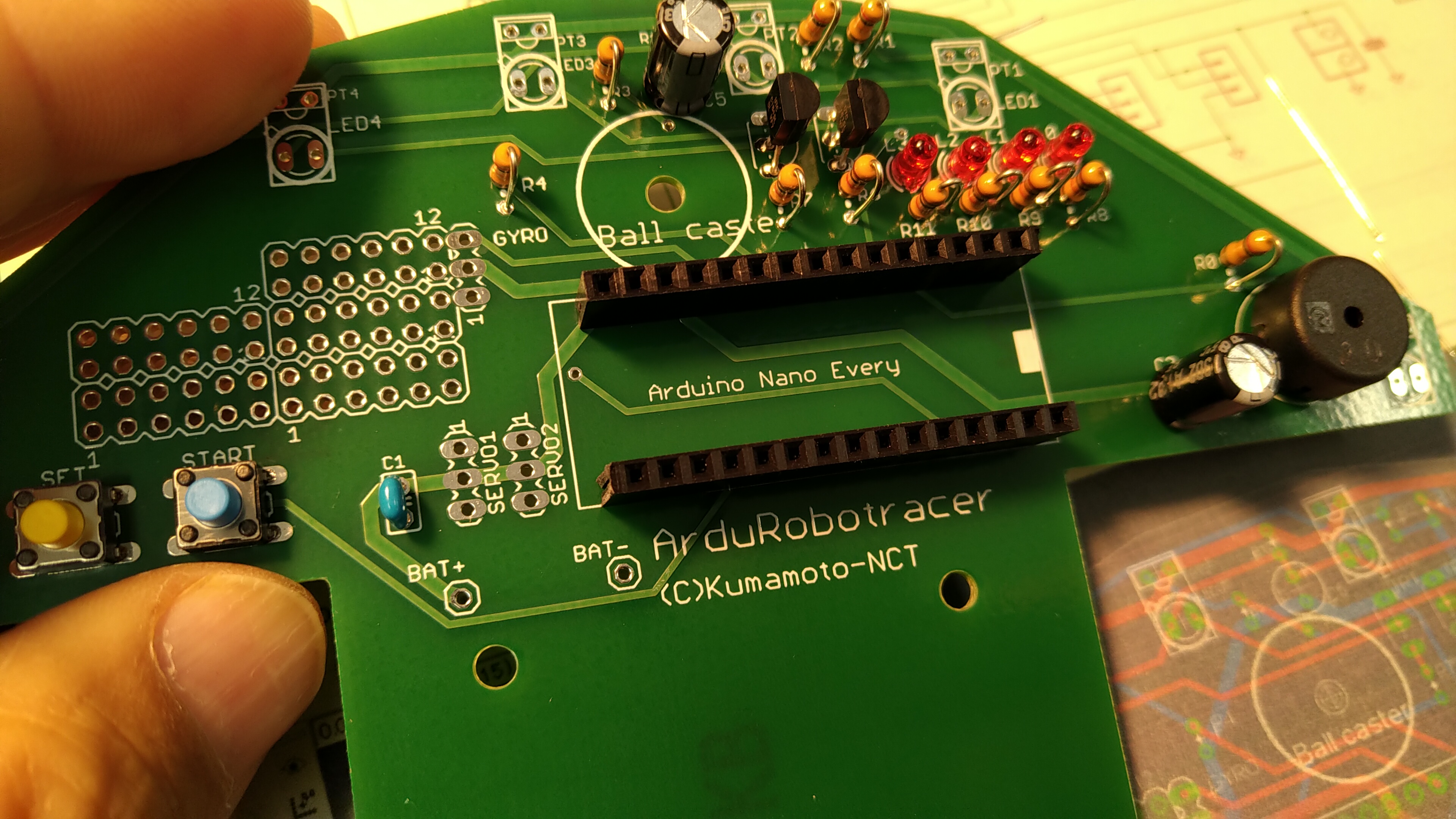
圧電スピーカを取り付け。足の幅がパターンと違った部品なので浮かせて広げてます。
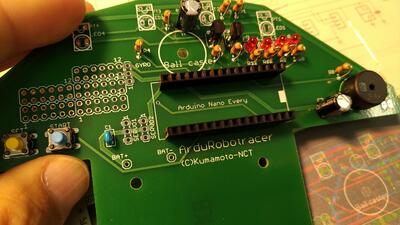
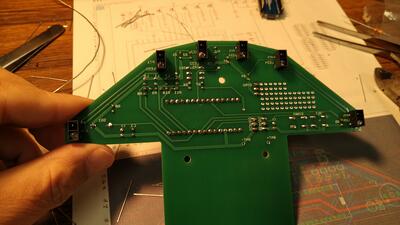
マイコンボード用のピンソケット取り付け。
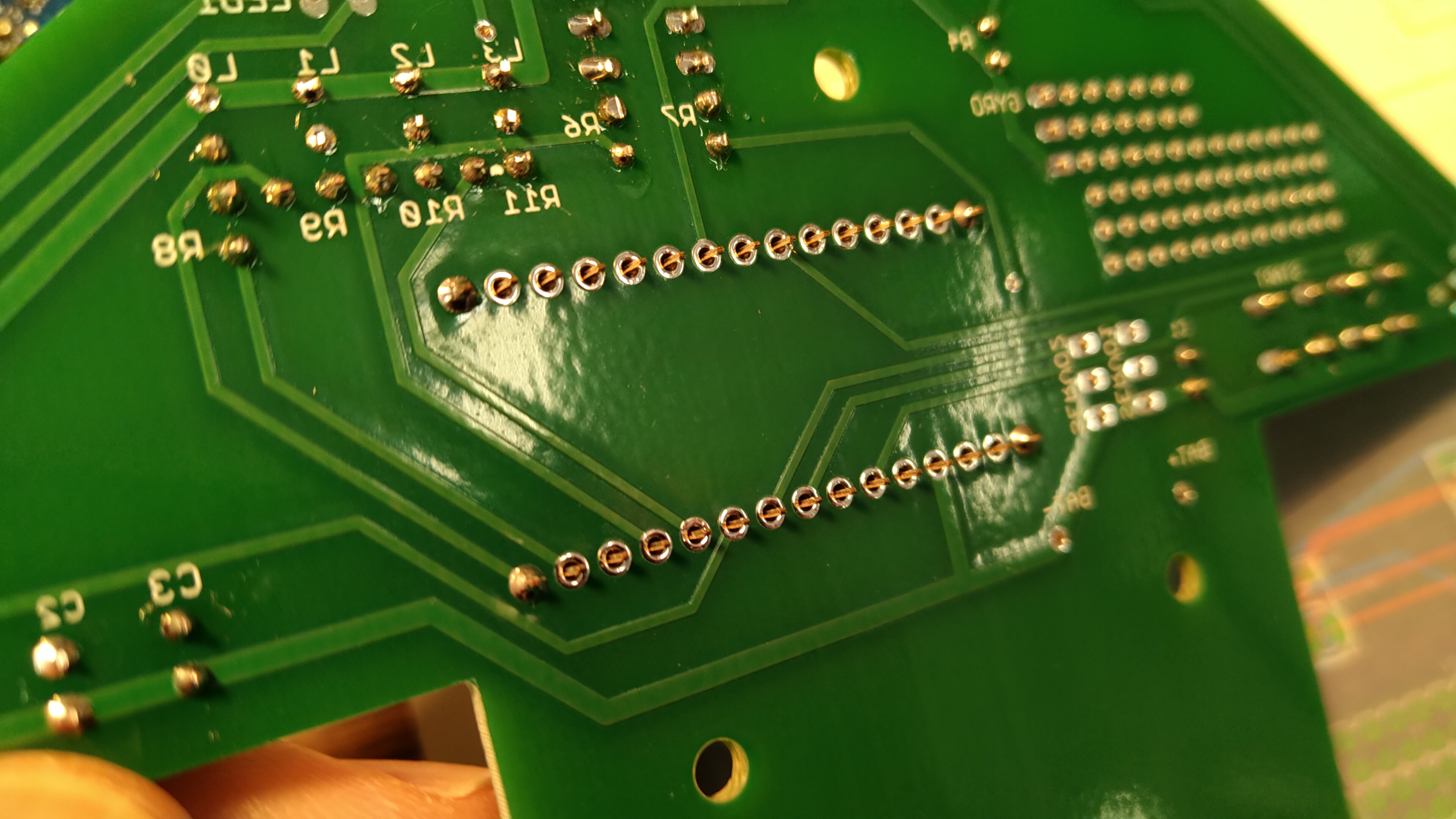
まず両端をハンダ付けして...
Arduino Nano Every ボードがちゃんと刺さることを確認。ソケットが斜めになってるとボードが刺さらないので。確認後に裏面の残りの端子をハンダ付け。
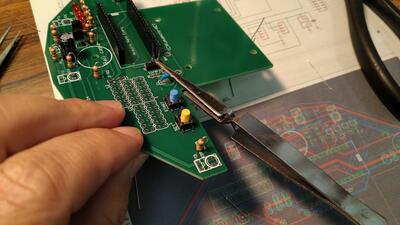
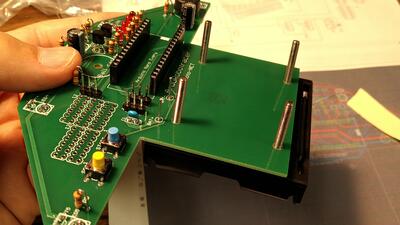
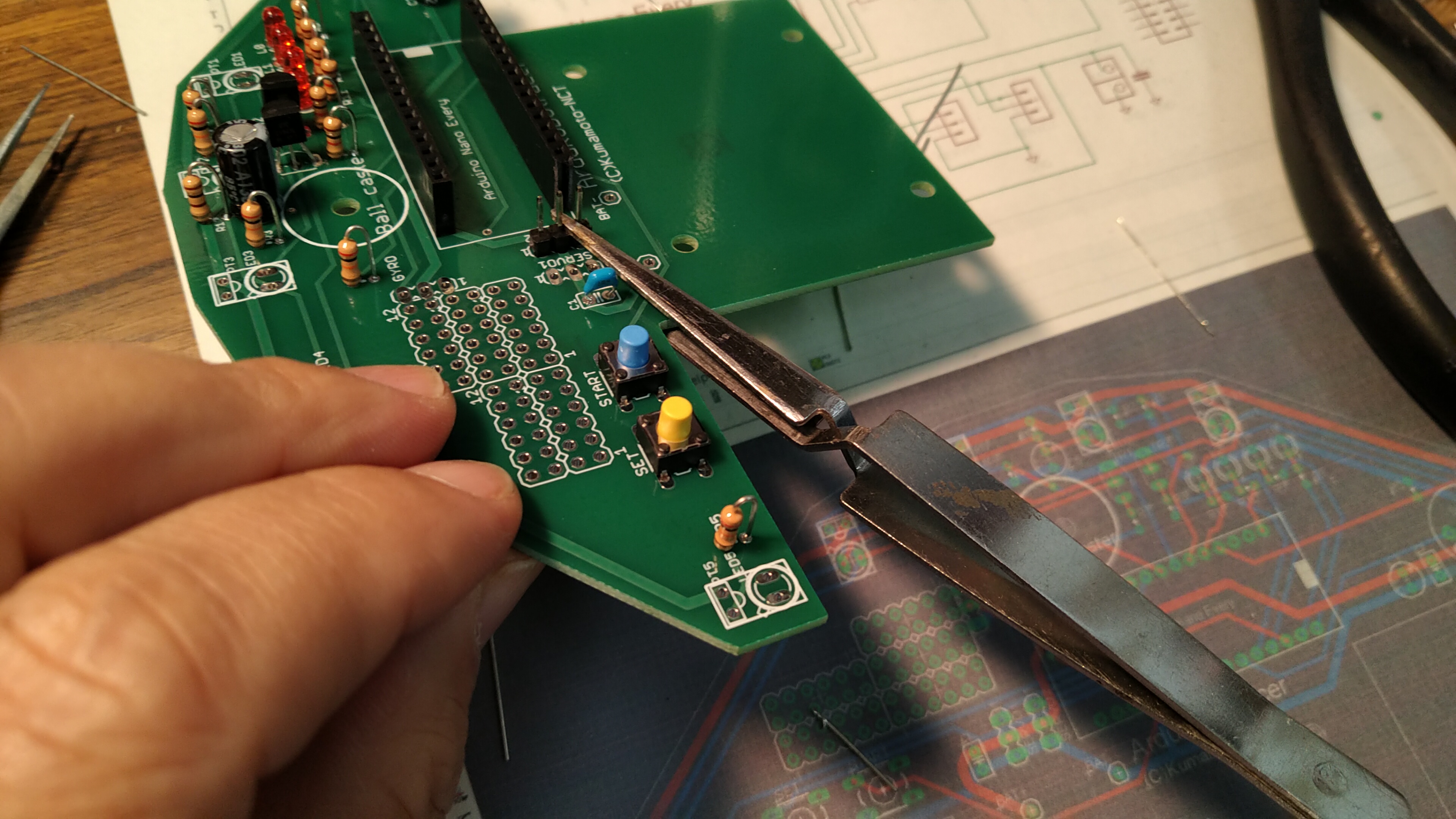
3本ピンヘッダをハンダ付け。こんな風に部品を押さえるピンセットがあれば便利です。
押さえた状態で裏から一部ハンダ付け、ピンセットを外して残りをハンダ付け。
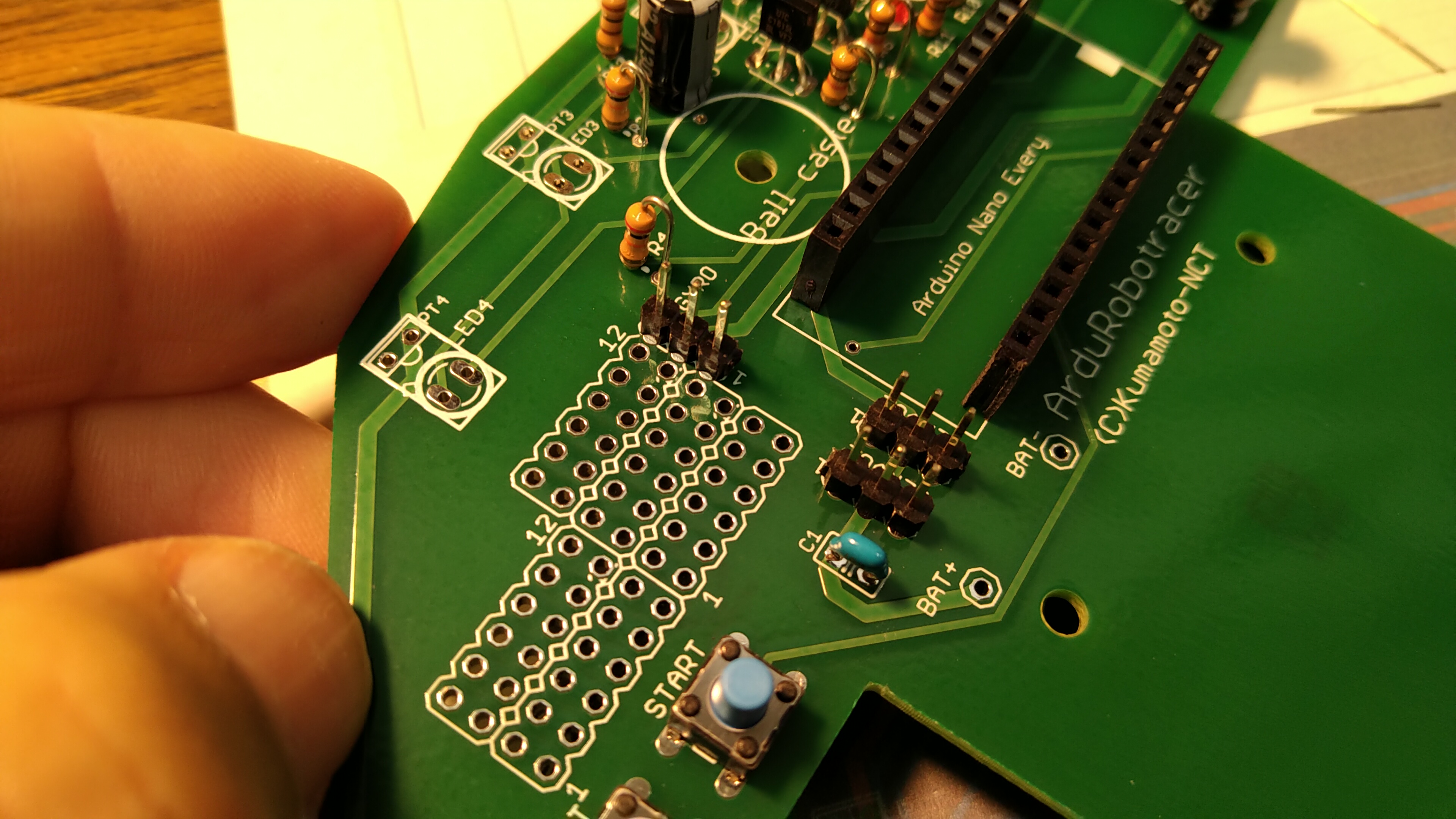
3か所ピンヘッダをつけました。サーボモータを2個。もう一つはジャイロセンサをつけるオプション用です。
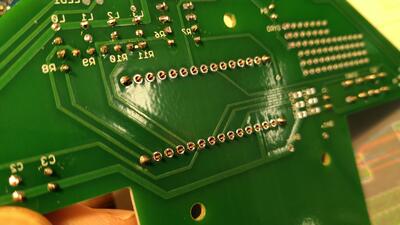
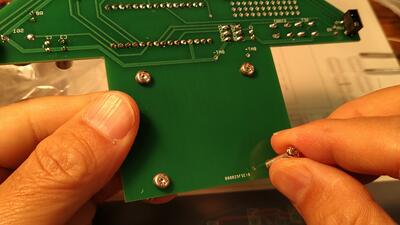
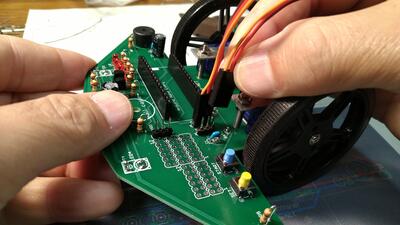
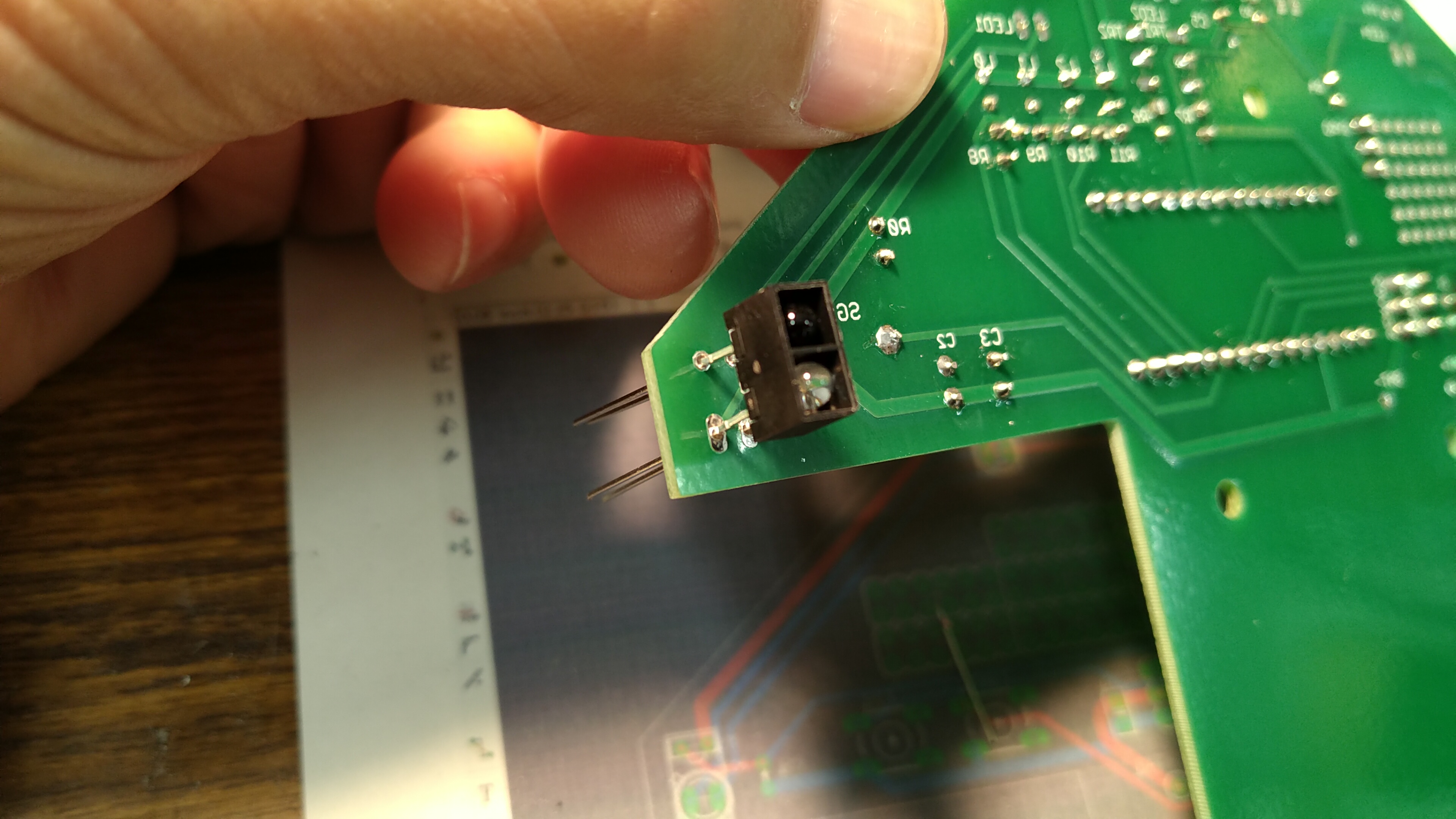
基板の裏から、フォトセンサを取り付け。設計を少しミスしてピンの間隔が狭くて基板面ぴったりには付きませんでしたが、最初から少し浮かせてライントレースのコース面との調整するつもりだったのでまあOK.
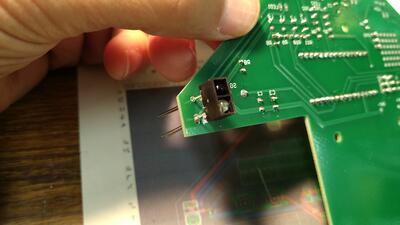
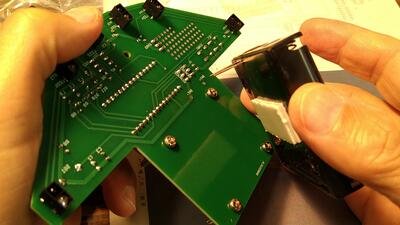
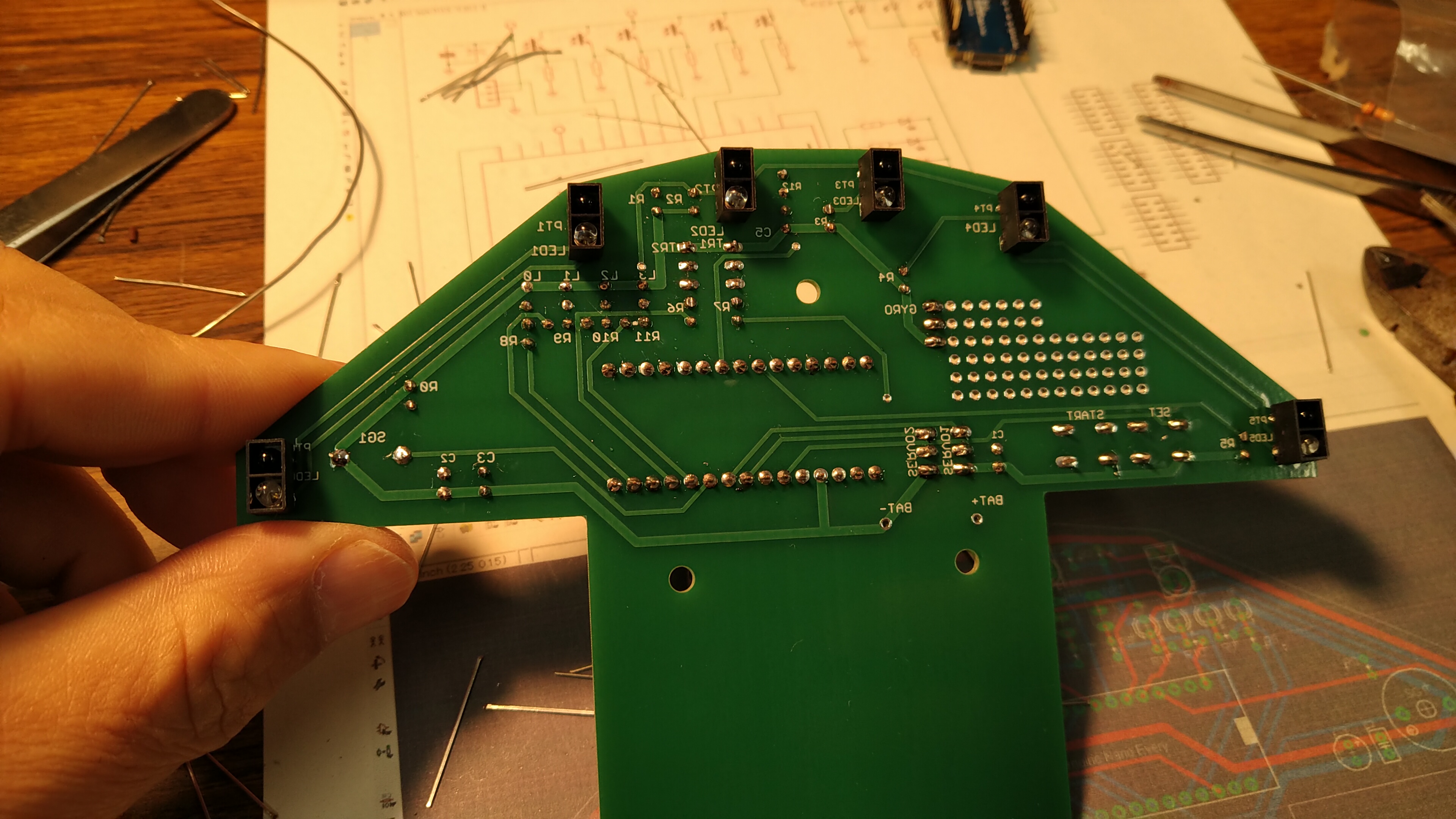
少しずつ浮かせて、6個のフォトセンサを取付完了。
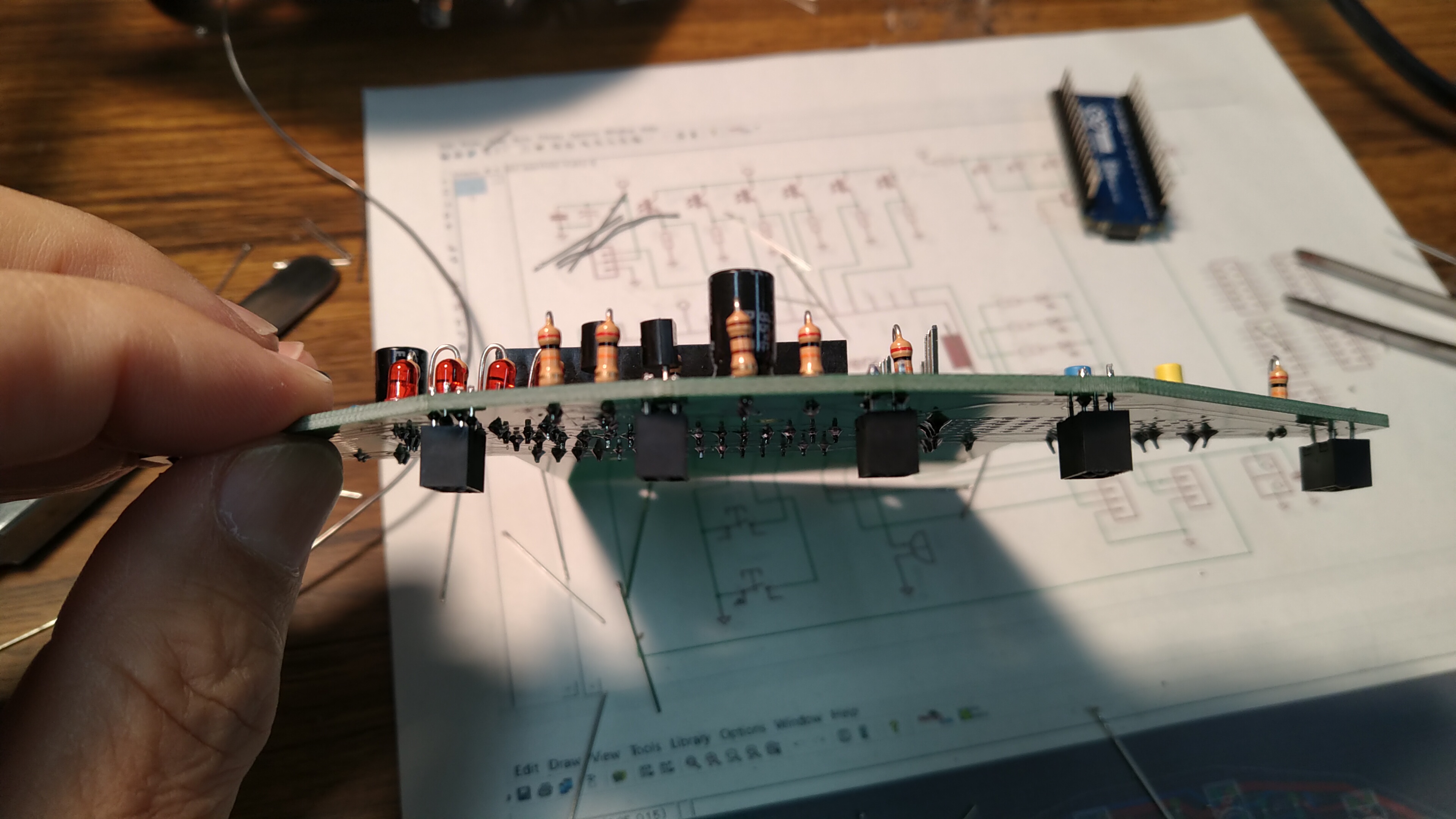
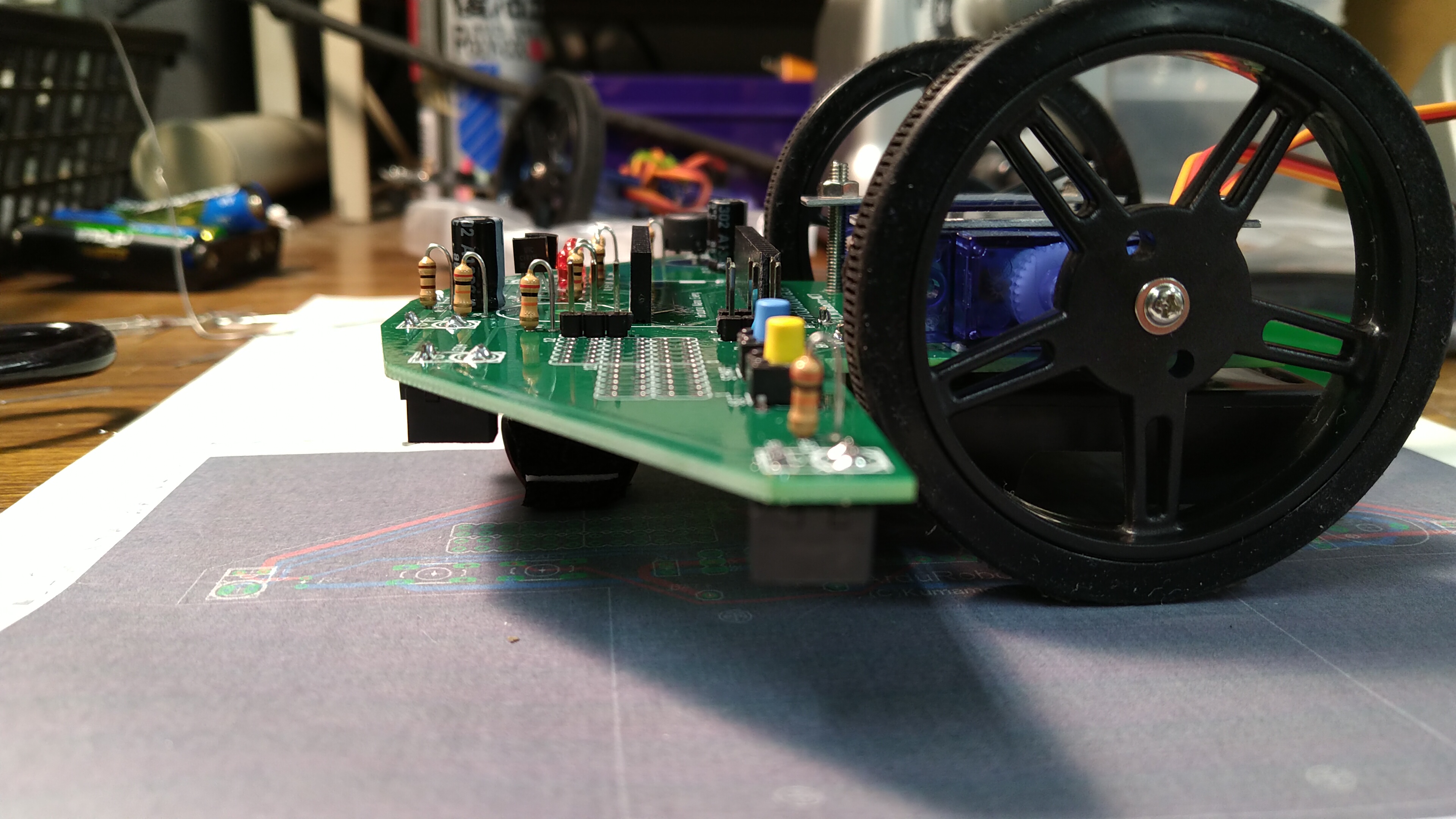
横から見たところ。浮かせてつけても向きがバラバラにならないように。
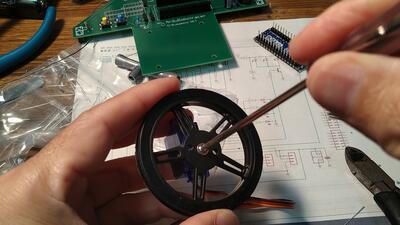
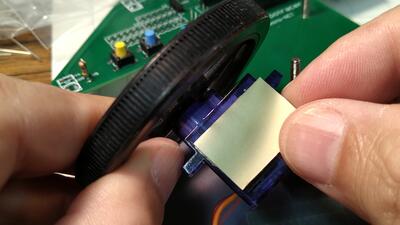
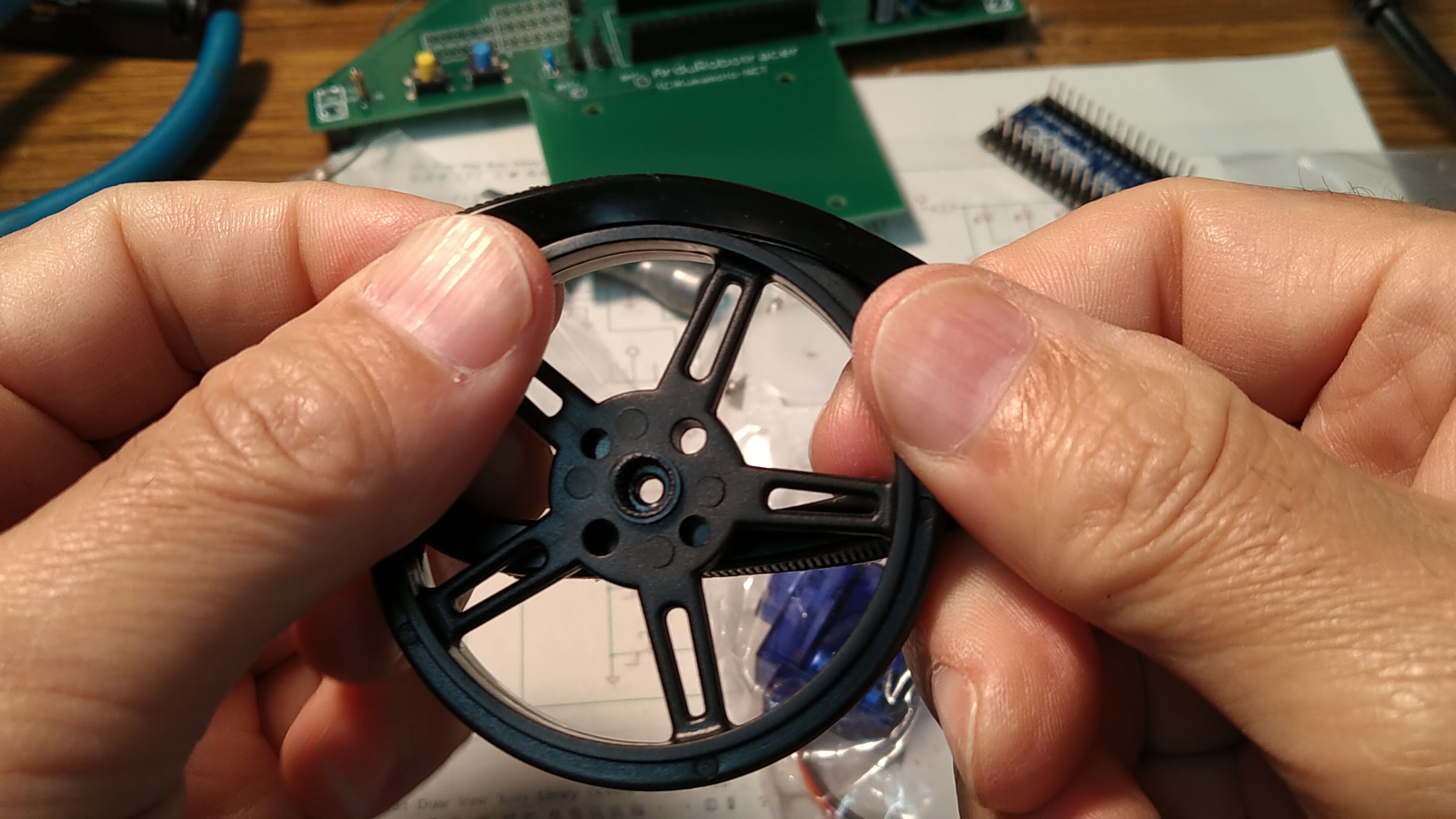
次は足回り。タイヤとホイールとネジが袋に入っているので…

タイヤをホイールに被せます。

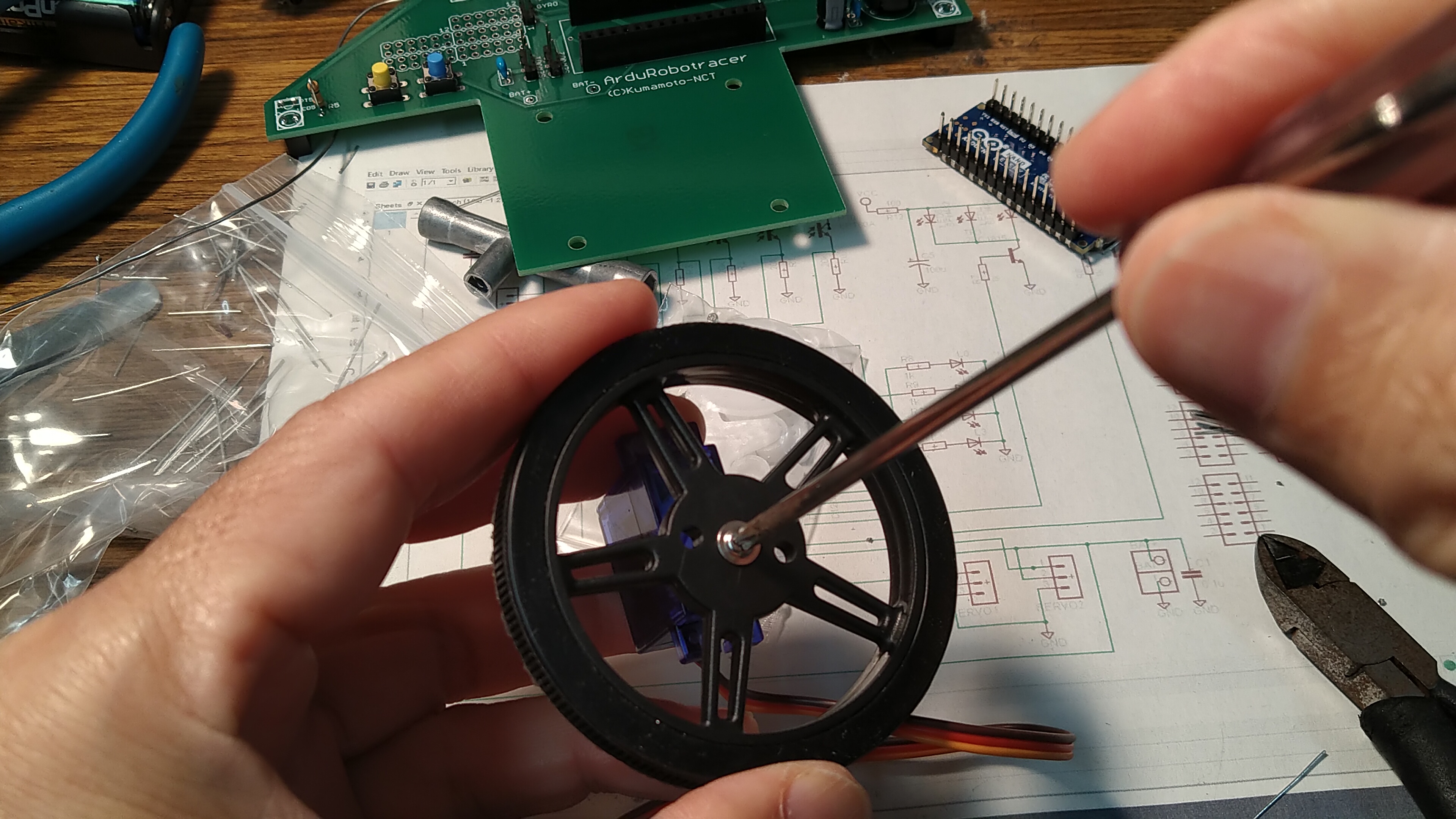
連続回転サーボに差し込んで...

ねじ止め。
次に基板の裏からサーボ固定用のネジを通します。
こんな風に電池ボックスが来る予定なので先に刺しておきます。

電池ボックスと基板の隙間がネジの頭分の高さがあるので、両面テープを二重に貼ってピンを刺して電池ボックスを貼り付け。
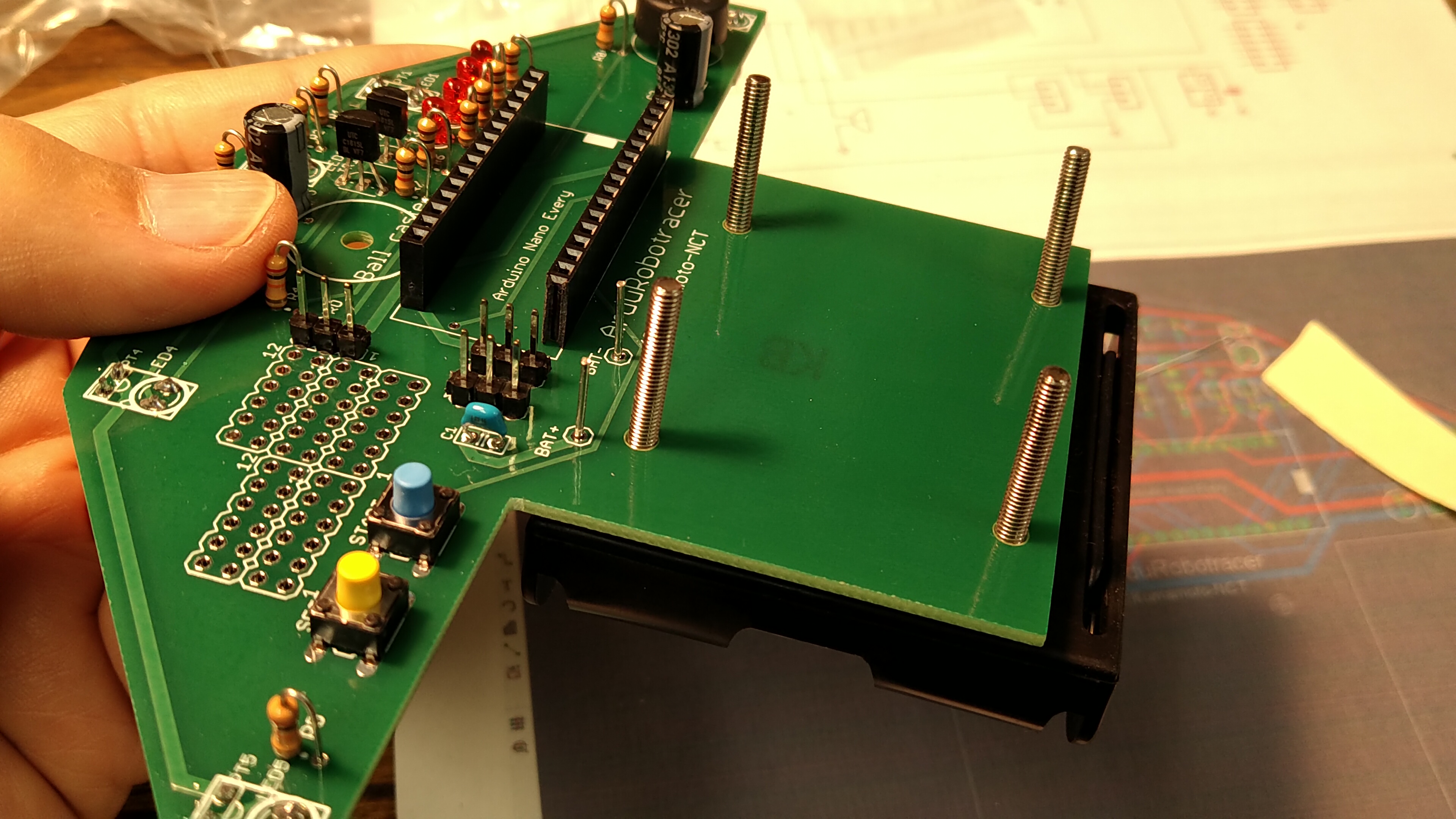
表面にはネジだけ出てる状態になります。
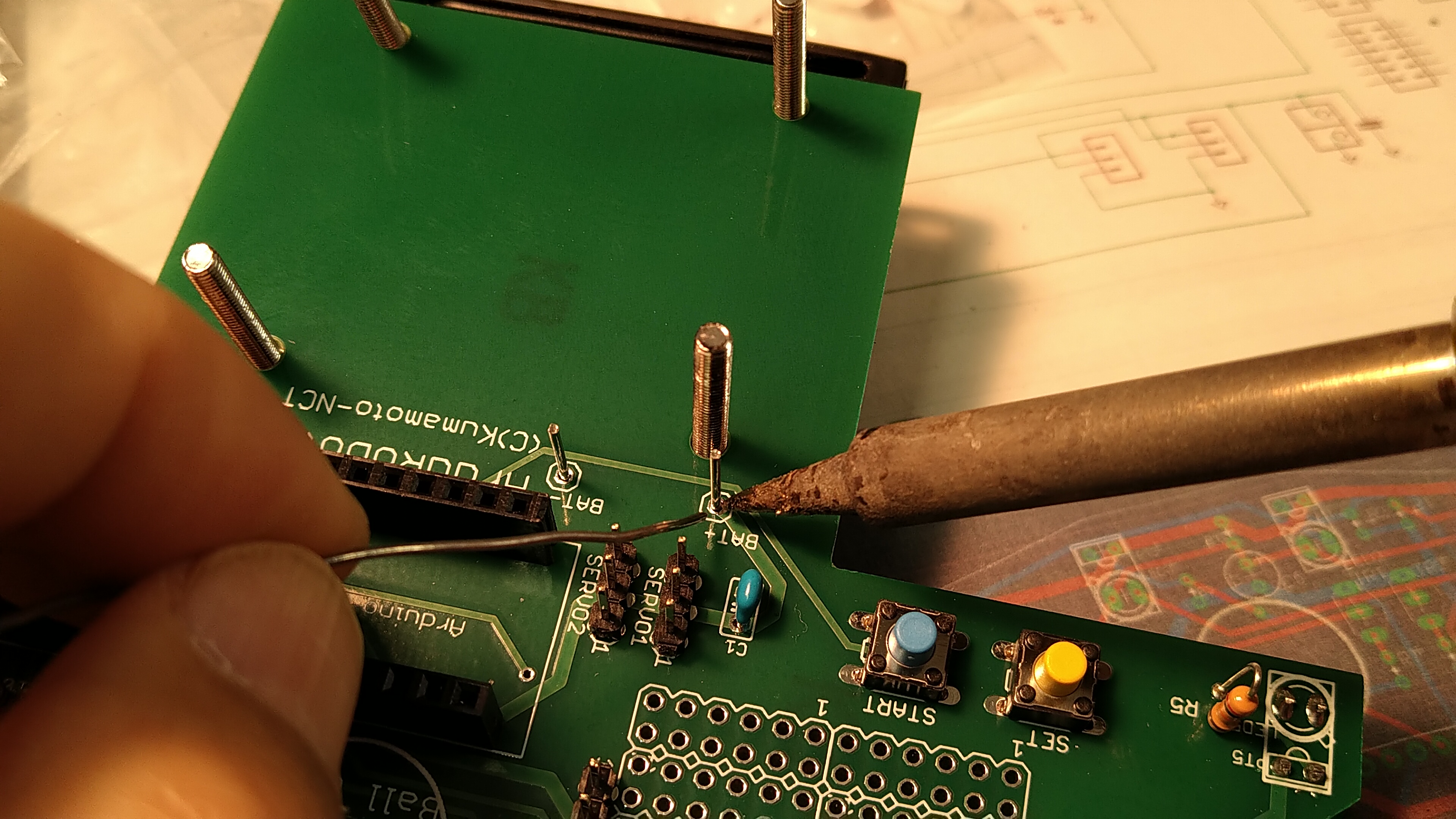
電池ボックスのピンを2か所ハンダ付け。
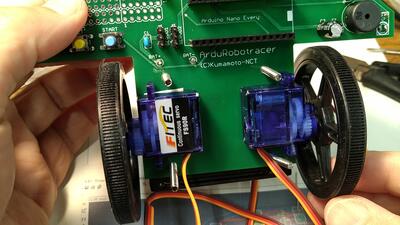
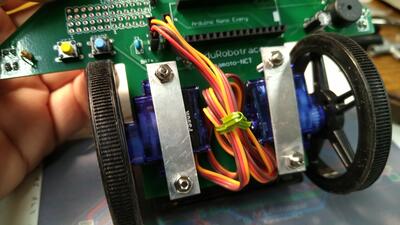
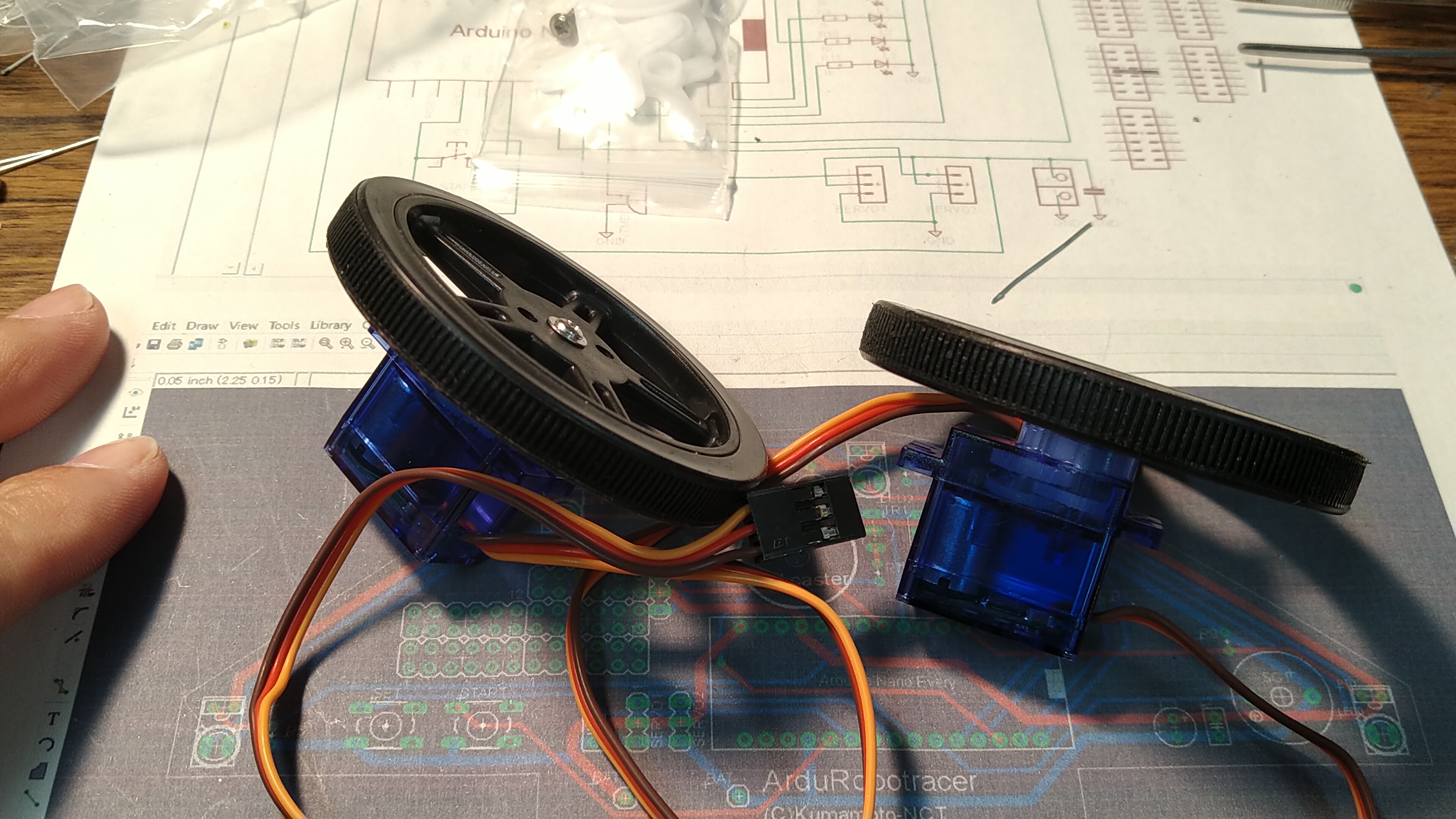
次にサーボモータに両面テープを貼って...
基板に張り付け。貼り付け方向に注意。左右で裏返しになります。
サーボモータ固定用の金具をアルミ板を切り出して別に作りました。アルミ板で押さえてナットで締めます。
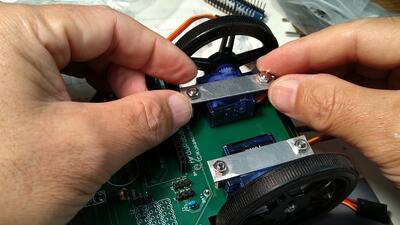
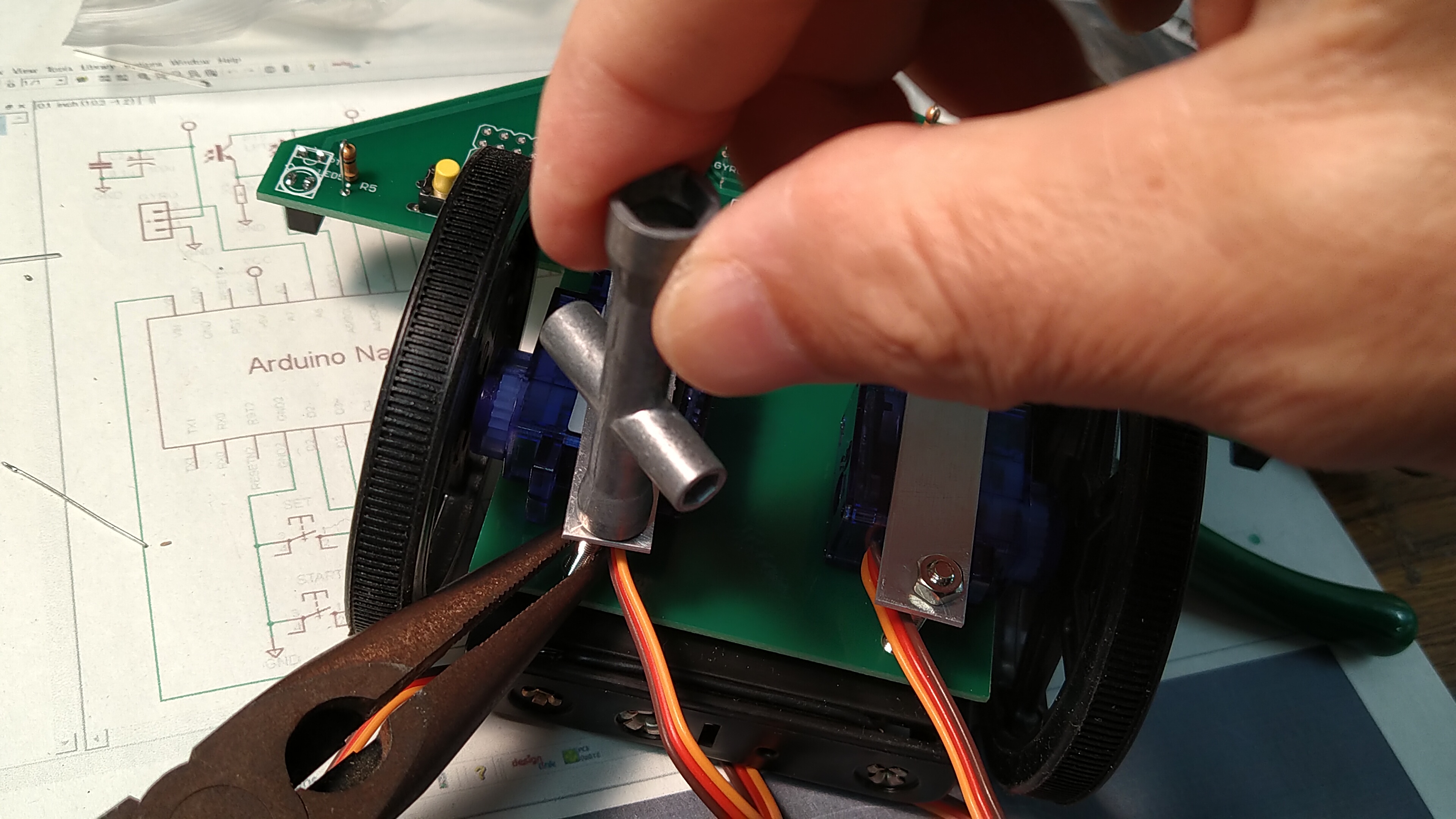
ネジの頭側は隠れているので、こんな風にネジをラジオペンチで押さえて、ナット側を回します。
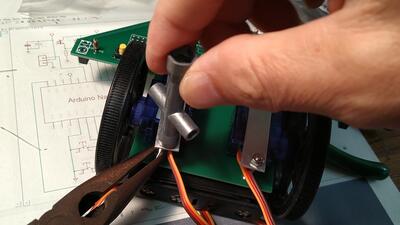
これでサーボは動きません。
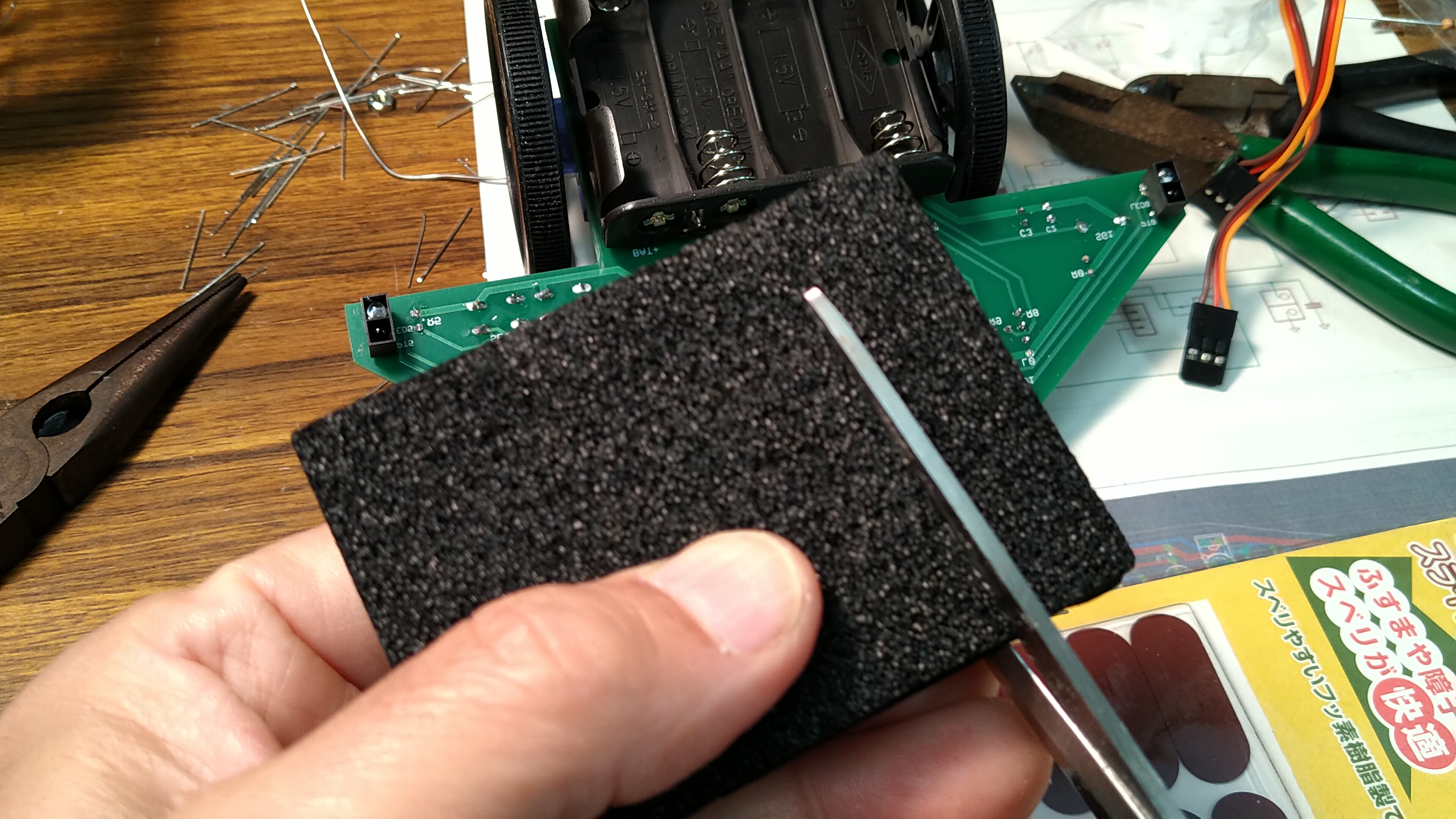
次に、適当なクッション材を切って...
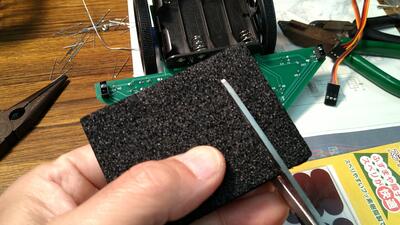
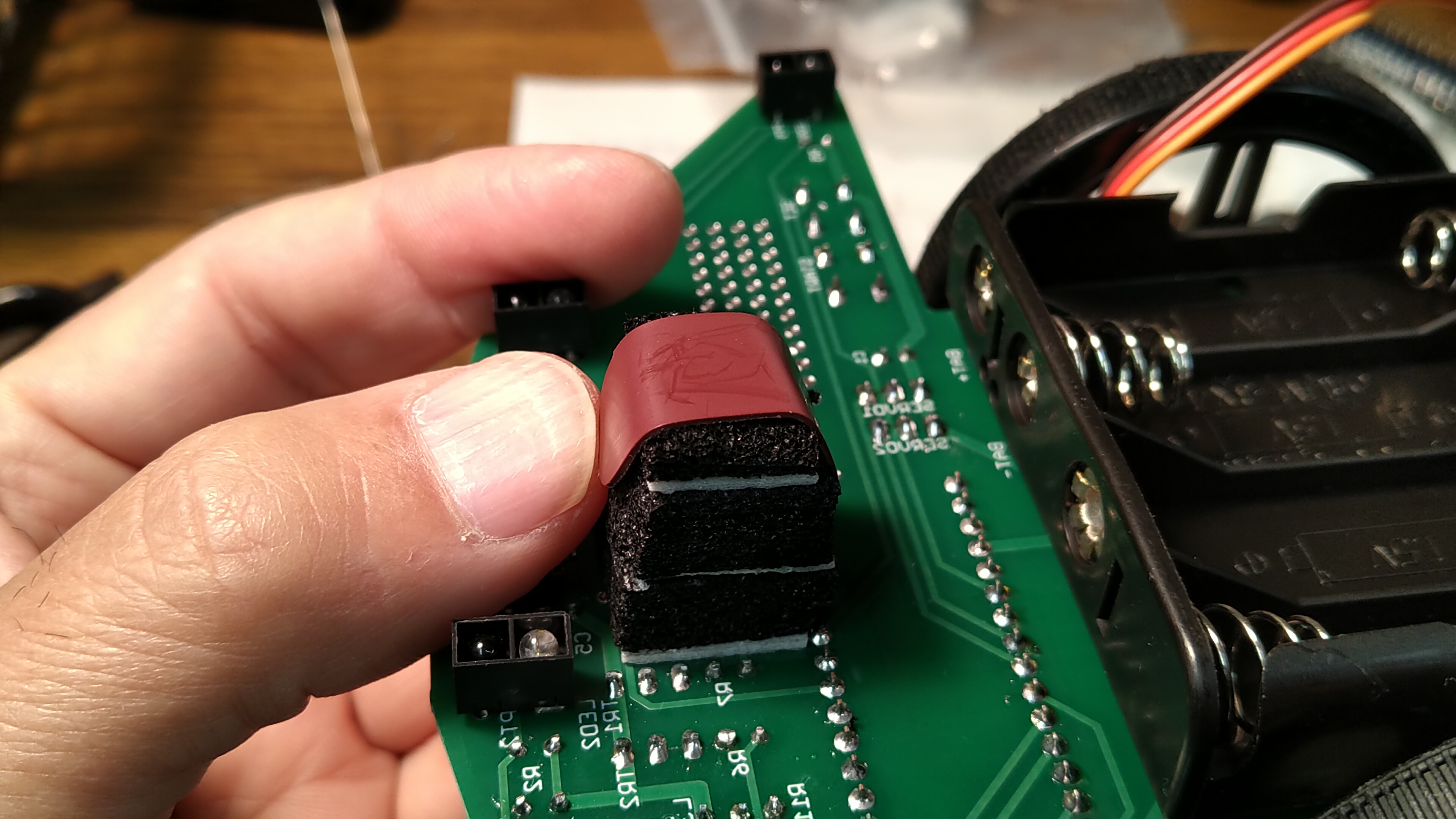
滑り材を高さを合わせて張り付けます。

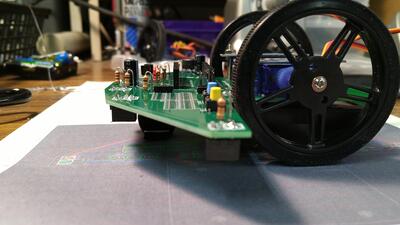
横から見たらこんな風に、基板がほぼ水平になるように調整。車輪が回ると前の滑り材で滑りながら走ることになります。丁度よい高さ大きさのボールキャスターなどがあれば取り付けられるように場所を開けてネジ穴もあけてあります。
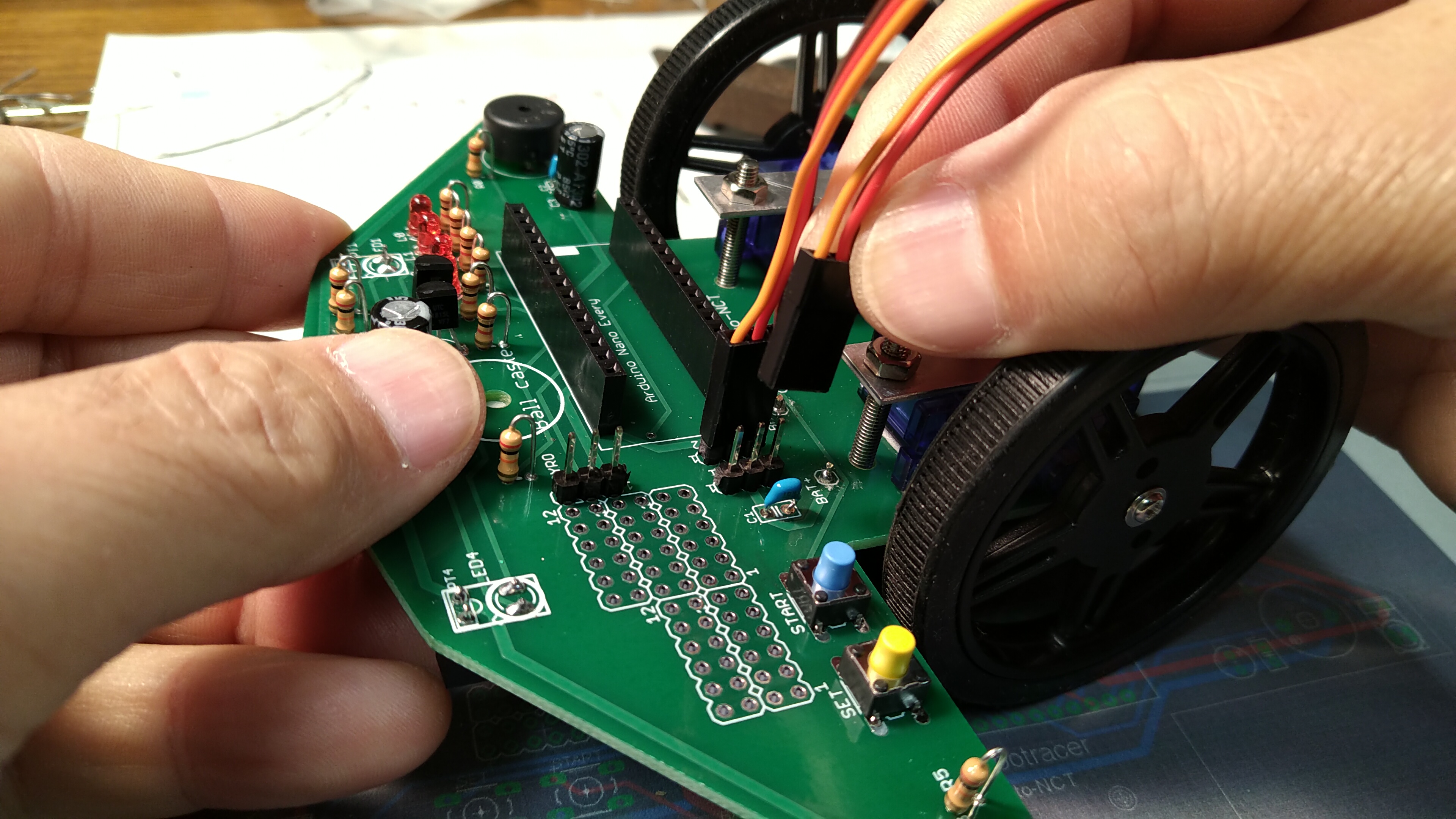
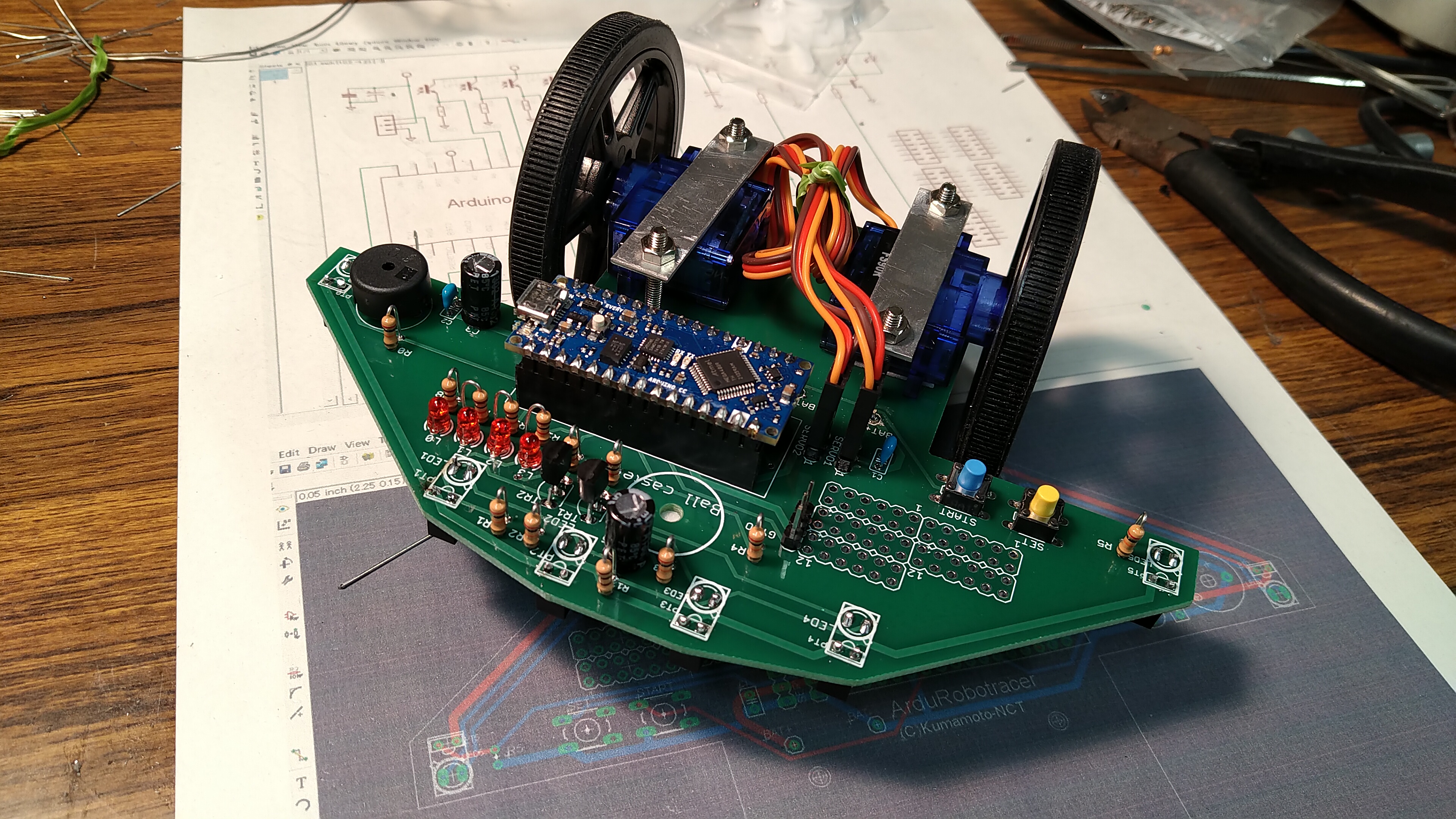
サーボモータのケーブル2本をピンヘッダに刺します。
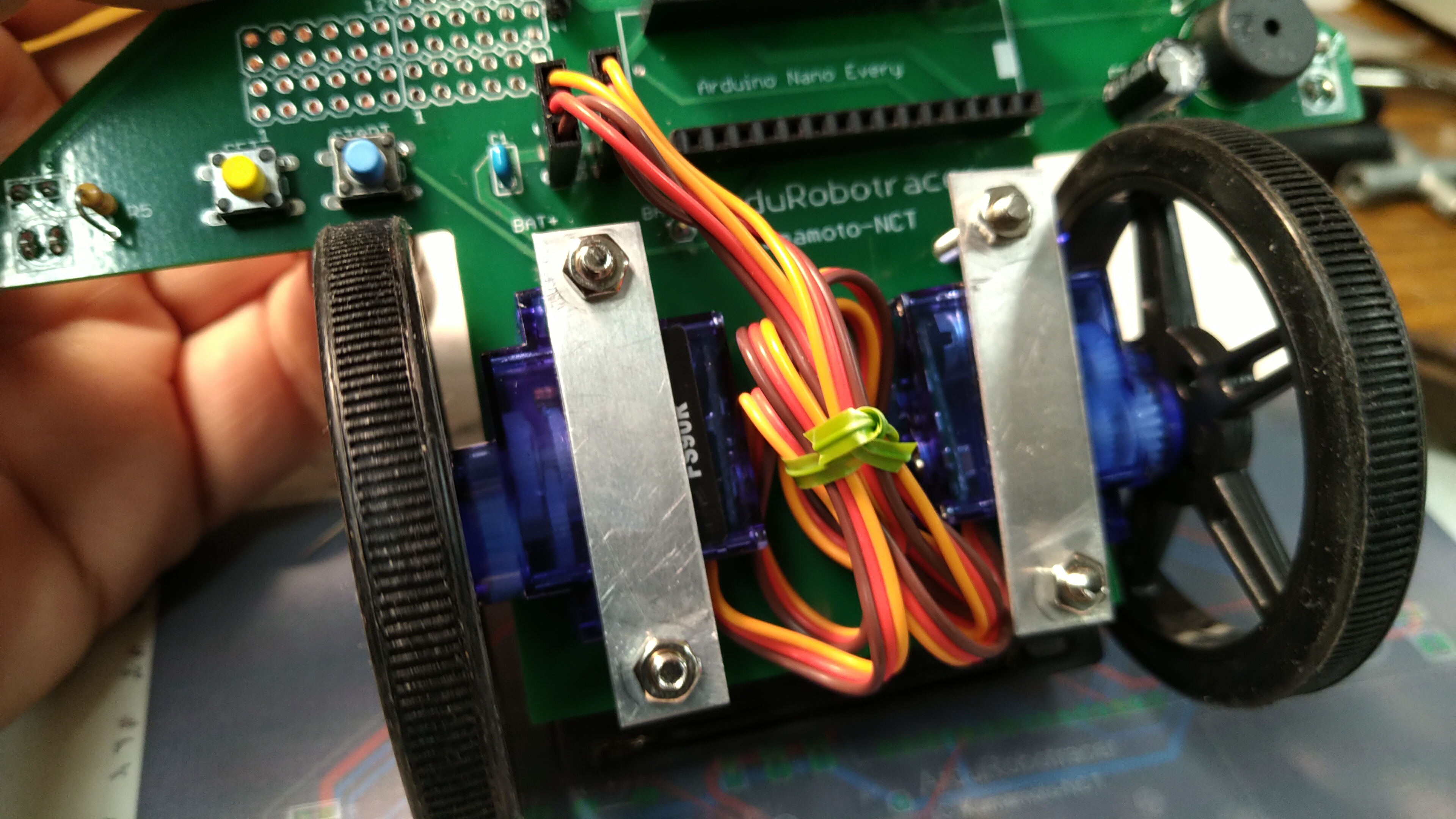
ケーブルは邪魔にならないようにまとめて適当なバンドで結びます。
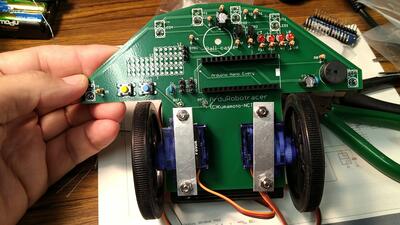
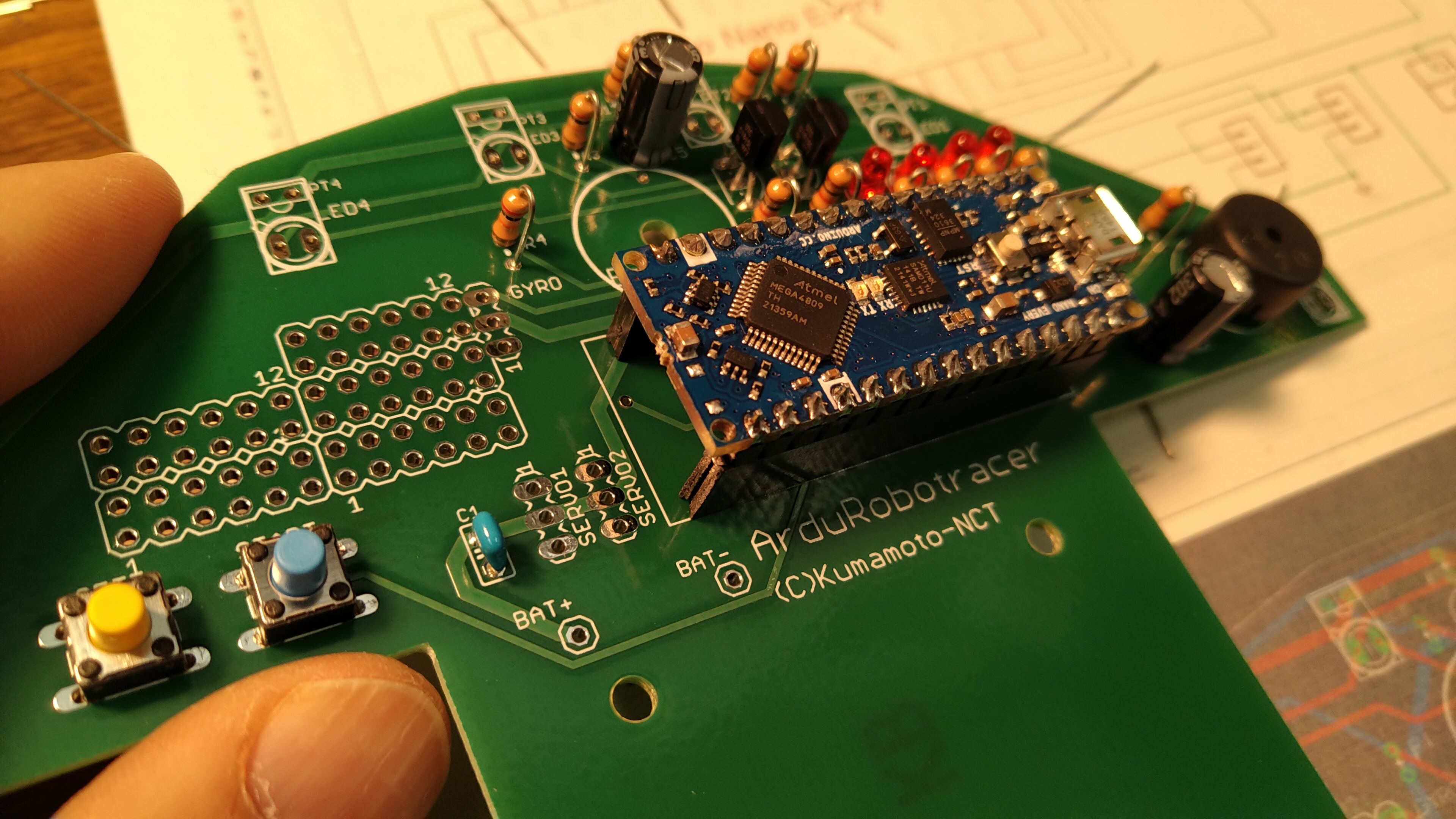
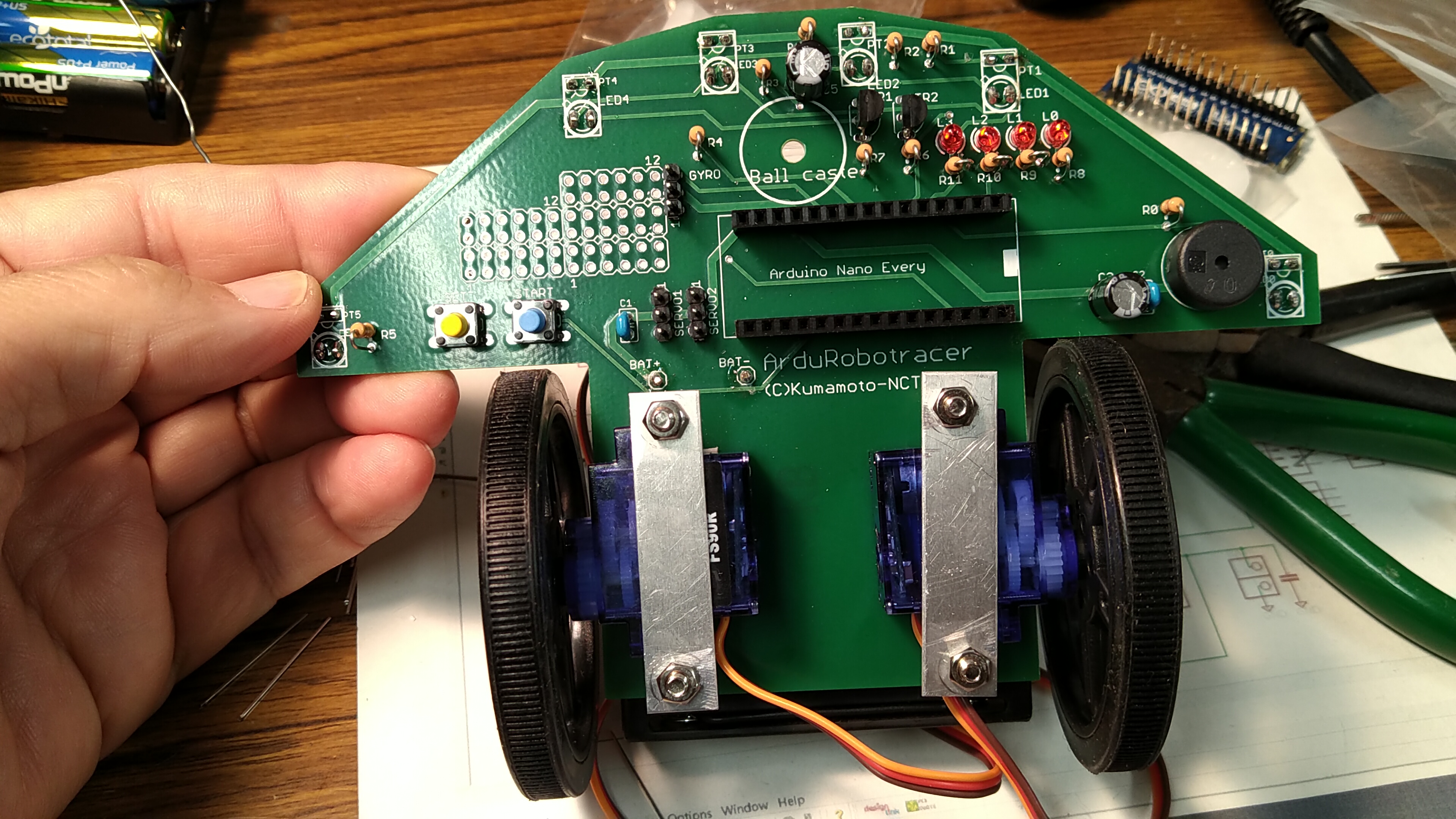
最後にArduino Nano Everyボードを刺して...

ロボット本体の完成!
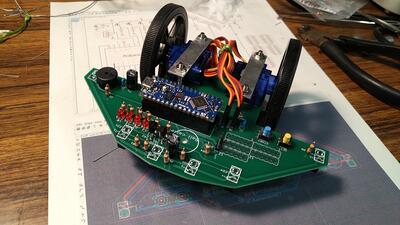
部品を探して確認しながら、写真も撮りながら製作して約2時間でした。部品が揃ってて作るだけなら1時間半くらいでできると思います。
Arduino Nano Everyボードの購入はこちらから。
1kΩの抵抗をまずハンダ付け。LEDの電流制限と、トランジスタのベース抵抗。
低い部品、熱に強い部品、組み立て順序を考えて後からつける部品の邪魔にならないものからハンダ付けしていきます。
次はフォトトランジスタのエミッタ負荷の20kΩの抵抗のハンダ付け。ゆっくり走るロボットなので、ラインの読み取り感度優先で抵抗値は大きめです。大きいとレスポンスが遅くなります。高速走行を目指すならこの抵抗は1kΩ程度が良いですが感度が下がるのでラインに近づけるとかライン照射の赤外LEDの光量アップとか考えないといけません。
100Ωの抵抗をハンダ付け。これは電解コンデンサの充電用途と赤外LEDの電流制限の両方を兼ねています。
次に標示用LEDを4本取り付け、極性があるので、足の長い方が抵抗側になるように。
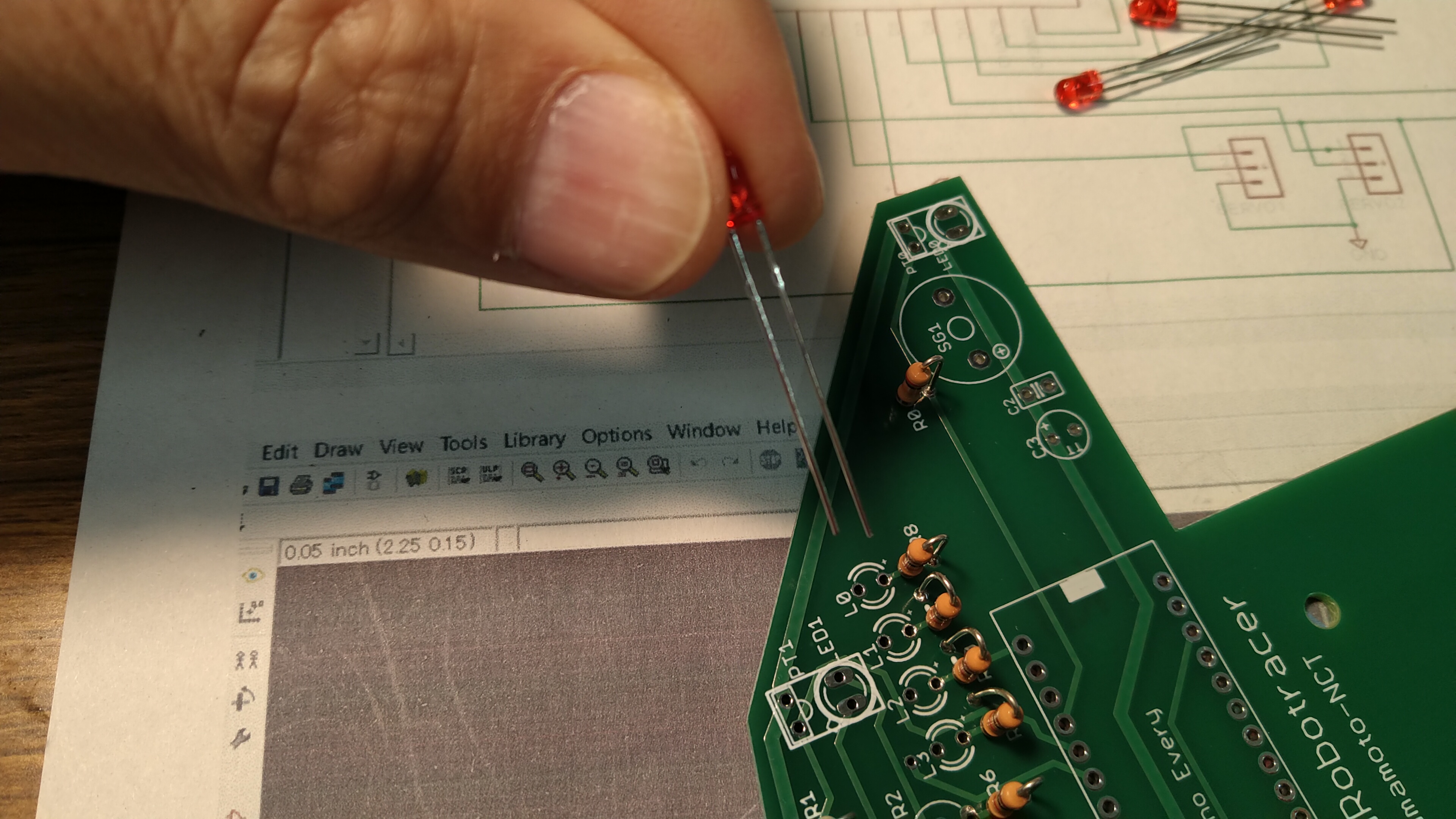
LEDは少し浮かせてつけた方が良いです。ぴったりつけると熱ストレスで足が引っ張られて故障の原因になります。
次は、トランジスタ2個。2SC1815相当をハンダ付け。赤外LEDのスイッチングに使います。
積層セラミックキャパシタを2か所ハンダ付け。IC1個に1個が基本ですが、電源近くとサーボモータの近くに1個ずつ。マイコンボード上にもコンデンサは乗ってるので保険みたいなものかも。背が低くて抜けやすい部品だったのでいったんセロハンテープで仮止めしてハンダ付け。
次は電解コンデンサを2個。だんだん背が高くなってきます。電解液が入ってるので熱には弱いのでちょっと気にして最後の方でハンダ付け。電源のところと、赤外LED点灯の電流源として使います。
タクトスイッチ2個。黄色がセットスイッチ、青がスタートスイッチです。
リセットスイッチは外付けしてません。ArduinoNanoEveryボード上にリセットボタンがあります。
圧電スピーカを取り付け。足の幅がパターンと違った部品なので浮かせて広げてます。

マイコンボード用のピンソケット取り付け。
まず両端をハンダ付けして...
Arduino Nano Every ボードがちゃんと刺さることを確認。ソケットが斜めになってるとボードが刺さらないので。確認後に裏面の残りの端子をハンダ付け。
3本ピンヘッダをハンダ付け。こんな風に部品を押さえるピンセットがあれば便利です。
押さえた状態で裏から一部ハンダ付け、ピンセットを外して残りをハンダ付け。
3か所ピンヘッダをつけました。サーボモータを2個。もう一つはジャイロセンサをつけるオプション用です。
基板の裏から、フォトセンサを取り付け。設計を少しミスしてピンの間隔が狭くて基板面ぴったりには付きませんでしたが、最初から少し浮かせてライントレースのコース面との調整するつもりだったのでまあOK.
少しずつ浮かせて、6個のフォトセンサを取付完了。
横から見たところ。浮かせてつけても向きがバラバラにならないように。
次は足回り。タイヤとホイールとネジが袋に入っているので…

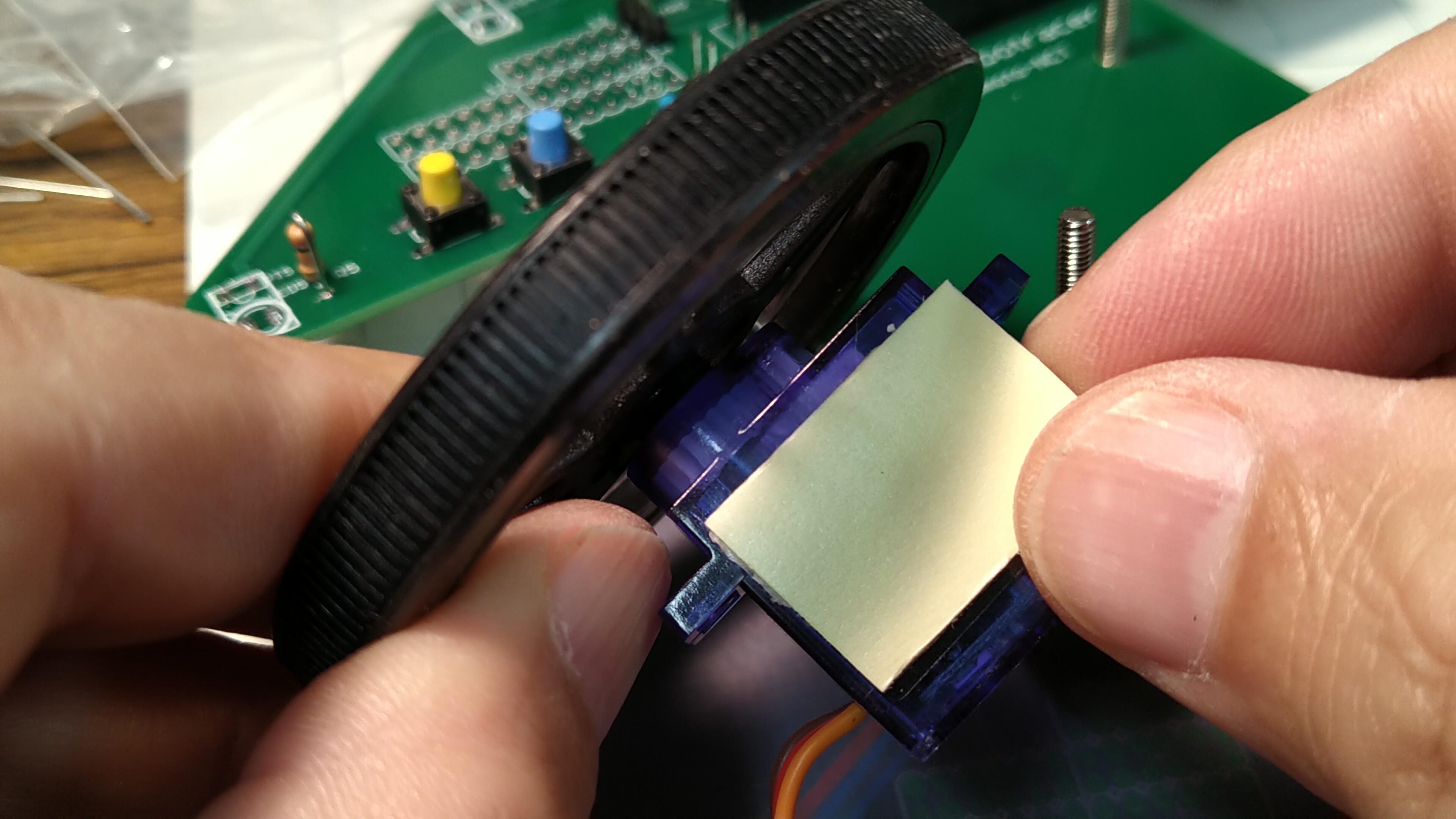
タイヤをホイールに被せます。
連続回転サーボに差し込んで...

ねじ止め。
次に基板の裏からサーボ固定用のネジを通します。
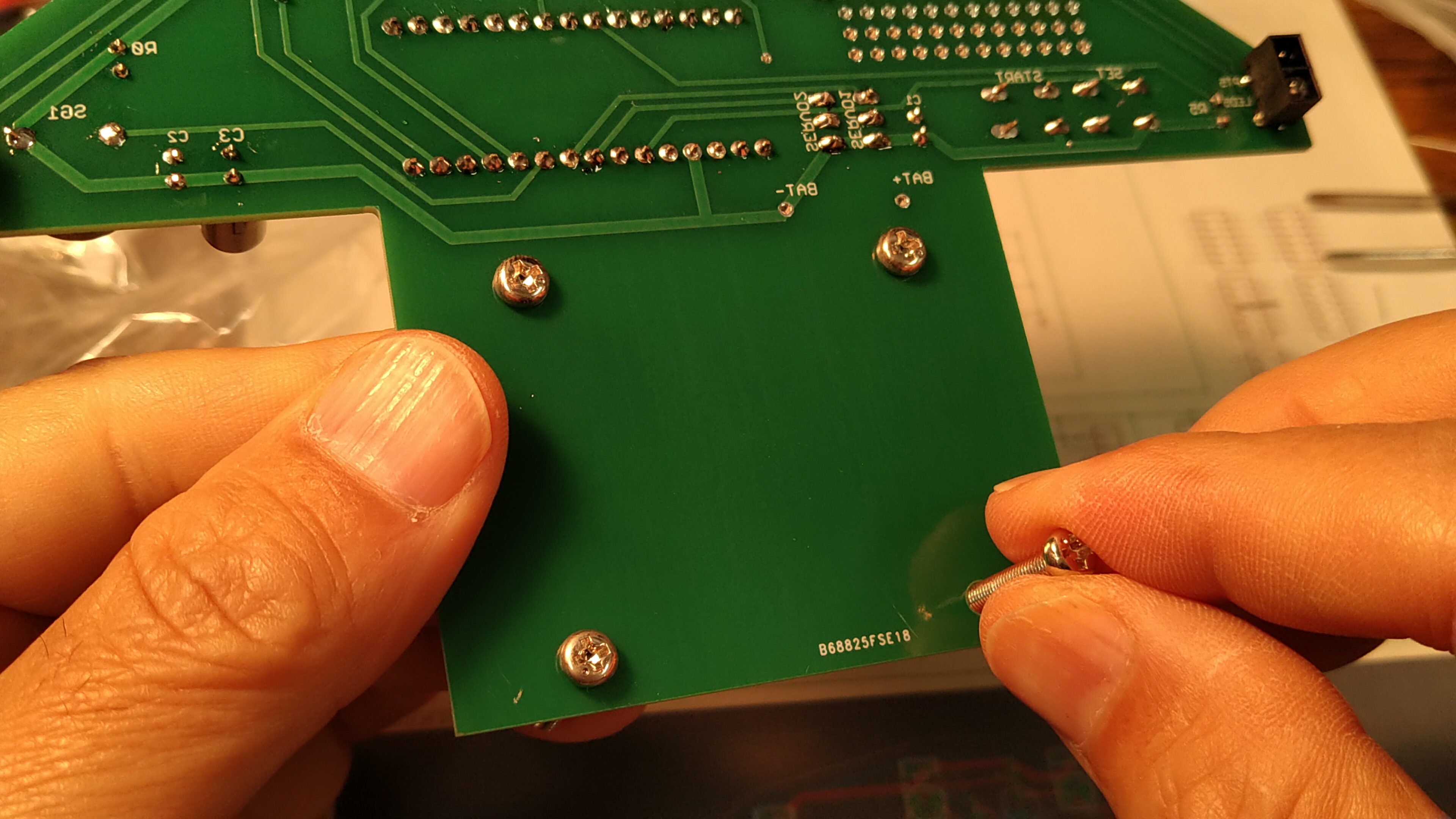
こんな風に電池ボックスが来る予定なので先に刺しておきます。
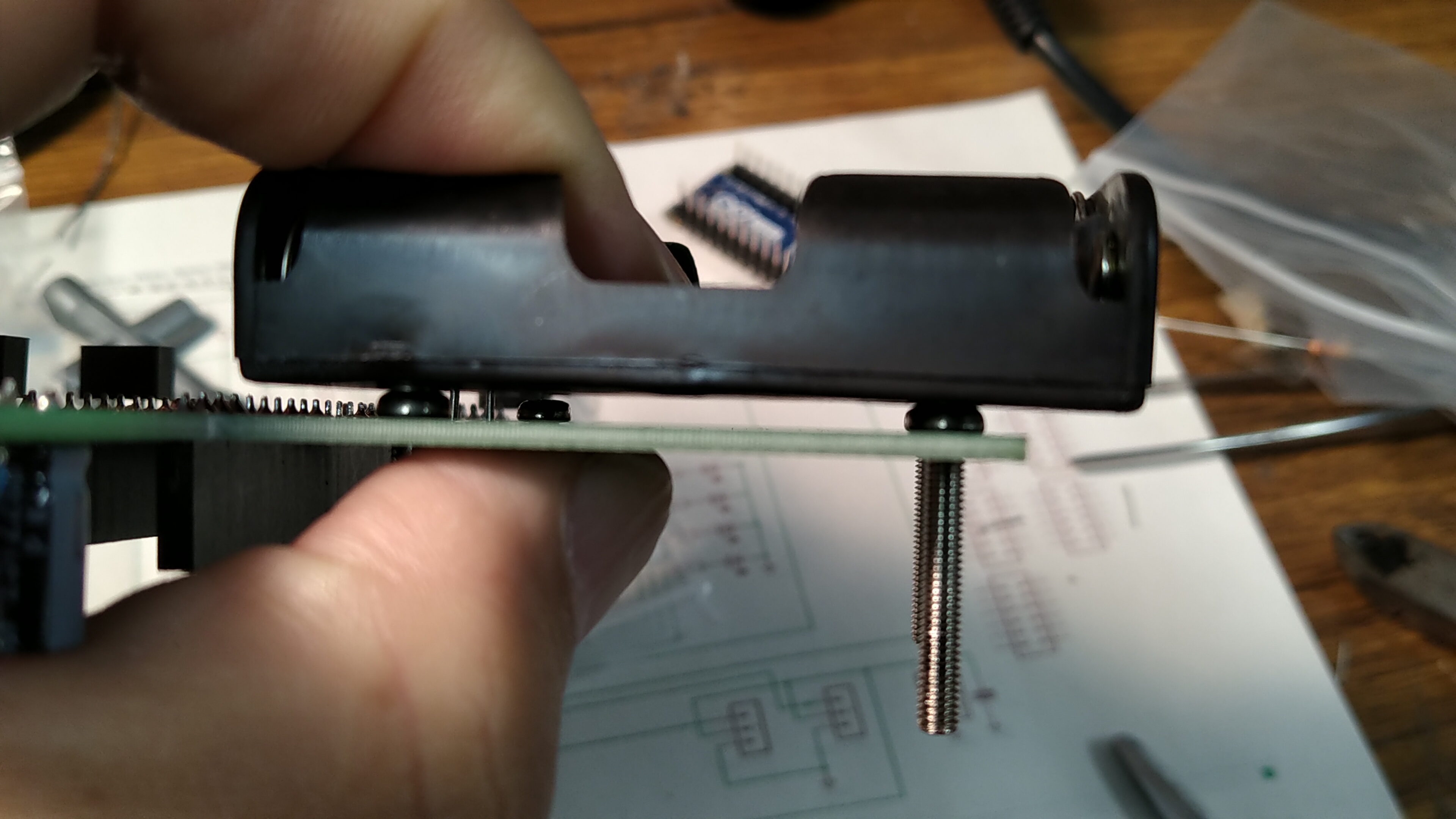
電池ボックスと基板の隙間がネジの頭分の高さがあるので、両面テープを二重に貼ってピンを刺して電池ボックスを貼り付け。
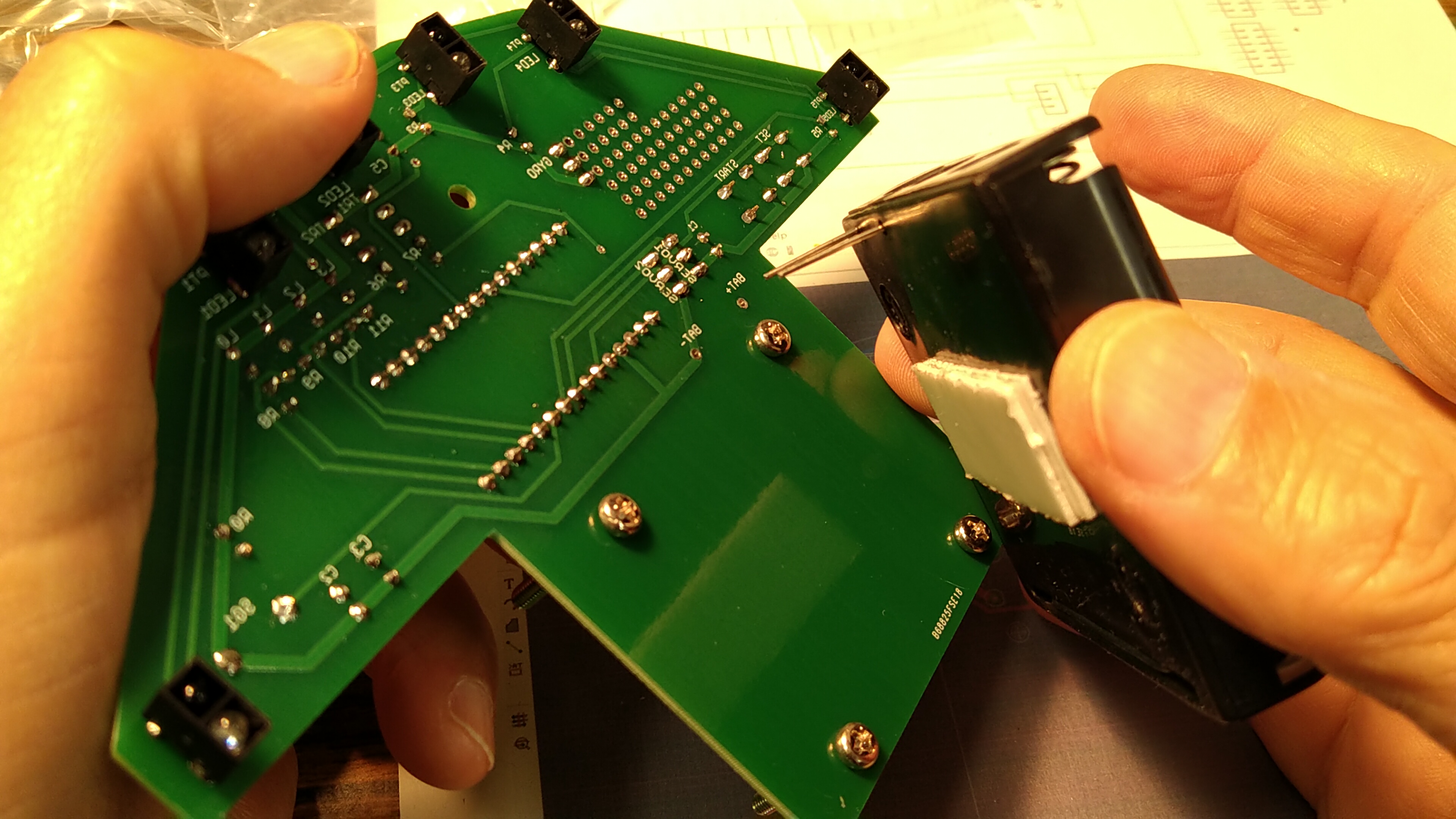
表面にはネジだけ出てる状態になります。
電池ボックスのピンを2か所ハンダ付け。
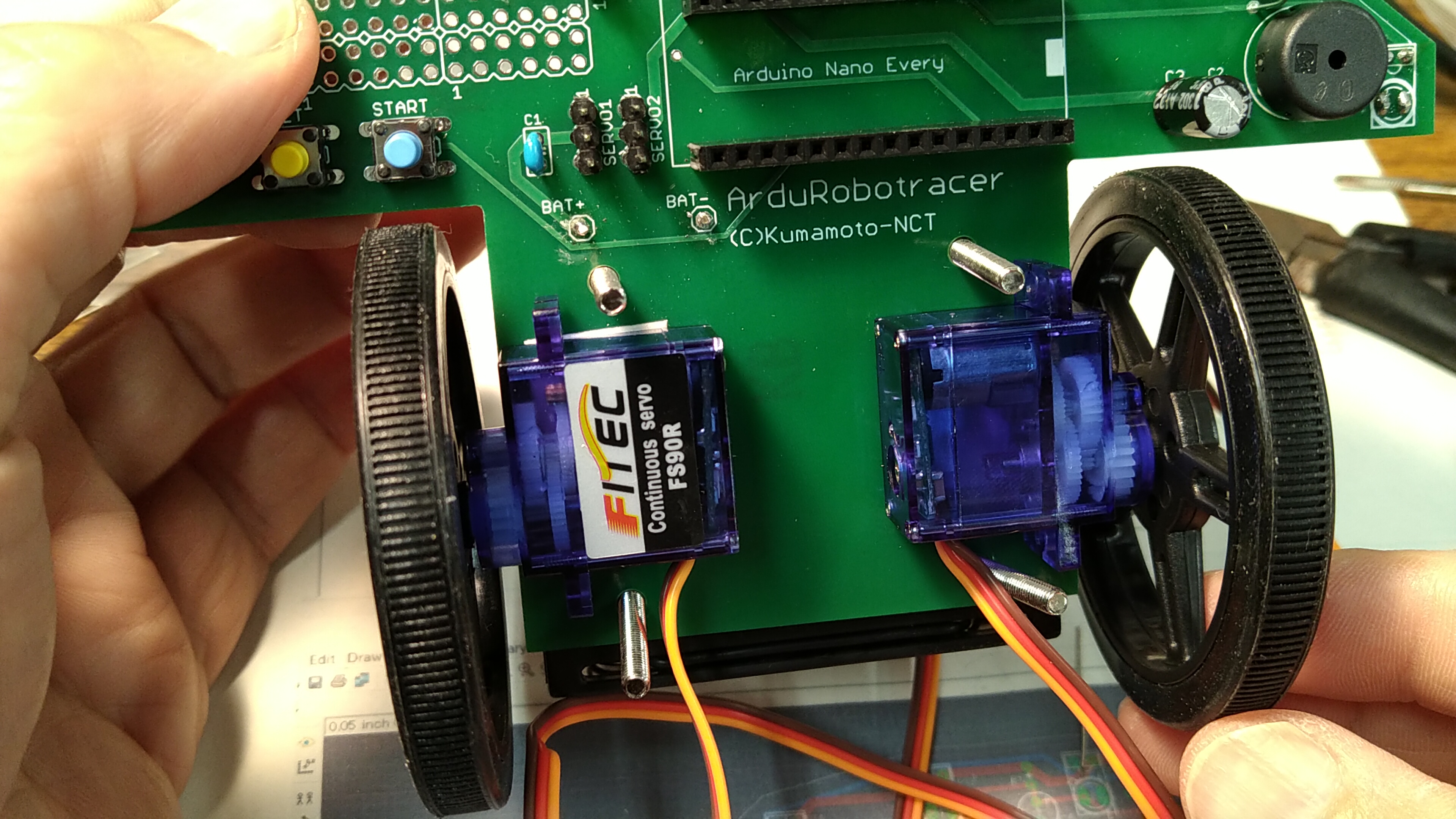
次にサーボモータに両面テープを貼って...
基板に張り付け。貼り付け方向に注意。左右で裏返しになります。
サーボモータ固定用の金具をアルミ板を切り出して別に作りました。アルミ板で押さえてナットで締めます。
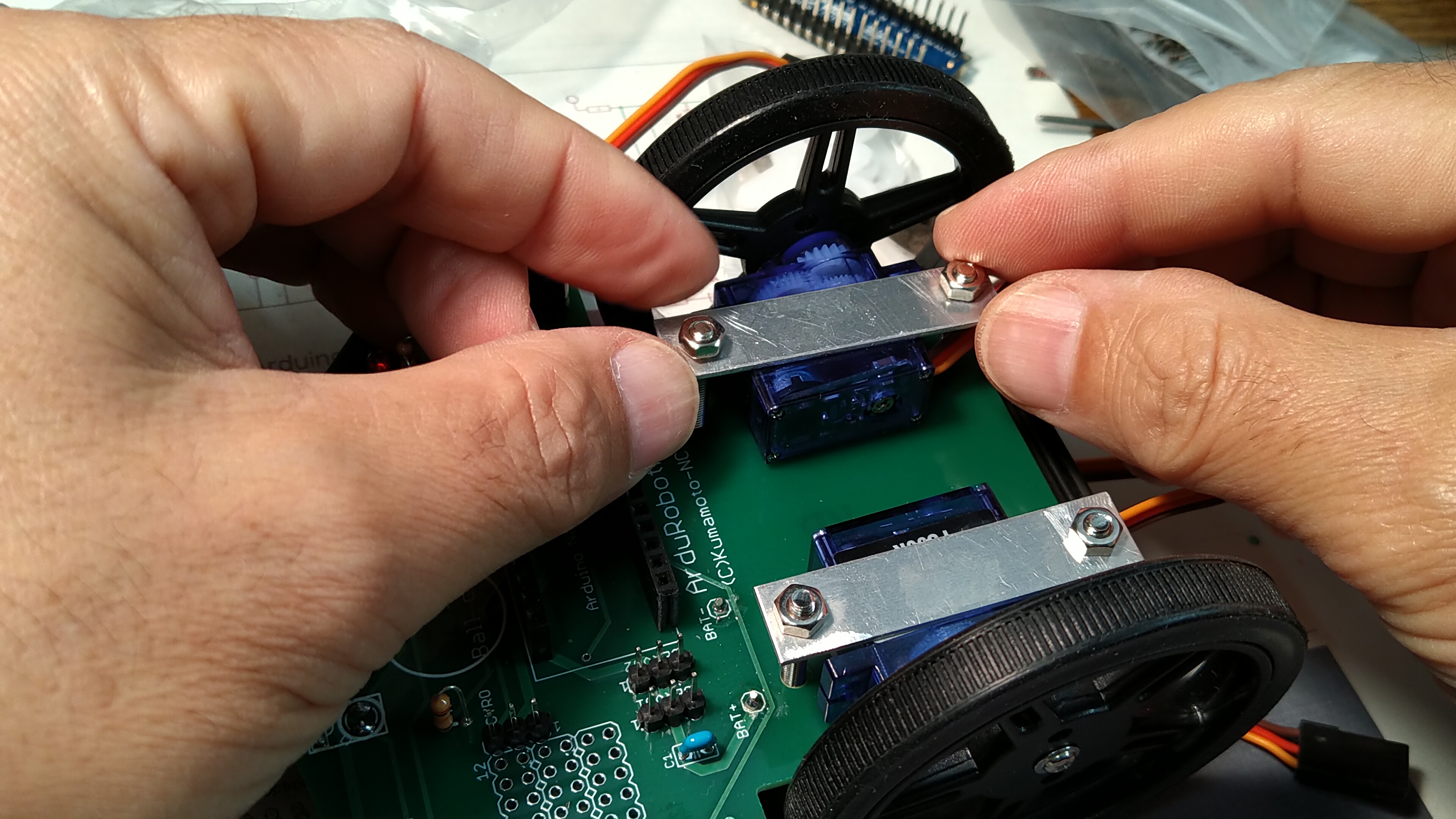
ネジの頭側は隠れているので、こんな風にネジをラジオペンチで押さえて、ナット側を回します。
これでサーボは動きません。
次に、適当なクッション材を切って...
滑り材を高さを合わせて張り付けます。
横から見たらこんな風に、基板がほぼ水平になるように調整。車輪が回ると前の滑り材で滑りながら走ることになります。丁度よい高さ大きさのボールキャスターなどがあれば取り付けられるように場所を開けてネジ穴もあけてあります。
サーボモータのケーブル2本をピンヘッダに刺します。
ケーブルは邪魔にならないようにまとめて適当なバンドで結びます。
最後にArduino Nano Everyボードを刺して...
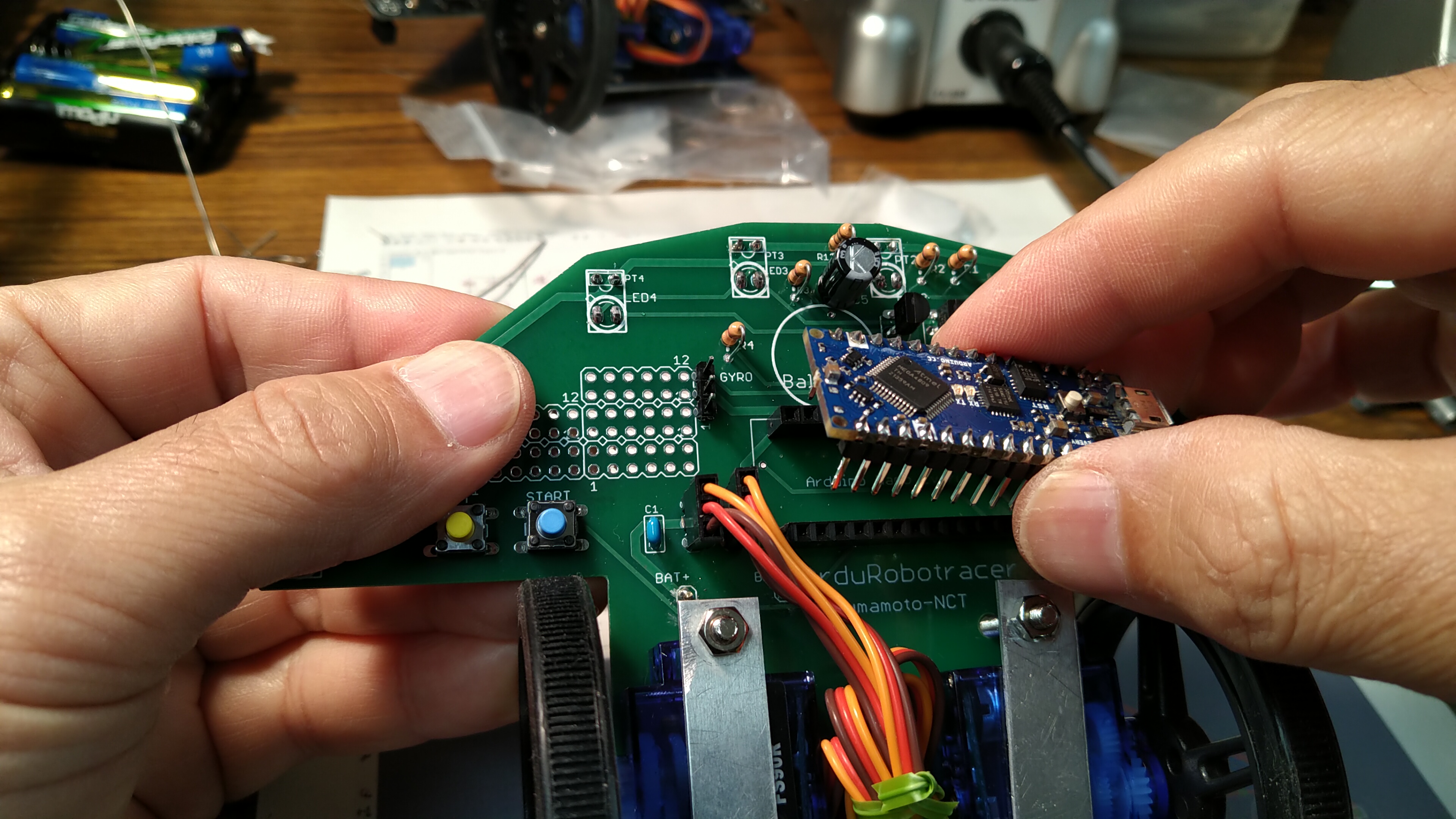
ロボット本体の完成!
部品を探して確認しながら、写真も撮りながら製作して約2時間でした。部品が揃ってて作るだけなら1時間半くらいでできると思います。
Arduino Nano Everyボードの購入はこちらから。



コメント一覧
コメント投稿

